


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
Following, I'll introduce you to the full explanation of how to develop your menu options using Flowcode 7 with Arduino. Subscribe on my channel for more projects.
In this project you will learn how to creating and modeling your machine human interface with MENU using a Arduino Uno and the LCD 16 x 2.
There are several projects using MENU for configure parameters and receive other informations of the world by the machine users.
In this article, you will see how to modeling easily your Menu using Arduino and two buttons.
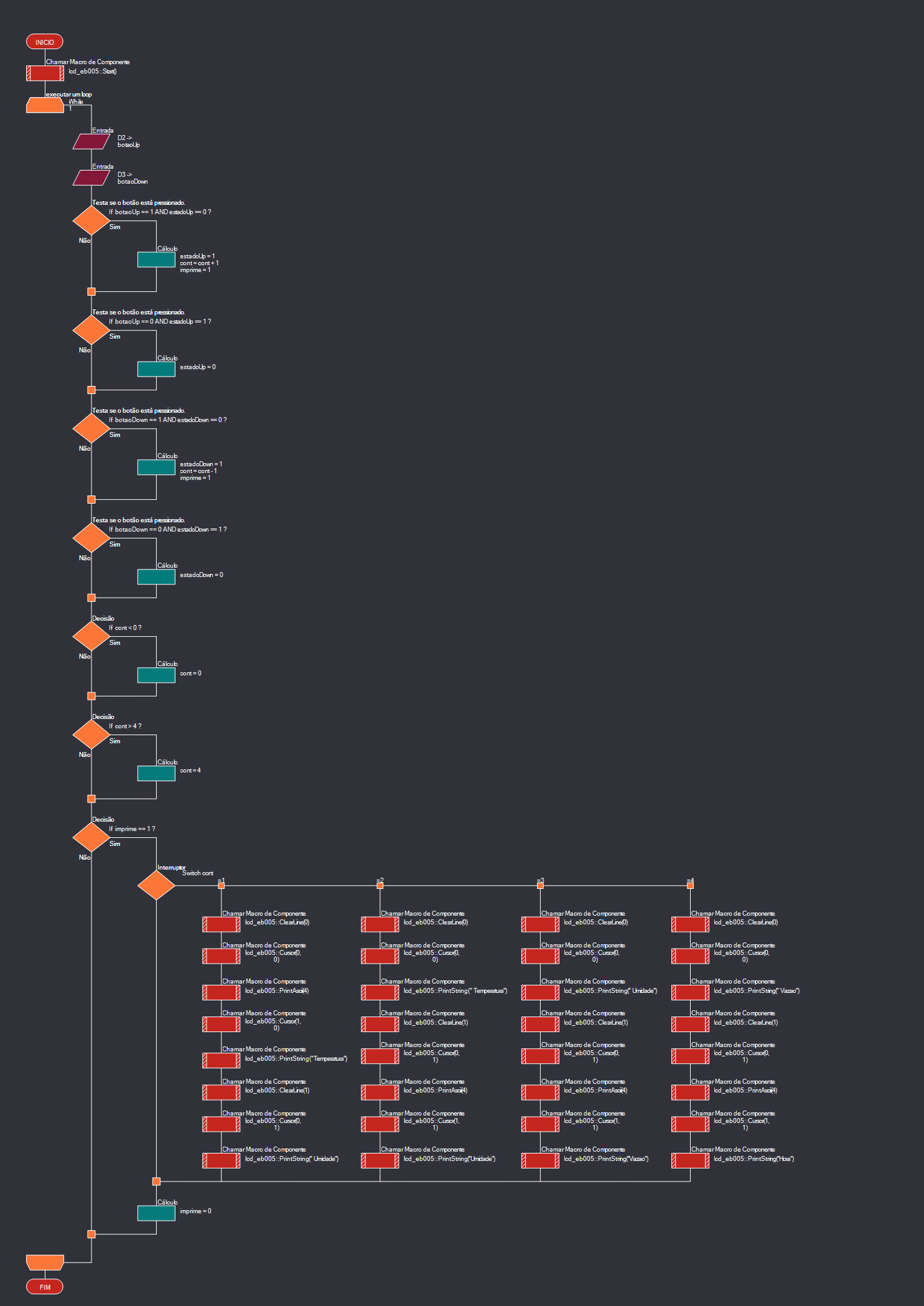
The ProjectFor modeling easily your menu with Arduino, I use the Flowcode 7. With the Flowcode 7, you can create a flowchart and modeling your programming logic, because it allows you see how your code will execute in real time through the flowchart constructed. accordingto it presented in Figure below. The Figure can be downloaded on the link of topic: Files for Download.
In the project was used two button. The first button is used to move down the options of MENU and the second button is used to move up in the options of the MENU.
Each time of the first or second button is pressed, the variable count is incremented or decremented according with the pressed button.
According with the value of count variable, will be presented the names in the Menu of LCD 16 x 2.
In this link are all files of project and image of Figure 1.
http://bit.ly/FilesDownloadFlowcode
AcknowledgmentThanks to the PCBWay for support the our YouTube Channel and produce and assembly PCBs with better quality.
The Silícios Lab thanks UTSOURCE to offer the electronic components.
Code for create a Menu With LCD 16 x 2
C/C++//************************************************************************************
//**
//** Source name: Diego mOREIRA
//** Instagram: @fcodiegomoreira and too @silicios.lab
//** Title:
//** Description:
//** Device: AVR.ATMEGA.ATMEGA328P
//**
//** Generated by: Flowcode v7.2.1.4
//**
//**
//** http://www.matrixtsl.com
//**
//************************************************************************************
#define MX_AVR
#define MX_CAL_AVR
#define MX_CLK_SPEED 16000000
#define FCP_NULL Unconnected_Port
#define MX_UART_ID
#define MX_UART_UCSRC
#include <stdlib.h>
#include <stdio.h>
#include <math.h>
#include <avr\io.h>
#include <avr\interrupt.h>
#include <avr\eeprom.h>
#include <avr\wdt.h>
/*========================================================================*\
Use :Include the type definitions
\*========================================================================*/
#include "C:\Program Files (x86)\Flowcode 7\CAL\internals.c"
/*========================================================================*\
Use :panel
:Declarações de variaveis
:Declarações de funções macro
\*========================================================================*/
#define FCV_FALSE (0)
#define FCV_TRUE (1)
MX_GLOBAL MX_SINT16 FCV_CONT = (1);
MX_GLOBAL MX_BOOL FCV_BOTAODOWN = (0);
MX_GLOBAL MX_BOOL FCV_IMPRIME = (1);
MX_GLOBAL MX_UINT8 FCV_ESTADODOWN = (0x0);
MX_GLOBAL MX_BOOL FCV_ESTADOUP = (0);
MX_GLOBAL MX_BOOL FCV_BOTAOUP = (0); // Armazena o estado do botao
/*========================================================================*\
Use :ButtonCtrl
:Declarações de variaveis
:Declarações de funções macro
\*========================================================================*/
/*========================================================================*\
Use :switch_base
:Declarações de variaveis
:Declarações de funções macro
\*========================================================================*/
MX_UINT8 FCD_05262_switch_base__ReadState();
void FCD_05262_switch_base__WaitUntilHigh();
void FCD_05262_switch_base__WaitUntilLow();
/*========================================================================*\
Use :ButtonCtrl
:Declarações de variaveis
:Declarações de funções macro
\*========================================================================*/
/*========================================================================*\
Use :switch_base
:Declarações de variaveis
:Declarações de funções macro
\*========================================================================*/
MX_UINT8 FCD_05261_switch_base__ReadState();
void FCD_05261_switch_base__WaitUntilHigh();
void FCD_05261_switch_base__WaitUntilLow();
/*========================================================================*\
Use :ctrl_lcd
:Declarações de variaveis
:Declarações de funções macro
\*========================================================================*/
/*========================================================================*\
Use :LCD
:Declarações de variaveis
:Declarações de funções macro
\*========================================================================*/
void FCD_04071_LCD__Clear();
void FCD_04071_LCD__PrintString(MX_CHAR *FCL_TEXT, MX_UINT16 FCLsz_TEXT);
void FCD_04071_LCD__PrintAscii(MX_UINT8 FCL_CHARACTER);
void FCD_04071_LCD__PrintNumber(MX_SINT16 FCL_NUMBER);
void FCD_04071_LCD__RAMWrite(MX_UINT8 FCL_INDEX, MX_UINT8 FCL_D0, MX_UINT8 FCL_D1, MX_UINT8 FCL_D2, MX_UINT8 FCL_D3, MX_UINT8 FCL_D4, MX_UINT8 FCL_D5, MX_UINT8 FCL_D6, MX_UINT8 FCL_D7);
void FCD_04071_LCD__ClearLine(MX_UINT8 FCL_LINE);
void FCD_04071_LCD__Cursor(MX_UINT8 FCL_X, MX_UINT8 FCL_Y);
void FCD_04071_LCD__Command(MX_UINT8 FCL_INSTRUCTION);
void FCD_04071_LCD__PrintFormattedNumber(MX_UINT32 FCL_NUMBER, MX_BOOL FCL_FORMAT);
void FCD_04071_LCD__ScrollDisplay(MX_UINT8 FCL_POSITION, MX_UINT8 FCL_DIRECTION);
void FCD_04071_LCD__RawSend(MX_UINT8 FCL_DATA, MX_BOOL FCL_TYPE);
void FCD_04071_LCD__RemapCharacter(MX_UINT8 FCL_REMAPIDX, MX_UINT8 FCL_SEARCHCHARACTER, MX_UINT8 FCL_REPLACEMENTCHARACTER);
void FCD_04071_LCD__Start();
/*========================================================================*\
Use :lcd_eb005
:Declarações de variaveis
:Declarações de funções macro
\*========================================================================*/
#define FCD_0ad31_lcd_eb005__Clear FCD_04071_LCD__Clear
#define FCD_0ad31_lcd_eb005__PrintString FCD_04071_LCD__PrintString
#define FCD_0ad31_lcd_eb005__PrintAscii FCD_04071_LCD__PrintAscii
#define FCD_0ad31_lcd_eb005__PrintNumber FCD_04071_LCD__PrintNumber
#define FCD_0ad31_lcd_eb005__RAMWrite FCD_04071_LCD__RAMWrite
#define FCD_0ad31_lcd_eb005__ClearLine FCD_04071_LCD__ClearLine
#define FCD_0ad31_lcd_eb005__Cursor FCD_04071_LCD__Cursor
#define FCD_0ad31_lcd_eb005__Command FCD_04071_LCD__Command
#define FCD_0ad31_lcd_eb005__PrintFormattedNumber FCD_04071_LCD__PrintFormattedNumber
#define FCD_0ad31_lcd_eb005__ScrollDisplay FCD_04071_LCD__ScrollDisplay
#define FCD_0ad31_lcd_eb005__RawSend FCD_04071_LCD__RawSend
#define FCD_0ad31_lcd_eb005__RemapCharacter FCD_04071_LCD__RemapCharacter
#define FCD_0ad31_lcd_eb005__Start FCD_04071_LCD__Start
/*========================================================================*\
Use :Include the chip adaption layer
\*========================================================================*/
#include "C:\Program Files (x86)\Flowcode 7\CAL\includes.c"
/*========================================================================*\
Use :ButtonCtrl
:Implementações de macro
\*========================================================================*/
/*========================================================================*\
Use :switch_base
:Implementações de macro
\*========================================================================*/
/*=----------------------------------------------------------------------=*\
Use :Reads the button state as 0 for released or 1 for pressed
:Performs debounce if required
:
:Retorna : MX_UINT8
\*=----------------------------------------------------------------------=*/
MX_UINT8 FCD_05262_switch_base__ReadState()
{
//Definições de variável local
MX_UINT16 FCL_DEL_COUNT;
MX_UINT8 FCL_OLD_SWITCHVAL;
MX_UINT8 FCR_RETVAL;
#if (1)
if (0 != FCP_GET(B, D, 0x8, 0x3))
{
FCR_RETVAL = 1;
} else {
FCR_RETVAL = 0;
}
FCL_DEL_COUNT = 0;
FCL_OLD_SWITCHVAL = FCR_RETVAL;
#if (1) // 10 > 0
while (FCL_DEL_COUNT < 10)
{
FCI_DELAYBYTE_MS(1);
if (0 != FCP_GET(B, D, 0x8, 0x3))
{
FCR_RETVAL = 1;
} else {
FCR_RETVAL = 0;
}
if (FCR_RETVAL == FCL_OLD_SWITCHVAL)
{
FCL_DEL_COUNT = FCL_DEL_COUNT + 1;
} else {
FCL_DEL_COUNT = 0;
}
FCL_OLD_SWITCHVAL = FCR_RETVAL;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
#else
//Código foi otimizado pelo pré-processador
#endif
return (FCR_RETVAL);
}
/*=----------------------------------------------------------------------=*\
Use :Waits until the switch is in state 'high'
:The interpretation of 'high' depends on the polarity
\*=----------------------------------------------------------------------=*/
void FCD_05262_switch_base__WaitUntilHigh()
{
//Definições de variável local
MX_UINT8 FCL_SWITCHVAL = (0xff); // The state of the pin
MX_UINT16 FCL_DEL_COUNT;
MX_UINT8 FCL_OLD_SWITCHVAL;
#if (1)
while (1)
{
FCL_SWITCHVAL = FCP_GET(B, D, 0x8, 0x3);
#if (0) // 0 == 1
//Código foi otimizado pelo pré-processador
// #else
#endif
FCL_DEL_COUNT = 0;
FCL_OLD_SWITCHVAL = FCL_SWITCHVAL;
#if (1) // 10 > 0
while (FCL_DEL_COUNT < 10)
{
FCI_DELAYBYTE_MS(1);
FCL_SWITCHVAL = FCP_GET(B, D, 0x8, 0x3);
#if (0) // 0 == 1
//Código foi otimizado pelo pré-processador
// #else
#endif
if (FCL_SWITCHVAL == FCL_OLD_SWITCHVAL)
{
FCL_DEL_COUNT = FCL_DEL_COUNT + 1;
} else {
FCL_DEL_COUNT = 0;
}
FCL_OLD_SWITCHVAL = FCL_SWITCHVAL;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
if ((FCL_SWITCHVAL == 0) == 0) break;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
}
/*=----------------------------------------------------------------------=*\
Use :Waits until the switch is in state 'low'
:The interpretation of 'high' depends on the polarity
\*=----------------------------------------------------------------------=*/
void FCD_05262_switch_base__WaitUntilLow()
{
//Definições de variável local
MX_UINT8 FCL_SWITCHVAL; // The state of the pin
MX_UINT16 FCL_DEL_COUNT;
MX_UINT8 FCL_OLD_SWITCHVAL;
#if (1)
while (1)
{
FCL_SWITCHVAL = FCP_GET(B, D, 0x8, 0x3);
#if (0) // 0 == 1
//Código foi otimizado pelo pré-processador
// #else
#endif
FCL_DEL_COUNT = 0;
FCL_OLD_SWITCHVAL = FCL_SWITCHVAL;
#if (1) // 10 > 0
while (FCL_DEL_COUNT < 10)
{
FCI_DELAYBYTE_MS(1);
FCL_SWITCHVAL = FCP_GET(B, D, 0x8, 0x3);
#if (0) // 0 == 1
//Código foi otimizado pelo pré-processador
// #else
#endif
if (FCL_SWITCHVAL == FCL_OLD_SWITCHVAL)
{
FCL_DEL_COUNT = FCL_DEL_COUNT + 1;
} else {
FCL_DEL_COUNT = 0;
}
FCL_OLD_SWITCHVAL = FCL_SWITCHVAL;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
if ((FCL_SWITCHVAL != 0) == 0) break;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
}
/*========================================================================*\
Use :ButtonCtrl
:Implementações de macro
\*========================================================================*/
/*========================================================================*\
Use :switch_base
:Implementações de macro
\*========================================================================*/
/*=----------------------------------------------------------------------=*\
Use :Reads the button state as 0 for released or 1 for pressed
:Performs debounce if required
:
:Retorna : MX_UINT8
\*=----------------------------------------------------------------------=*/
MX_UINT8 FCD_05261_switch_base__ReadState()
{
//Definições de variável local
MX_UINT16 FCL_DEL_COUNT;
MX_UINT8 FCL_OLD_SWITCHVAL;
MX_UINT8 FCR_RETVAL;
#if (1)
if (0 != FCP_GET(B, D, 0x4, 0x2))
{
FCR_RETVAL = 1;
} else {
FCR_RETVAL = 0;
}
FCL_DEL_COUNT = 0;
FCL_OLD_SWITCHVAL = FCR_RETVAL;
#if (1) // 10 > 0
while (FCL_DEL_COUNT < 10)
{
FCI_DELAYBYTE_MS(1);
if (0 != FCP_GET(B, D, 0x4, 0x2))
{
FCR_RETVAL = 1;
} else {
FCR_RETVAL = 0;
}
if (FCR_RETVAL == FCL_OLD_SWITCHVAL)
{
FCL_DEL_COUNT = FCL_DEL_COUNT + 1;
} else {
FCL_DEL_COUNT = 0;
}
FCL_OLD_SWITCHVAL = FCR_RETVAL;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
#else
//Código foi otimizado pelo pré-processador
#endif
return (FCR_RETVAL);
}
/*=----------------------------------------------------------------------=*\
Use :Waits until the switch is in state 'high'
:The interpretation of 'high' depends on the polarity
\*=----------------------------------------------------------------------=*/
void FCD_05261_switch_base__WaitUntilHigh()
{
//Definições de variável local
MX_UINT8 FCL_SWITCHVAL = (0xff); // The state of the pin
MX_UINT16 FCL_DEL_COUNT;
MX_UINT8 FCL_OLD_SWITCHVAL;
#if (1)
while (1)
{
FCL_SWITCHVAL = FCP_GET(B, D, 0x4, 0x2);
#if (0) // 0 == 1
//Código foi otimizado pelo pré-processador
// #else
#endif
FCL_DEL_COUNT = 0;
FCL_OLD_SWITCHVAL = FCL_SWITCHVAL;
#if (1) // 10 > 0
while (FCL_DEL_COUNT < 10)
{
FCI_DELAYBYTE_MS(1);
FCL_SWITCHVAL = FCP_GET(B, D, 0x4, 0x2);
#if (0) // 0 == 1
//Código foi otimizado pelo pré-processador
// #else
#endif
if (FCL_SWITCHVAL == FCL_OLD_SWITCHVAL)
{
FCL_DEL_COUNT = FCL_DEL_COUNT + 1;
} else {
FCL_DEL_COUNT = 0;
}
FCL_OLD_SWITCHVAL = FCL_SWITCHVAL;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
if ((FCL_SWITCHVAL == 0) == 0) break;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
}
/*=----------------------------------------------------------------------=*\
Use :Waits until the switch is in state 'low'
:The interpretation of 'high' depends on the polarity
\*=----------------------------------------------------------------------=*/
void FCD_05261_switch_base__WaitUntilLow()
{
//Definições de variável local
MX_UINT8 FCL_SWITCHVAL; // The state of the pin
MX_UINT16 FCL_DEL_COUNT;
MX_UINT8 FCL_OLD_SWITCHVAL;
#if (1)
while (1)
{
FCL_SWITCHVAL = FCP_GET(B, D, 0x4, 0x2);
#if (0) // 0 == 1
//Código foi otimizado pelo pré-processador
// #else
#endif
FCL_DEL_COUNT = 0;
FCL_OLD_SWITCHVAL = FCL_SWITCHVAL;
#if (1) // 10 > 0
while (FCL_DEL_COUNT < 10)
{
FCI_DELAYBYTE_MS(1);
FCL_SWITCHVAL = FCP_GET(B, D, 0x4, 0x2);
#if (0) // 0 == 1
//Código foi otimizado pelo pré-processador
// #else
#endif
if (FCL_SWITCHVAL == FCL_OLD_SWITCHVAL)
{
FCL_DEL_COUNT = FCL_DEL_COUNT + 1;
} else {
FCL_DEL_COUNT = 0;
}
FCL_OLD_SWITCHVAL = FCL_SWITCHVAL;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
if ((FCL_SWITCHVAL != 0) == 0) break;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
}
/*========================================================================*\
Use :ctrl_lcd
:Implementações de macro
\*========================================================================*/
/*========================================================================*\
Use :LCD
:Implementações de macro
\*========================================================================*/
/*=----------------------------------------------------------------------=*\
Use :Clears the entire contents of the display.
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__Clear()
{
FCD_04071_LCD__RawSend(0x01, 0);
FCI_DELAYBYTE_MS(2);
FCD_04071_LCD__RawSend(0x02, 0);
FCI_DELAYBYTE_MS(2);
}
/*=----------------------------------------------------------------------=*\
Use :Breaks down a string of text and sends it to the LCD via the private RawSend(byte, mask) macro
:
:Par??metros para a macro PrintString:
: Text[20] : Enter the text or variable to print to the LCD
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__PrintString(MX_CHAR *FCL_TEXT, MX_UINT16 FCLsz_TEXT)
{
//Definições de variável local
MX_UINT8 FCL_IDX = (0x0);
MX_UINT8 FCL_COUNT;
FCL_COUNT = FCI_GETLENGTH(FCL_TEXT, FCLsz_TEXT);
while (FCL_IDX < FCL_COUNT)
{
#if (0) // 0 > 0
//Código foi otimizado pelo pré-processador
#else
FCD_04071_LCD__RawSend(FCL_TEXT[FCL_IDX], 0x10);
#endif
FCL_IDX = FCL_IDX + 1;
}
}
/*=----------------------------------------------------------------------=*\
Use :Takes the ascii value for a character and prints the character
:
:Par??metros para a macro PrintAscii:
: character : Holds an ascii value.
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__PrintAscii(MX_UINT8 FCL_CHARACTER)
{
FCD_04071_LCD__RawSend(FCL_CHARACTER, 0x10);
}
/*=----------------------------------------------------------------------=*\
Use :Based on v5 macro, will allow you to print a number. This is limited to a signed-INT, -32768 to 32767
:
:Par??metros para a macro PrintNumber:
: Number : Enter the number or variable to print to the LCD
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__PrintNumber(MX_SINT16 FCL_NUMBER)
{
//Definições de variável local
#define FCLsz_S 10
MX_CHAR FCL_S[FCLsz_S];
FCI_TOSTRING(FCL_NUMBER, FCL_S,10);
FCD_04071_LCD__PrintString(FCL_S, FCLsz_S);
//Definições de variável local
#undef FCLsz_S
}
/*=----------------------------------------------------------------------=*\
Use :Modifies the internal memory of the LCD to allow for up to 8 customised characters to be created and stored in the device memory
:
:Par??metros para a macro RAMWrite:
: Index : Values 0 to 7
: d0 : MX_UINT8
: d1 : MX_UINT8
: d2 : MX_UINT8
: d3 : MX_UINT8
: d4 : MX_UINT8
: d5 : MX_UINT8
: d6 : MX_UINT8
: d7 : MX_UINT8
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__RAMWrite(MX_UINT8 FCL_INDEX, MX_UINT8 FCL_D0, MX_UINT8 FCL_D1, MX_UINT8 FCL_D2, MX_UINT8 FCL_D3, MX_UINT8 FCL_D4, MX_UINT8 FCL_D5, MX_UINT8 FCL_D6, MX_UINT8 FCL_D7)
{
FCD_04071_LCD__RawSend(64 + (FCL_INDEX << 3), 0);
FCI_DELAYBYTE_MS(2);
FCD_04071_LCD__RawSend(FCL_D0, 0x10);
FCD_04071_LCD__RawSend(FCL_D1, 0x10);
FCD_04071_LCD__RawSend(FCL_D2, 0x10);
FCD_04071_LCD__RawSend(FCL_D3, 0x10);
FCD_04071_LCD__RawSend(FCL_D4, 0x10);
FCD_04071_LCD__RawSend(FCL_D5, 0x10);
FCD_04071_LCD__RawSend(FCL_D6, 0x10);
FCD_04071_LCD__RawSend(FCL_D7, 0x10);
FCD_04071_LCD__Clear();
}
/*=----------------------------------------------------------------------=*\
Use :Clears a single line on the display and then moves the cursor to the start of the line to allow you to start populating the line with data.
:
:Par??metros para a macro ClearLine:
: Line : The line to clear, zero being the first (top) line of the display
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__ClearLine(MX_UINT8 FCL_LINE)
{
//Definições de variável local
MX_UINT8 FCL_X;
if (FCL_LINE < 2)
{
FCD_04071_LCD__Cursor(0, FCL_LINE);
FCL_X = 0;
while (FCL_X < 16)
{
FCD_04071_LCD__RawSend(' ', 0x10);
FCL_X = FCL_X + 1;
}
FCD_04071_LCD__Cursor(0, FCL_LINE);
// } else {
}
}
/*=----------------------------------------------------------------------=*\
Use :Moves the cursor on the LCD Display
:
:Par??metros para a macro Cursor:
: x : Set the cursor position in the X plane, 0 is the left most cell
: y : Set the cursor position in the Y plane, 0 is the top most cell
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__Cursor(MX_UINT8 FCL_X, MX_UINT8 FCL_Y)
{
#if (0) // 2 == 1
//Código foi otimizado pelo pré-processador
// #else
#endif
#if (1) // 2 == 2
if (FCL_Y == 0)
{
FCL_Y = 0x80;
} else {
FCL_Y = 0xC0;
}
// #else
//Código foi otimizado pelo pré-processador
#endif
#if (0) // 2 == 4
//Código foi otimizado pelo pré-processador
// #else
#endif
FCD_04071_LCD__RawSend(FCL_Y + FCL_X, 0);
FCI_DELAYBYTE_MS(2);
}
/*=----------------------------------------------------------------------=*\
Use :Use this method/macro to send a specific command to the LCD. Refer to the Matrix Multimedia EB006 datasheet for a list of supported instructions. For Non-Matrix LCD's refer to the manufacturers datasheet.
:
:Par??metros para a macro Command:
: instruction : Send a defined command to the LCD Screen. See datasheet for supported commands.
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__Command(MX_UINT8 FCL_INSTRUCTION)
{
FCD_04071_LCD__RawSend(FCL_INSTRUCTION, 0);
FCI_DELAYBYTE_MS(2);
}
/*=----------------------------------------------------------------------=*\
Use :Will allow you to print a number up to 32-bits with signed or unsigned formatting.
:Signed = -2147483648 to 2147483647
:Unsigned = 0 to 4294967295
:
:Par??metros para a macro PrintFormattedNumber:
: Number : Enter the number or variable to print to the LCD
: Format : 0=Signed, 1=Unsigned
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__PrintFormattedNumber(MX_UINT32 FCL_NUMBER, MX_BOOL FCL_FORMAT)
{
//Definições de variável local
#define FCLsz_S 15
MX_CHAR FCL_S[FCLsz_S];
if (FCL_FORMAT == 1)
{
FCI_UTOS32(FCL_NUMBER, FCL_S,15);
} else {
FCI_ITOS32((MX_SINT32)(FCL_NUMBER), FCL_S,15);
}
FCD_04071_LCD__PrintString(FCL_S, FCLsz_S);
//Definições de variável local
#undef FCLsz_S
}
/*=----------------------------------------------------------------------=*\
Use :Scrolls the display left or right by a number of given positions.
:
:Par??metros para a macro ScrollDisplay:
: Position : Holds the number of positions to shift the display
: Direction : 0 = left, 1 = right
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__ScrollDisplay(MX_UINT8 FCL_POSITION, MX_UINT8 FCL_DIRECTION)
{
//Definições de variável local
MX_UINT8 FCL_CMD = (0x0);
FCL_CMD = 0;
if (FCL_DIRECTION == 0)
{
FCL_CMD = 0x18;
} else {
FCL_CMD = 0x1C;
}
if (FCL_CMD != 0 && FCL_POSITION != 0)
{
while (FCL_POSITION != 0)
{
FCD_04071_LCD__RawSend(FCL_CMD, 0);
FCL_POSITION = FCL_POSITION - 1;
}
// } else {
}
}
/*=----------------------------------------------------------------------=*\
Use :Sends data to the LCD display
:
:Par??metros para a macro RawSend:
: data : The data byte to send to the LCD
: type : A boolean to indicate command type: true to write data, false to write a command
\*=----------------------------------------------------------------------=*/
void FCD_04071_LCD__RawSend(MX_UINT8 FCL_DATA, MX_BOOL FCL_TYPE)
{
//Definições de variável local
MX_UINT8 FCL_NIBBLE;
//Comentário:
//Output upper nibble of the byte
#if (1) // 0 == 0
FCP_SET(B, B, 0x1, 0x0, 0);
FCP_SET(B, B, 0x2, 0x1, 0);
FCP_SET(B, B, 0x4, 0x2, 0);
FCP_SET(B, B, 0x8, 0x3, 0);
FCP_SET(B, B, 0x10, 0x4, 0);
FCP_SET(B, B, 0x20, 0x5, 0);
#if (0)
//Código foi otimizado pelo pré-processador
// #else
#endif
FCL_NIBBLE = (FCL_DATA >> 4);
FCP_SET(B, B, 0x1, 0x0, (FCL_NIBBLE & 0x01));
FCL_NIBBLE = FCL_NIBBLE >> 1;
FCP_SET(B, B, 0x2, 0x1, (FCL_NIBBLE & 0x01));
FCL_NIBBLE = FCL_NIBBLE >> 1;
FCP_SET(B, B, 0x4, 0x2, (FCL_NIBBLE & 0x01));
FCL_NIBBLE = FCL_NIBBLE >> 1;
FCP_SET(B, B, 0x8, 0x3, (FCL_NIBBLE & 0x01));
// #else
//Código foi otimizado pelo pré-processador
#endif
//Comentário:
//Output byte to pins
#if (0) // 0 == 1
//Código foi otimizado pelo pré-processador
...
This file has been truncated, please download it to see its full contents.




{kind=link}
Comments