#define BA{B00111100,B01000010,B01000010,B01000010,B01111110,B01000010,B01000010,B01000010}
#define BB{B01111100,B01000010,B01000010,B01111100,B01000010,B01000010,B01000010,B01111100}
#define BC{B00111100,B01000010,B01000000,B01000000,B01000000,B01000000,B01000010,B00111100}
#define BD{B01111000,B01000100,B01000010,B01000010,B01000010,B01000010,B01000100,B01111000}
#define BE{B01111110,B01000000,B01000000,B01111100,B01000000,B01000000,B01000000,B01111110}
#define BF{B01111110,B01000000,B01000000,B01111100,B01000000,B01000000,B01000000,B01000000}
#define BG{B00111100,B01000010,B01000000,B01000000,B01001110,B01000010,B01000010,B00111100}
#define BH{B01000010,B01000010,B01000010,B01111110,B01000010,B01000010,B01000010,B01000010}
#define BI{B01111100,B00010000,B00010000,B00010000,B00010000,B00010000,B00010000,B01111100}
#define BJ{B00111110,B00001000,B00001000,B00001000,B00001000,B00001000,B01001000,B00110000}
#define BK{B01000100,B01001000,B01010000,B01100000,B01100000,B01010000,B01001000,B01000100}
#define BL{B01000000,B01000000,B01000000,B01000000,B01000000,B01000000,B01000000,B01111110}
#define BM{B10000010,B11000110,B10101010,B10101010,B10010010,B10010010,B10000010,B10000010}
#define BN{B01000010,B01100010,B01010010,B01010010,B01001010,B01001010,B01000110,B01000010}
#define BO{B00111100,B01000010,B01000010,B01000010,B01000010,B01000010,B01000010,B00111100}
#define BP{B01111100,B01000010,B01000010,B01000010,B01111100,B01000000,B01000000,B01000000}
#define BQ{B00111100,B01000010,B01000010,B01000010,B01000010,B01000010,B01000100,B00111010}
#define BR{B01111100,B01000010,B01000010,B01111100,B01010000,B01001000,B01000100,B01000010}
#define BS{B00111100,B01000010,B01000000,B00110000,B00001100,B00000010,B01000010,B00111100}
#define BT{B01111100,B00010000,B00010000,B00010000,B00010000,B00010000,B00010000,B00010000}
#define BU{B01000010,B01000010,B01000010,B01000010,B01000010,B01000010,B01000010,B00111100}
#define BV{B01000100,B01000100,B01000100,B01000100,B01000100,B01000100,B00101000,B00010000}
#define BW{B10000010,B10000010,B10000010,B10000010,B10010010,B10010010,B10101010,B01101100}
#define BX{B10000010,B10000010,B01000100,B00101000,B00010000,B00101000,B01000100,B10000010}
#define BY{B10000010,B10000010,B01000100,B00101000,B00010000,B00010000,B00010000,B00010000}
#define BZ{B01111110,B00000010,B00000100,B00001000,B00010000,B00100000,B01000000,B01111110}
#define LA{B00000000,B00000000,B00000000,B00111000,B00000100,B00111100,B01000100,B00111000}
#define LB{B01000000,B01000000,B01000000,B01000000,B01111000,B01000100,B01000100,B01111000}
#define LC{B00000000,B00000000,B00000000,B00111100,B01000000,B01000000,B01000000,B00111100}
#define LD{B00000100,B00000100,B00000100,B00000100,B00111100,B01000100,B01000100,B00111100}
#define LE{B00000000,B00000000,B00000000,B00111000,B01000100,B01011000,B01000000,B00111100}
#define LF{B00111000,B01000100,B01000000,B01000000,B01111000,B01000000,B01000000,B01000000}
#define LG{B00111000,B01000100,B01000100,B01000100,B00111000,B00000100,B00000100,B01111000}
#define LH{B01000000,B01000000,B01000000,B01111000,B01000100,B01000100,B01000100,B01000100}
#define LI{B00000000,B00000000,B00010000,B00000000,B00010000,B00010000,B00010000,B00010000}
#define LJ{B00000000,B00001000,B00000000,B00001000,B00001000,B00001000,B01001000,B00110000}
#define LK{B00000000,B01000000,B01000000,B01001000,B01010000,B01100000,B01010000,B01001000}
#define LL{B00100000,B00100000,B00100000,B00100000,B00100000,B00100000,B00100000,B00011000}
#define LM{B00000000,B00000000,B00000000,B01000000,B01101100,B01010100,B01000100,B01000100}
#define LN{B00000000,B00000000,B00000000,B01000000,B01111000,B01000100,B01000100,B01000100}
#define LO{B00000000,B00000000,B00000000,B00111000,B01000100,B01000100,B01000100,B00111000}
#define LP{B00000000,B00000000,B00111000,B01000100,B01000100,B01111000,B01000000,B01000000}
#define LQ{B00000000,B00000000,B00111000,B01000100,B01000100,B00111100,B00000100,B00000100}
#define LR{B00000000,B00000000,B00111000,B01000100,B01000000,B01000000,B01000000,B01000000}
#define LS{B00000000,B00000000,B00111000,B01000100,B01100000,B00011100,B01000100,B00111000}
#define LT{B00100000,B00100000,B00100000,B01111000,B00100000,B00100000,B00100000,B00011000}
#define LU{B00000000,B00000000,B00000000,B01000100,B01000100,B01000100,B01000100,B00111100}
#define LV{B00000000,B00000000,B00000000,B01000100,B01000100,B01000100,B00101000,B00010000}
#define LW{B00000000,B00000000,B00000000,B01000100,B01000100,B01010100,B01010100,B00111000}
#define LX{B00000000,B00000000,B00000000,B01000100,B00101000,B00010000,B00101000,B01000100}
#define LY{B00000000,B00000000,B00000000,B01000100,B01000100,B00111100,B00000100,B01111000}
#define LZ{B00000000,B00000000,B00000000,B01111100,B00000100,B00111000,B01000000,B01111100}
#define SPACE{B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000}
#define NUM0{B00111100,B01000010,B01000110,B01001010,B01010010,B01100010,B01000010,B00111100}
#define NUM1{B00011000,B00111000,B00011000,B00011000,B00011000,B00011000,B00011000,B00111100}
#define NUM2{B00111100,B01000010,B00000010,B00000010,B00001100,B00110000,B01000000,B01111110}
#define NUM3{B00111100,B01000010,B00000010,B00000010,B00011100,B00000010,B01000010,B00111100}
#define NUM4{B01000010,B01000010,B01000010,B01000010,B00111110,B00000010,B00000010,B00000010}
#define NUM5{B01111110,B01000000,B01000000,B01111100,B00000010,B00000010,B01000010,B00111100}
#define NUM6{B01111110,B01000000,B01000000,B01000000,B01111110,B01000010,B01000010,B01111110}
#define NUM7{B01111110,B00000010,B00000100,B00000100,B00001000,B00001000,B00010000,B00010000}
#define NUM8{B00111100,B01000010,B01000010,B01111110,B01000010,B01000010,B01000010,B00111100}
#define NUM9{B01111110,B01000010,B01000010,B01111110,B00000010,B00000010,B01000010,B01111110}
#define DEVIDE{B00000100,B00000100,B00001000,B00001000,B00010000,B00010000,B00100000,B00100000}
#define TWODOTS{B00000000,B00011000,B00011000,B00000000,B00000000,B00011000,B00011000,B00000000}
#define DOT{B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B01100000,B01100000}
#define COMA{B00000000,B00000000,B00000000,B00000000,B00000000,B00110000,B00110000,B01100000}
#define LINE{B00000000,B00000000,B00000000,B01111110,B01111110,B00000000,B00000000,B00000000}
#define QUASTION{B00111000,B01000100,B00000100,B00000100,B00001000,B00010000,B00000000,B00010000}
#define MARK{B00011000,B00011000,B00011000,B00011000,B00011000,B00000000,B00011000,B00011000}
/*
#define LESSTHAN
#define GRATTHAN
#define AT
#define POUND
#define DOLLAR
#define PERCENT
#define CARAT
#define AND
#define ASTERISK
#define LPARENTH
#define RPARENTH
#define HYPHEN
#define UNSCORE
#define PLUS
#define EQUALS
#define DASH
#define LBRACKET
#define RBRACKET
#define SYM[
#define SYM]
#define SYM|
#define SYM\
#define SYM`
#define SYM~
#define SYM;
#define SYM:
*/
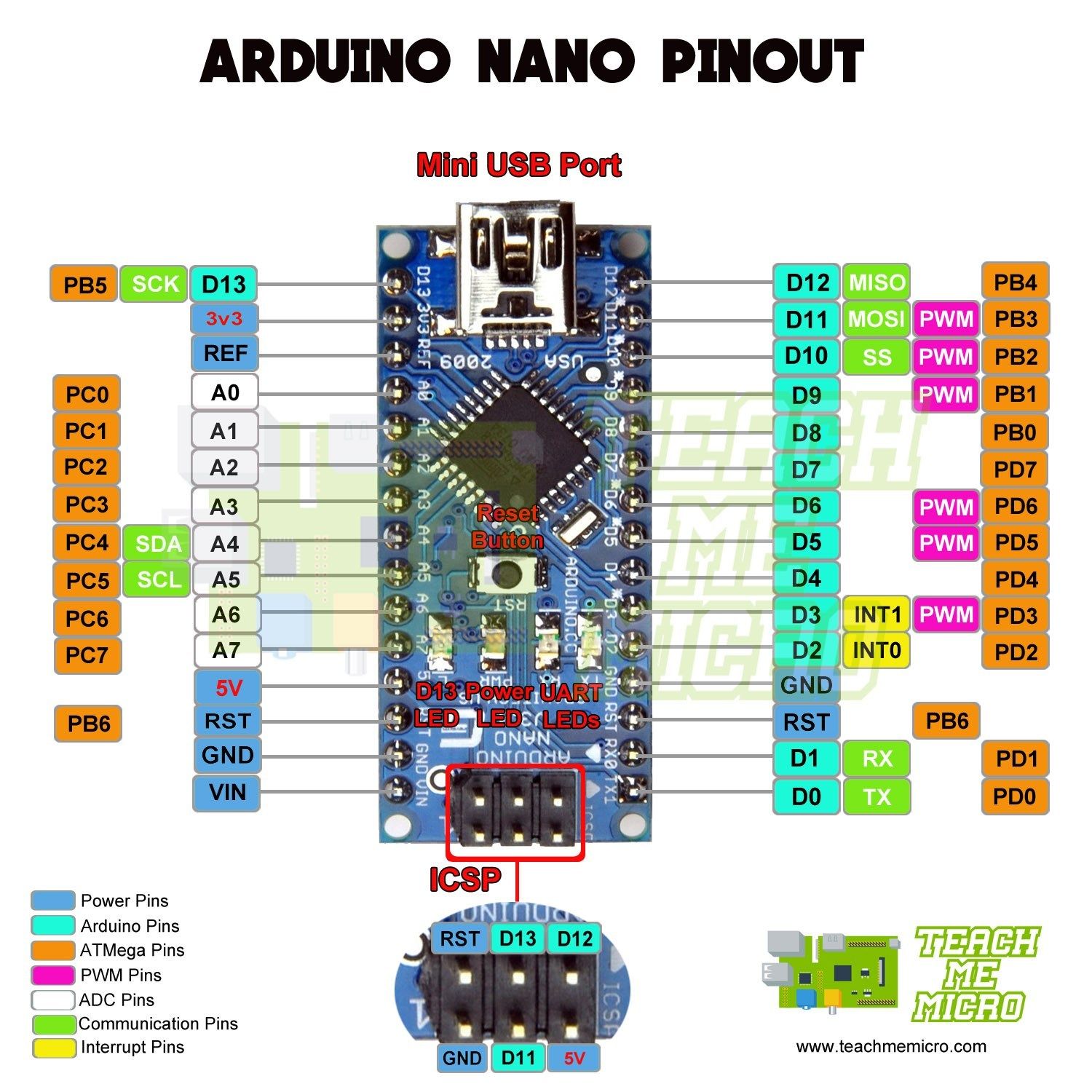
int latchPin = 10;
int clockPin = 13;
int dataPin = 11;
int clock = 9;
int Reset = 8;
int latchPinPORTB = latchPin - 8;
int clockPinPORTB = clockPin - 8;
int dataPinPORTB = dataPin - 8;
int i = 0;
long scrolling_word[16];
int array_turn = 0;
byte your_text[60][8] = {BP,BU,BS,BP,BA}; //PUT YOUR TEXT HERE
void setup() {
Serial.begin(9600);
pinMode(dataPin, OUTPUT);
pinMode(clockPin, OUTPUT);
pinMode(latchPin, OUTPUT);
pinMode(clock, OUTPUT);
pinMode(Reset, OUTPUT);
digitalWrite(Reset, HIGH);
digitalWrite(Reset, LOW);
setupSPI();
}
void display_word(int loops, byte word_print[][8], int num_patterns, int delay_langth) { // this function displays your symbols
i = 0;// resets the counter fot the 4017
for (int g = 0; g < 8; g++) //resets the the long int where your word goes
scrolling_word[g] = 0;
for (int x = 0; x < num_patterns; x++) { //main loop, goes over your symbols
// you will need to find a better way to make the symbols scroll my way is limited for 24 columns
for (int r = 0; r < 8; r++) //puts the buildes the first symbol (also controls how many columns are displayed)
scrolling_word[r] |= word_print[x][r];
for (int z = 0; z < 8; z++) { //the scrolling action (Z is also pretty much a kerning variable- larger vale = more space between letters)
for (int p = 0; p < 8; p++)
scrolling_word[p] = scrolling_word[p] << 1;
// end of the scrolling funcion
for (int t = 0; t < delay_langth; t++) { // delay function, it just loops over the same display
for (int y = 0; y < 8; y++) { // scaning the display
if (i == 8) { // counting up to 8 with the 4017
digitalWrite(Reset, HIGH);
digitalWrite(Reset, LOW);
i = 0;
}
latchOff();
spi_transfer(make_word(0x01000000, y)); // sending the data
spi_transfer(make_word(0x00010000, y));
spi_transfer(make_word(0x00000100, y));
latchOn();
delayMicroseconds(2000);//waiting a bit
latchOff();
spi_transfer(0);// clearing the data
spi_transfer(0);
spi_transfer(0);
latchOn();
digitalWrite(clock, HIGH); //counting up with the 4017
digitalWrite(clock, LOW);
i++;
}
}
}
}
finish_scroll(delay_langth);
}
void finish_scroll(int delay_scroll) { // this function is the same as the funcion above, it just finishing scrolling
for (int n = 0; n < 24; n++) {
for (int h = 0; h < 8; h++)
scrolling_word[h] = scrolling_word[h] << 1;
for (int w = 0; w < delay_scroll; w++) {
for (int k = 0; k < 8; k++) {
if (i == 8) {
digitalWrite(Reset, HIGH);
digitalWrite(Reset, LOW);
i = 0;
}
latchOff();
spi_transfer(make_word(0x01000000, k));
spi_transfer(make_word(0x00010000, k));
spi_transfer(make_word(0x00000100, k));
latchOn();
delayMicroseconds(2000);
latchOff();
spi_transfer(0);
spi_transfer(0);
spi_transfer(0);
latchOn();
digitalWrite(clock, HIGH);
digitalWrite(clock, LOW);
i++;
}
}
}
}
byte make_word (long posistion, byte turn) {
byte dummy_word = 0;
for (int q = 0; q < 8; q++) {
if (scrolling_word[turn] & (posistion << q))
dummy_word |= 0x01 << q;
}
return dummy_word;
}
void loop() {
display_word(1, your_text, 20, 15); // calls for the display_pattern function and says that int loop = 15(if you do more loop the pattern whould scrole slower).
// the seconds variable in this (20 in this case), controls how many letters your display can hold at one time.
}
void latchOn() {
bitSet(PORTB, latchPinPORTB);
}
void latchOff() {
bitClear(PORTB, latchPinPORTB);
}
void setupSPI() {
byte clr;
SPCR |= ( (1 << SPE) | (1 << MSTR) ); // enable SPI as master
//SPCR |= ( (1<<SPR1) | (1<<SPR0) ); // set prescaler bits
SPCR &= ~( (1 << SPR1) | (1 << SPR0) ); // clear prescaler bits
clr = SPSR; // clear SPI status reg
clr = SPDR; // clear SPI data reg
SPSR |= (1 << SPI2X); // set prescaler bits
//SPSR &= ~(1<<SPI2X); // clear prescaler bits
delay(10);
}
byte spi_transfer(byte data) {
SPDR = data; // Start the transmission
while (!(SPSR & (1 << SPIF))){}; // Wait the end of the transmission
return SPDR; // return the received byte, we don't need that
}



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





Comments