




Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
This project presents an open hardware/software test bench for solar tracker. The proposed prototype is based on a dual-axis solar tracker controlled with Arduino Uno which is an open-source prototyping platform based on easy-to-use hardware and software. The solar tracker can be controlled automatically with the help of LightDependent Resistor (LDR) sensors or manually using a potentiometer. Moreover, this test bench provides virtual instrumentation based on Excel in which its solar tracker data can be recorded and presented. The hardware used has been chosen to be inexpensive, compact and versatile. The proposed test bench is designed to help students develop their understanding of control theory and their application.
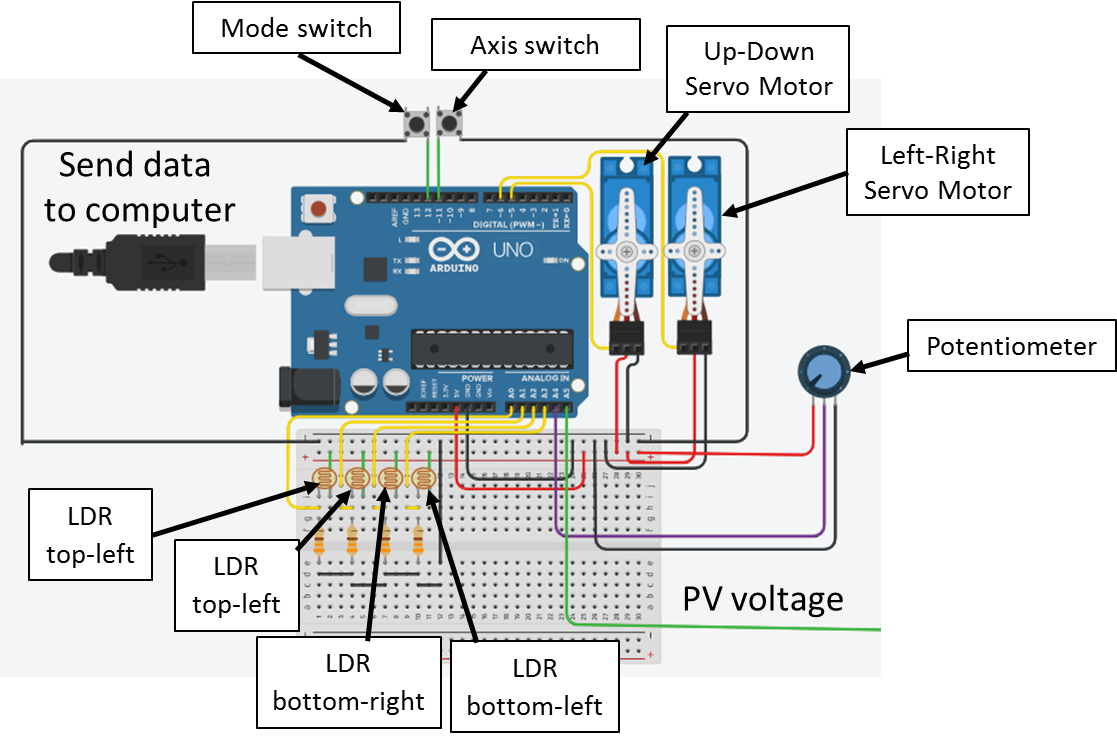
The proposed test bench is presented in Fig. 1. It is based on a solar tracker that can rotate automatically to track the sun with the help of four LDR sensors and two servomotors (SM1 and SM2), or manually using a potentiometer. To switch between the two modes (automatic and manual), a push-button is used. Another push-button is used to link either the SM1(up-down servomotor) or SM2 (left-right servomotor) to the potentiometer to control their movement. Moreover, a computer is used as a virtual instrument to visualize the mode and current, voltage and power of the PV panel according to time in MS Excel. Arduino Uno board is utilized to implement all software requirements of the system.
Mechanical design
As shown in Fig. 2, the computer-aided design (CAD) 3D model of the solar tracker is designed in CATIA. It is composed of the PV panel, the left-right and up-down servomotors, and four LDR sensors. For the horizontal axis, a bearing is fixed in parallel with the up-down servomotor for better flexibility. The solar tracker is designed to have two degrees of freedom, from east to west by the left-right servomotor and from south to north by the up-down servomotor. The LDR sensors are placed in the four corners of the PV panel and are put in dark tubes with a small hole on the top to detect the illumination of the sun. These dark tubes are also considered a concentrator of radiation and are used to increase the solar tracker robustness.
Hardware system
Fig. 3 presents the electronic circuit of the proposed testbench. For automatic mode, the microcontroller converts the analogs values of LDRsensors (pins A0 to A3) into digitals. Then it controls two servomotors(up-down and left-right) using two Pulse-Width Modulation (PWM) signals (pins 5and 6) to track the sun. The rotation movements occur in two axes, in azimuth from east to west according to the daily sun's path and in elevation from south to north according to the seasonal sun's path. For manual mode, a potentiometer (pin A4) is used to control the movement of the two servo motors, a push-button (pin 11) is deployed to connect the potentiometer either to up-down servomotor or left-right servomotor. Besides, another pushbutton (pin 12) is used to switch between the two modes. Furthermore, the PV voltage is measured through the analog pin A5 of the Arduino, then the PV current is calculated since the resistor of the load is already known. Next, the PV current, voltage and power versus time and the actual mode are sent to the computer to present them in real-time on MS Excel.
The LDR sensor circuitry is designed as a voltage divider circuit. The variation in the light intensity is proportional to the variation of the divider output voltage. The top of the potential divider is 5 V, the ground is at 0 V, and the output of the voltage divider is connected to an analog input (A0 for instance) of the microcontroller. Subsequently, the Analog to Digital Converter(ADC) of the microcontroller converts the analog value read by A0 into a digital value between 0 and 1023 because the ADC is coded in 10 bits, and according to this value, it is possible to know the level of light. The value of resistors used in voltage dividers is 330 Ω.
Two 180 degrees servomotors are used. A servomotor (MG996R) to control the solar tracker according to the vertical axis, which is the left-right servomotor. And a micro servo motor (SG90) to control the solar tracker according to the horizontal axis, which is the up-down servomotor. The advantage of the servomotor is that we can control its stop, run, the direction of rotation and speed using a single low current wire connected directly to an output of the microcontroller without needing any drivers. The used servo motors are controlled by the Arduino UNO board via 3-wire electrical cable as shown in Fig. 3, two wires for supply and one wire for PWM to control its positions.
The embedded software design
The embedded software is the piece that will be embedded in the hardware (Arduino Uno) to control and monitor the solar tracker test bench. The embedded software is designed to cover the following requirements:
1. The test bench has two modes: manual and automatic. A pushbutton is connected to pin 12 to switch between the two modes.
2. If the manual mode is active, the potentiometer can control servomotors either from east to west for left-right motor or from south to north for the up-down motor. A push-button is connected to pin 11 to switch the potentiometer between the two motors, either it controls the left-right servomotor or up-down servo motor.
3. If the automatic mode is active, the algorithm presented in Fig. 4 will be executed. The latter uses the analog values returned by LDR sensors. For instance, considering azimuth or vertical axis, the average values from two right LDRs and two left LDRs are compared and if the left set of LDRs receives more light, the solar tracker will move in that direction through the left-right servomotor. The latter will continue to rotate until the difference result is in the range [−10, 10]. This range is used to stabilize the controller and once the solar tracker is perpendicular to the sun, no further control is made. On the other hand, if the right set of LDRs receive more light, the solar tracker moves in that direction through the left-right servomotor and will continue to rotate until the difference result is in the range [−10, 10]. The same way is used for the elevation axis. Moreover, we also determined the average radiation between the four LDR sensors and if this value is less than a little value (8: a value which has been adjusted and tested practically and is returned when the irradiation is null). That is to say, the night has come. In this case, the solar tracker must return to the sun’s rising position. For example, if the sun’s rising position can be reached by setting 0 degrees in the left-right servomotor, and 30 degrees in the up-down servomotor. This can easily be done through the C function “servox. write(angle)” provided by Arduino IDE.
4. The PV voltage acquired through the analog pin A5 must be treated and used to compute the PV current and power. Then all these data and the actual mode must be sent through a USB cable to the computer and then present them in MS Excel.
The PLX-DAQ Excel Macro is used for data acquisition from the Arduino microcontroller to an Excel Spreadsheet. We only need to download it. After installation, a folder named "PLX-DAQ" will automatically be created on the PC in which a shortcut named "PLX-DAQ Spreadsheet" is inside. Then, to establish the communication between the board and Excel, we just need to open the Spreadsheet and defining the connections settings (Baud rate and port) in the PLX-DAQ window (Fig. 5). Thereafter, after clicking on "connect" the output data will be collected and displayed in real-time on the Excel Spreadsheet
The prototype
Figure 6 shows the solar tracker in detached and assembled states. As presented, the entire structure has been manufactured using wooden plates, and it is clear that the all mentioned components have been used to build the solar tracker with manual and automatic modes (LDR sensors, Arduino Uno, Servo motors, potentiometer, pushbuttons, and the small PV panel).
Figure 7 shows the entire test bench, solar tracker with virtual instrumentation, and an artificial lamp that can expose light to test the solar tracker. The solar tracker and the computer are connected through a USB cable. Once the PV voltage is acquired, the controller treats this information and uses it to compute the PV current and power. Then, all these data are sent to the computer to present them in MSExcel. From Figs. 5 and 6, it is clear that the proposed test bench is small, flexible and easy to use. It can enable students, researchers and engineers to apply their algorithms in an easy way before proceeding with the implementation of a large solar tracking device.




{kind=link}
Comments
Please log in or sign up to comment.