#include<LiquidCrystal.h> // Include LiquidCrystal library
float temperature; // Variable for storing the input value of temperature sensor
float voltage; // Variable for storing the given voltage of teperature sensor
float temp_in_celsius; // Variable for storing the value in celsius
float temp_in_fahernheit; // Variable for storing the value in fahernheit
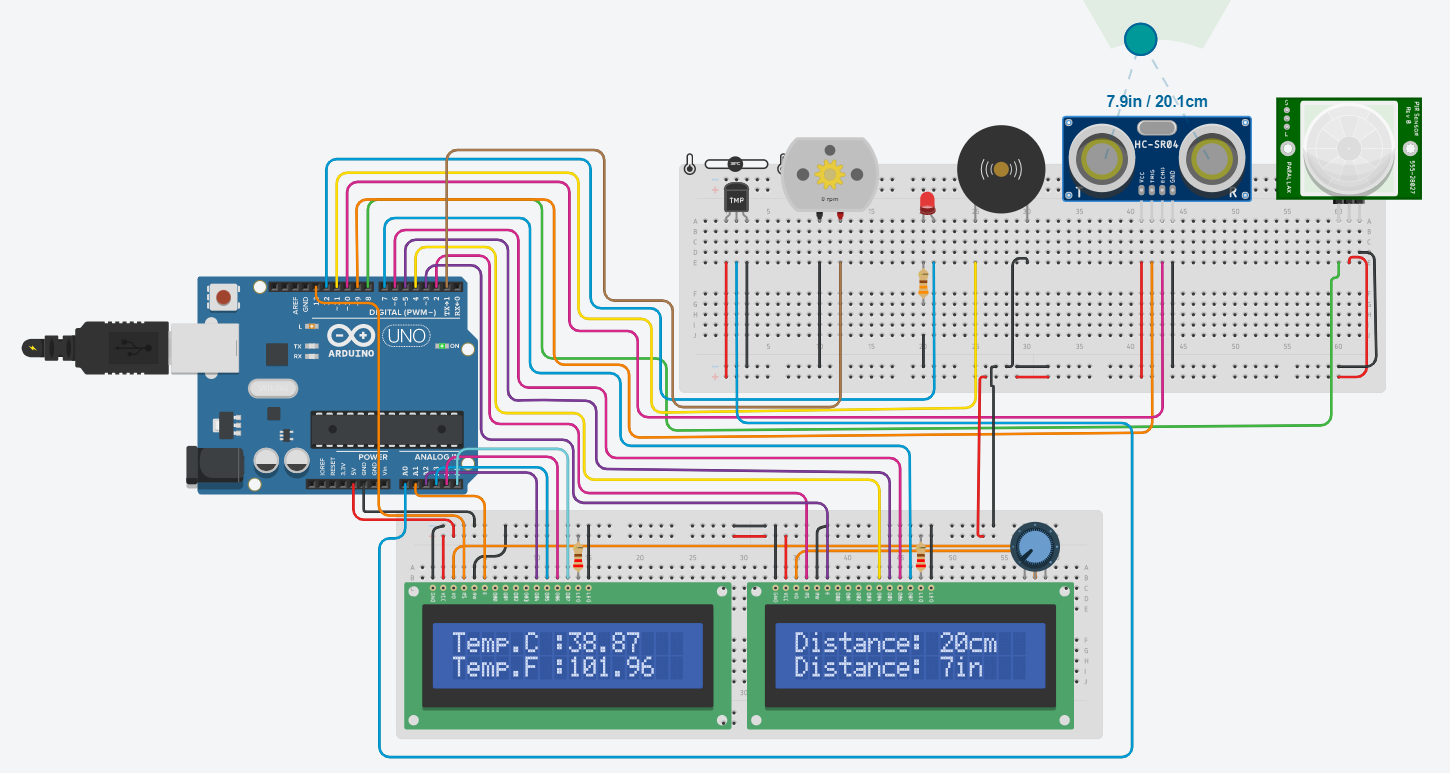
const int trigPin = 9; // Trigger pin of ultrasonic sensor
const int echoPin = 10; // Echo pin of ultrasonic sensor
long duration; // Variable for storing the input value of ultrasonic sensor
int distance_in_cm; // Variable for storing the distance in centimeters
int distance_in_inches; // Variable for storing the distance in Inches
int pir_sensor = 8; // Pin connected to output pin of PIR sensor
int Motor = 1; // Pin connected to motor
int Buzzer = 11; // Pin connected to Buzzer
int Led = 12; // Pin connected to LED
int tmp_36 = A0; // Pin connected to output pin of temperature sensor
int i = 0; // Variable for 'if' condiotion
int s = 0; // Variable for 'while loop'
int wait = 500; // delay time
int pir_sensor_value; // Variable for storing the input value of PIR sensor value
LiquidCrystal LCD1(13,A1,A2,A3,A4,A5); // Creates an LCD object. Parameters: (rs, enable, d4, d5, d6, d7) for first LCD
LiquidCrystal LCD2(2,3,4,5,6,7); // Creates an LCD object. Parameters: (rs, enable, d4, d5, d6, d7) for second LCD
void setup()
{
LCD1.begin(16,2); // Initialize first LiquidCrystal display
LCD2.begin(16,2); // Initialize second LiquidCrystal display
pinMode(tmp_36, INPUT); // Set Temperature sensor pin as an INPUT pin
pinMode(trigPin, OUTPUT); // Set Trigger pin of ultrasonic sensor as an OUTPUT pin
pinMode(echoPin, INPUT); // Set Echo pin of ultrasonic sensor as an INPUT pin
pinMode(pir_sensor, INPUT); // Set PIR sensor pin as an INPUT pin
pinMode(Buzzer, OUTPUT); // Set Buzzer pin as an OUTPUT pin
pinMode(Motor, OUTPUT); // Set Electric Motor pin as an OUTPUT pin
pinMode(Led, OUTPUT); // Set LED pin as an OUTPUT pin
}
void loop()
{
pir_sensor_value = digitalRead(pir_sensor); // // See if PIR sensor senses or not
if (pir_sensor_value == HIGH || i == 1)
{
while(s<1)
{
LCD2.print("Alert"); // Print the text .Alert' on second LCD
delay(wait);
LCD2.clear();
s=1;
}
digitalWrite(trigPin, LOW); // Clears the trigPin condition
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // Sets the trigPin HIGH (ACTIVE) for 10 microseconds
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
distance_in_cm = duration*0.0343;
distance_in_cm = distance_in_cm/2; // Calculating the distance in centimeters
distance_in_inches = distance_in_cm * 0.3937; // Calculating the distance in inches
temperature = analogRead(tmp_36); //getting the voltage reading from the temperature sensor
voltage = temperature * 0.0048828125; // converting that reading to voltage
temp_in_celsius = (voltage - 0.5) * 100; //converting from 10 mv per degree with 500 mV offset
//to degrees ((voltage - 500mV) times 100)
temp_in_fahernheit = (temp_in_celsius * 9.0 / 5.0) + 32.0; // now convert to Fahrenheit
if (distance_in_cm < 30) // when the ultrasonic distance is less than 30
{
LCD1.print("Temp.C :");
LCD1.print(temp_in_celsius); // Print the temperature value in Celsius
LCD1.setCursor(0,1);
LCD1.print("Temp.F :");
LCD1.print(temp_in_fahernheit); // Print the temperature value in Celsius
LCD2.print("Distance: ");
LCD2 .print(distance_in_cm); // Print the distance of ultrasonic sensor in Centimeters
LCD2.print("cm");
LCD2.setCursor(0,1);
LCD2.print("Distance: ");
LCD2 .print(distance_in_inches); // Print the distance of ultrasonic sensor in Inches
LCD2.print("in");
delay(wait);
LCD2.clear();
LCD1.clear();
if ( temp_in_celsius > 37.5) // When temperature is greater than 37.5 degree celsius
{
digitalWrite(Buzzer, HIGH); // Buzzer will be turned on
digitalWrite(Led, HIGH); // LED will be turned on
digitalWrite(Motor, LOW); // Motor will stay off
}
else
{
digitalWrite(Buzzer, LOW); // Buzzer will stay off
digitalWrite(Led, LOW); // LED will stay off
digitalWrite(Motor, HIGH); // Motor willbe turned on
}
}
else
{
LCD1.print("");
LCD1.setCursor(0,1);
LCD1.print("");
LCD2.print("Distance: ");
LCD2 .print(distance_in_cm); // Print the distance of ultrasonic sensor in Centimeters
LCD2.print("cm");
LCD2.setCursor(0,1);
LCD2.print("Distance: ");
LCD2 .print(distance_in_inches); // Print the distance of ultrasonic sensor in Inches
LCD2.print("in");
delay(wait);
LCD1.clear();
LCD2.clear();
}
i=1;
}
else
{
i=0;
}
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)


















{kind=link}
Comments
Please log in or sign up to comment.