Password Based Door Lock System using Arduino is a high-security project where a secure password will act as a door unlocking system. Traditional lock systems using mechanical lock and key mechanisms are being replaced by new advanced techniques of locking systems. These techniques are an integration of mechanical and electronic devices and are highly intelligent. One of the prominent features of these innovative lock systems is high efficiency.
Such an automatic lock system consists of an electronic control assembly, which controls the output load through a password. This output load will be an electric motor to open the security gate.
This system demonstrates a Password-based Door Lock System using Arduino, wherein once the correct code or password is entered, the door is opened, the concerned person is allowed access to the secured area. Again, if another person arrives, it will ask to enter the password. If the password is wrong, then the door would remain closed, it will employ an audible alarm to alert the security services.
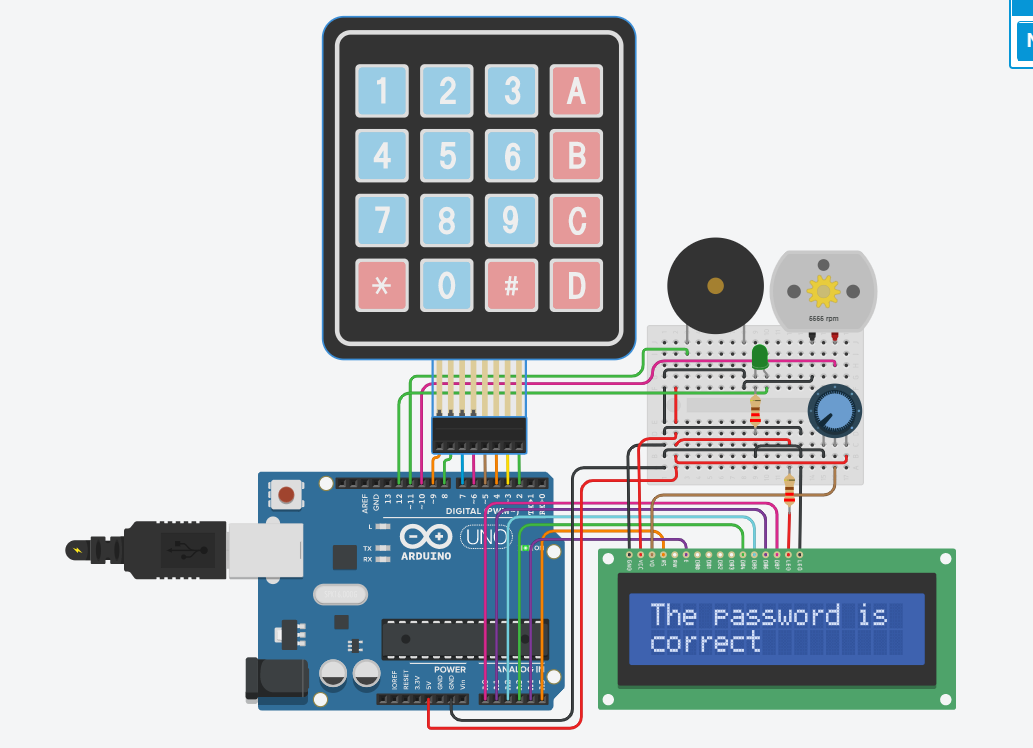
The main component in the circuit is Arduino. In this project, a 4×4 Matrix Keypad is used to enter the password and a 16x2 alphanumeric LCD to display the password and final status of the person. The password which is entered is compared with the predefined password.
If the entered password is correct, then the system opens the door by rotating the door electric motor and displays “The password is correct” on LCD.
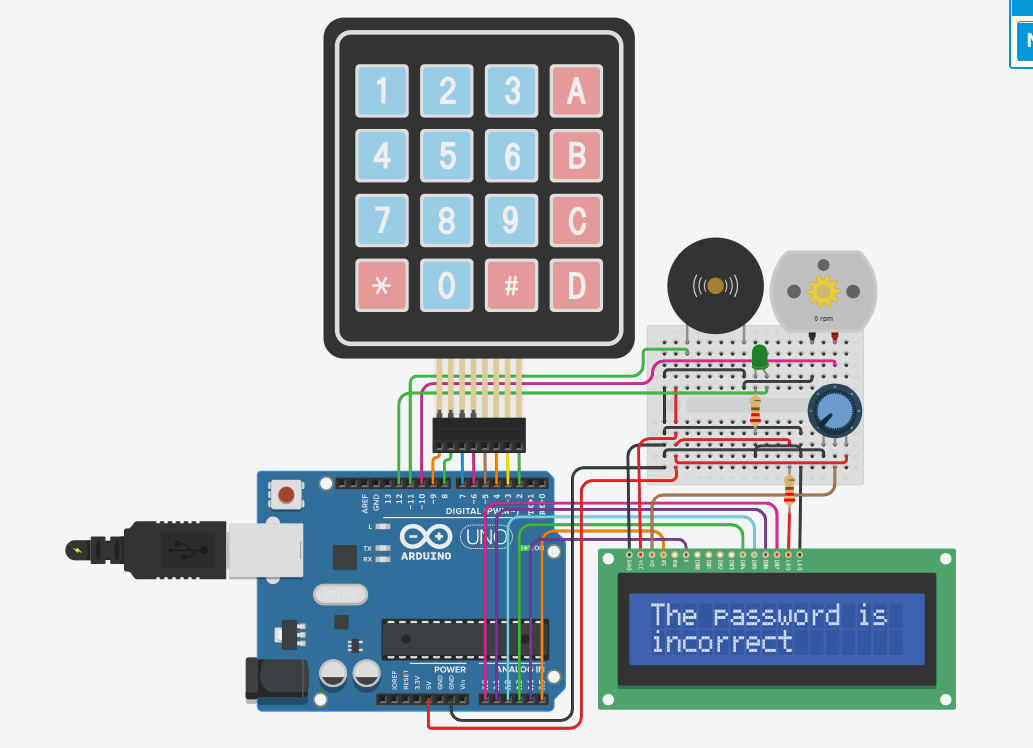
If the password is wrong, then the door remains closed, and it will employ an audible alarm to alert the security services and displays “The password is incorrect” on LCD.
The link of working project is given below.
https://youtu.be/QdsK_zng5qE




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











{kind=link}
{kind=link}
Comments