



Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Hey Readers today I’m back with oneof the most interesting project which was never created by anyone before, in this blog we will be making teeth brushing robot or robot that brushes teeth well as its an unique project still I couldn’t find perfect name that fits, soon ill come up with one!
Brushing your teeth daily is extremely important, as oral and dental health is directly linked to overall health.
Robot technology, human-centered design technology and system integration technology are all applied to this automatic toothbrush.
Brushing teeth has never been an easy task for most of us! This was the tagline which led to origin of this robot
At this point many might be struck thinking alas! What is he up to, I would say this is completely normal as this might be first ever thing you have come cross hence the statement, so what does it do?
This robot can brush your teeth like your normal hand does sidewise movements with brush in hand, Here one of best part is you can still continue your sleep while this will continue its task of brushing your teeth!!
Sounds cool and amazing right well its amazing as it seems, now let us quickly move on to building supplies that is required for our teeth brushing robot
Thanks NextPCB for sponsoring this project
If you have a PCB project, you can visit the NEXTPCB website to get exciting discounts and coupons.
Here are midsummer sales at NextPCB
1. Up to 30% off for PCB oders
2. Up to 20% off for PCBA oders
Only 0$ for 5-10pcs PCB Prototypes https://www.nextpcb.com/
Supplies- 3 stepper motors(2 big steppers and 1 small type)
- Arduino mega
- Geared dc motor
- Joystick modules
- Mini dc water pump
- Few aluminum frames
- Stepper drivers
- 3d printed parts
Design for this project was made using solid works software I have made all the working parts for this project by designing by myself and then printing them
Some glimpses showing design phase of this robot parts can be seen below
Note: If you cant design I have them which you can buy readily Check here(https://shopmakerq.com)
Download STL file :- (HERE)
Print PartsAfter the design was complete challenge was to print them as
these parts consumed me lots of time
After few stressful hours were complete I finally got my parts
What were the 3d printed parts?
Here I printed pulley for steeper motor and few supporting parts for holding brush and most importantly the toothpaste squeezer part
Thingverse has many deigns for toothpaste squeezer make sure to have a look on those
All the components along with 3d printed parts is given below
Yellow and red parts are printed rest were bought
Building Phase 2Frame will be next stage of this
project to make this I used aluminum sliders which I found inexpensive and efficient for this project, lengthy piece will be used upon which parts moves as similar to extruder moving in 3d printer
As the length of this is long I couldn’t make any supporters which would fit in small space so the option was to set it up outside, I also think it’s one of best idea as in indoor it would be easier to setup that would avoid messier and consuming lots of living spacelike in indoor
Setup image which I found very effective is shown here
Walls on either sides work asframe holder
After This We Will Start Making 3 Different Elements That Makes This Robot Work1. Water supply
2. Brush movement mechanism
3. Toothpaste squeezing part
Water SupplyThis is easy mechanism in our
project as it does nothing but does the job of supply of water which will be done by dc water pump
How to build this water supply mechanism
Water stored in small plastic
container that act as reservoir will be attached to frame to which water inlet port from DC water pump will be submerged as the motor switches to ON water will be coming out from discharge pipe ( pump water outlet). To avoid spill of water by any chance small plastic bowl was added
To switch on and off this motor receives signal from Arduino board which will be stated in upcoming steps
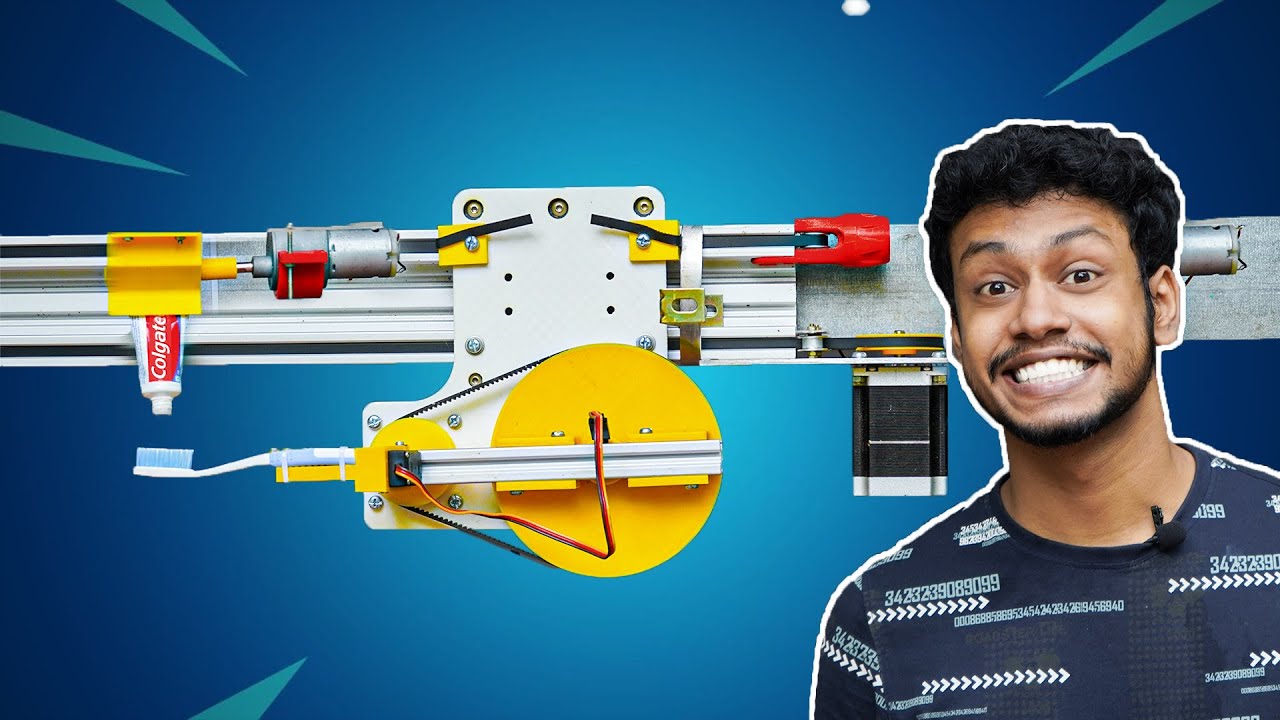
Brush Movement MechanismMain part of this project lies
here as this is responsible for cleaning your teeth even though it has many moving parts working mechanism is very simple which you can see from below image
How This Mechanism WorksThis involves combined effort of stepper and meal servo motor, stepper rotates this entire setup while servo aligns brush in proper way
Driving pulley of stepper motor was made big as to have quick movements
Gears from higher to lower reduction results in high RPM keeping this in mind pulley were connected across with belts
Servo horn was connect with brush as we often replace the brush I connected using zip ties which can be replaced easily
This completes or brushing mechanism
One main thing behind this mechanism is apart from just rotating this also slides and for this sliding mechanism other stepper motor which you can see that is placed near toothpaste mechanism is responsible please check upcoming step for image
Toothpaste Squeezing PartThis is final stage for our
hardware setup in this robot, here the working is very simple toothpaste squeezer requires twisting force from our hand but instead of hand we use power of DC motor which is geared that has sufficient torque for the purpose
SoftwareSo now we have all the hardware
setup complete for this project which means we can move onto software setup part
Software setup for this robot
Download Code (Click Here)
Arduino IDE will be used like usual to program this robot as we have all the motions that needs to be predefined an work in a sequence
Working of this robot
After all the coding part is complete robot is ready to use, as you are new here let me go through steps on how to use this
Working Step 1Stand in front of ultrasonic
sensor which activates the entire system toothbrush moves near water supply part where it gets washed first
WorkingPost of which go near watering
system and get some shots of water to rinse your mouth!
Later you can watch your robotmoving towards toothpaste squeezer in meantime you need to stand back near ultrasonic sensor area
Place your teeth in front of brushand then it starts sliding mechanism horizontally that means your teeth is getting brushed first it takes of right side followed by left side
After some time brush moves towater area and get washed by itself after which its your turn to do same
After some time brush moves to
water area and get washed by itself after which its your turn to do same
visit our website DiY Projects Lab having more than 25 awesome detailed projects






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.