




Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
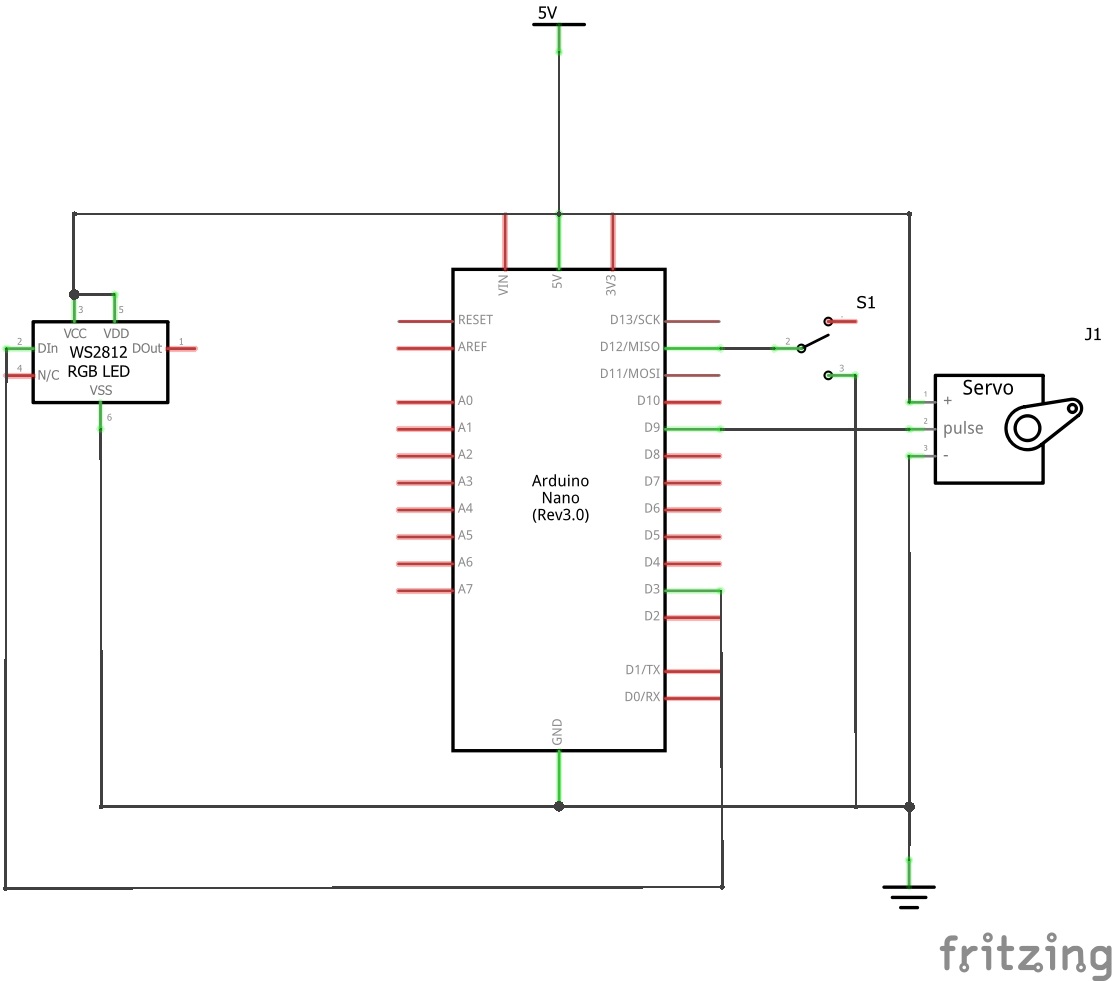
Simple useless box made with Arduino, one servo motor and CJMCU-2812-24 LED driver board to show the current "mood" of the box.
1 / 4 • Inside the box
The dimensions of the box are 29x15.5x1.6 cm. It has 2 semi-see trough plastics with hinges connecting them to the box. Inside is a servo motor with 3D printed hand and casing that is glued to the walls. Unfortunately I don't have the 3D printer files for the hand and casing, they were not done by me. LED driver board is also used to display the "mood" of the box. The whole thing is powered by an external power source, do not power the servo and led driver trough the 5V pin of the Arduino, it will draw too much current.
Libraries used:
Arduino code V2
C/C++Sequential animations, resets after 10 seconds of inactivity. Made mainly for faires. Light flicker fixed.
#include <VarSpeedServo.h>
#include <FastLED.h>
#define DATA_PIN 3
#define switchpin 2
#define servopin 11
#define NUM_LEDS 24
uint8_t i;
VarSpeedServo lid;
CRGB leds[NUM_LEDS];
void setup() {
FastLED.addLeds<NEOPIXEL, DATA_PIN>(leds, NUM_LEDS);
pinMode(switchpin, INPUT_PULLUP);
setPwmFrequency(DATA_PIN, 1); //Reduces LED flicker
for(i = 0; i < 24; i++) leds[i] = CRGB::Green;
FastLED.setBrightness(255);
FastLED.show();
lid.attach(servopin);
closelid(255);
}
void(* resetFunc) (void) = 0;
void loop() {
while(digitalRead(switchpin));
openlid(255);
while(!digitalRead(switchpin));
delay(300);
closelid(255);
anim(255, 65, 5);
resetck();
while(digitalRead(switchpin));
openlid(40);
delay(800);
closelid(255);
anim(80, 45, 15);
resetck();
while(digitalRead(switchpin));
FastLED.setBrightness(45);
FastLED.show();
delay(450);
FastLED.setBrightness(0);
FastLED.show();
delay(1000);
openlid(255);
while(!digitalRead(switchpin));
delay(300);
closelid(255);
delay(500);
for(i = 0; i < 24; i++) leds[i] = CRGB::Yellow;
FastLED.setBrightness(255);
FastLED.show();
resetck();
while(digitalRead(switchpin));
lid.write(95,25,true);
delay(950);
openlid(255);
while(!digitalRead(switchpin));
delay(300);
closelid(255);
resetck();
anim(130, 80, 0);
while(digitalRead(switchpin));
delay(1500);
openlid(255);
while(!digitalRead(switchpin));
delay(300);
closelid(150);
for(i = 0; i < 24; i++) leds[i] = CRGB::Orange;
FastLED.setBrightness(80);
FastLED.show();
resetck();
while(digitalRead(switchpin));
lid.write(110,255,true);
delay(800);
openlid(20);
delay(800);
lid.write(110,25,true);
delay(800);
FastLED.setBrightness(40);
FastLED.show();
delay(800);
closelid(255);
resetck();
while(digitalRead(switchpin));
openlid(255);
while(!digitalRead(switchpin));
delay(300);
closelid(255);
anim(40, 0, 15);
for(i = 0; i < 24; i++) leds[i] = CRGB::Red;
animp(0, 40, 15);
resetck();
while(digitalRead(switchpin));
delay(1500);
FastLED.setBrightness(0);
FastLED.show();
delay(1250);
FastLED.setBrightness(100);
FastLED.show();
openlid(255);
delay(1500);
closelid(255);
resetck();
while(digitalRead(switchpin));
delay(1500);
FastLED.setBrightness(255);
FastLED.show();
delay(850);
openlid(255);
while(!digitalRead(switchpin));
delay(300);
lid.write(90, 10, true);
delay(800);
openlid(255);
delay(250);
lid.write(90, 10, true);
delay(800);
openlid(255);
delay(1000);
closelid(255);
resetck();
while(digitalRead(switchpin));
delay(850);
for(i = 0; i < 24; i++) leds[i] = CRGB::Green;
FastLED.show();
delay(1500);
for(i = 0; i < 24; i++) leds[i] = CRGB::Red;
openlid(255);
FastLED.show();
openlid(255);
while(!digitalRead(switchpin));
delay(300);
closelid(10);
resetck();
while(digitalRead(switchpin));
openlid(255);
while(!digitalRead(switchpin));
delay(300);
closelid(255);
delay(800);
resetck();
while(digitalRead(switchpin));
delay(250);
FastLED.setBrightness(100);
FastLED.show();
delay(850);
openlid(255);
while(!digitalRead(switchpin));
delay(300);
closelid(255);
resetck();
while(digitalRead(switchpin));
delay(250);
anim(100, 23, 20);
openlid(45);
delay(1250);
closelid(45);
delay(1250);
resetck();
while(digitalRead(switchpin));
openlid(10);
delay(1500);
anim(23, 0, 20);
delay(1500);
closelid(10);
delay(1500);
for(i = 0; i < 24; i++) leds[i] = CRGB::Green;
FastLED.setBrightness(25);
FastLED.show();
delay(650);
FastLED.setBrightness(80);
FastLED.show();
delay(650);
FastLED.setBrightness(140);
FastLED.show();
delay(650);
FastLED.setBrightness(170);
FastLED.show();
delay(650);
FastLED.setBrightness(210);
FastLED.show();
delay(650);
FastLED.setBrightness(255);
FastLED.show();
delay(650);
openlid(255);
delay(1000);
closelid(255);
}
void closelid(byte recv){
lid.write(170,recv,true);
}
void openlid(byte recv){
lid.write(65,recv,true);
}
void anim(byte st, byte en, byte d){
for(i = st; i != en; i--){
FastLED.setBrightness(i);
FastLED.show();
delay(d);
}
}
void animp(byte st, byte en, byte d){
for(i = st; i != en; i++){
FastLED.setBrightness(i);
FastLED.show();
delay(d);
}
}
void resetck(){
unsigned long lastmillis = millis();
while(digitalRead(switchpin)) if (millis() - lastmillis > 10000) resetFunc();
}
void setPwmFrequency(int pin, int divisor) {
byte mode;
if(pin == 5 || pin == 6 || pin == 9 || pin == 10) {
switch(divisor) {
case 1: mode = 0x01; break;
case 8: mode = 0x02; break;
case 64: mode = 0x03; break;
case 256: mode = 0x04; break;
case 1024: mode = 0x05; break;
default: return;
}
if(pin == 5 || pin == 6) {
TCCR0B = TCCR0B & 0b11111000 | mode;
} else {
TCCR1B = TCCR1B & 0b11111000 | mode;
}
} else if(pin == 3 || pin == 11) {
switch(divisor) {
case 1: mode = 0x01; break;
case 8: mode = 0x02; break;
case 32: mode = 0x03; break;
case 64: mode = 0x04; break;
case 128: mode = 0x05; break;
case 256: mode = 0x06; break;
case 1024: mode = 0x07; break;
default: return;
}
TCCR2B = TCCR2B & 0b11111000 | mode;
}
}
Arduino code
C/C++"The brain of the box". The control() function is somewhat bugy, that's something i'm not interested in fixing any time soon. If you have any ideas for this, i'm happy to hear them.
#include <VarSpeedServo.h>
#include <FastLED.h>
#define NUM_LEDS 24 //there are 24 leds on the driver board
#define DATA_PIN 3 //which is connected to the pin 3
uint8_t mood=0; //variable for mood control
unsigned rnd; //used for randomly choosing animations
VarSpeedServo lid; //i named the servo lid
CRGB leds[NUM_LEDS];
void setup() {
FastLED.addLeds<NEOPIXEL, DATA_PIN>(leds, NUM_LEDS); //applies to this driver board
pinMode(12,INPUT_PULLUP); //switch is connected to the pin 12/GND
lid.attach(9); //servo is connected to the pin 9
closelid(15); //close the lid with speed 15 (see the function below)
for(byte i=0;i<24;i++)leds[i] = CRGB::Blue; //set all leds to blue (in the buffer not yet shown)
FastLED.show(); //switch to the new led buffer (displays previously set blue leds)
while(digitalRead(12)); //do nothing until switch is flicked
openlid(255); //open the lid with speed 255 (see the function below)
delay(500); //essential delay until servo finishes its move
closelid(255);
for(byte i=255;i>0;i--){ //lower the brightness incrementally
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
control(); //This function is used to control the "mood" of the box
}
void loop() {
if(!digitalRead(12)){
rnd=(random(800)); //generates a random number and falls into one of the animations
if(rnd>=0 && rnd<50){
openlid(150);
delay(500);
closelid(255);
mood+=10;
}
if(rnd>=50 && rnd<75){
lid.write(100,175,true);
delay(500);
lid.write(55,175,true);
delay(500);
openlid(255);
delay(500);
closelid(255);
mood+=10;
}
if(rnd>=75 && rnd<100){
lid.write(130,175,true);
delay(500);
lid.write(100,130,true);
delay(500);
lid.write(55,55,true);
delay(500);
closelid(75);
mood+=10;
}
if(rnd>=100 && rnd<125){
openlid(255);
delay(750);
closelid(50);
mood+=15;
}
if(rnd>=125 && rnd<150){
openlid(255);
delay(500);
lid.write(100,55,true);
delay(1000);
closelid(255);
mood+=15;
}
if(rnd>=150 && rnd<175){
delay(2000);
openlid(255);
delay(500);
closelid(255);
mood+=10;
}
if(rnd>=175 && rnd<200){
openlid(255);
delay(500);
closelid(255);
mood+=15;
}
if(rnd>=200 && rnd<225){
lid.write(65,175,true);
delay(500);
openlid(255);
delay(500);
closelid(255);
mood+=15;
}
if(rnd>=250 && rnd<275){
lid.write(100,200,true);
delay(750);
lid.write(168,255,true);
delay(500);
closelid(200);
mood+=15;
}
if(rnd>=225 && rnd<250){
lid.write(168,200,true);
delay(750);
lid.write(0,50,true);
delay(500);
closelid(250);
mood+=15;
}
if(rnd>=225 && rnd<250){
lid.write(100,255,true);
delay(700);
lid.write(130,235,true);
delay(700);
lid.write(150,120,true);
delay(700);
lid.write(168,100,true);
delay(400);
closelid(255);
mood+=25;
}
if(rnd>=275 && rnd<300){
lid.write(168,180,true);
delay(2000);
closelid(255);
mood+=25;
}
if(rnd>=300 && rnd<325){
lid.write(168,180,true);
delay(400);
lid.write(130,180,true);
closelid(255);
mood+=25;
}
if(rnd>=325 && rnd<350){
openlid(150);
delay(400);
lid.write(140,255,true);
delay(400);
openlid(150);
delay(400);
mood+=25;
closelid(255);
}
if(rnd>=350 && rnd<375){
openlid(150);
lid.write(140,255,true);
closelid(255);
mood+=25;
}
if(rnd>=375 && rnd<400){
openlid(150);
delay(1000);
lid.write(50,255,true);
delay(500);
openlid(150);
delay(1000);
closelid(255);
mood+=25;
}
if(rnd>=400 && rnd<450){
openlid(250);
lid.write(140,255);
closelid(40);
mood+=25;
}
if(rnd>=450 && rnd<475){
lid.write(150,150,true);
delay(500);
openlid(255);
delay(500);
closelid(255);
mood+=25;
}
if (rnd>=475 && rnd<500){
openlid(250);
delay(500);
lid.write(140,255);
delay(500);
closelid(40);
delay(500);
mood+=25;
}
if(rnd>=500){
openlid(255);
delay(500);
closelid(255);
}
control(); //Change the state of the LEDs
}
}
uint8_t control(){ //Changes the LED color and gives it an animation depening on mood value
if(mood>=0 && mood<=15){
for(byte i=0;i<24;i++)leds[i] = CRGB::Green;
for(byte i=0;i<255;i++){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
if (mood>=15 && mood<30){
for(byte i=0;i<24;i++)leds[i] = CRGB::Green;
for(byte i=255;i>200;i--){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
if (mood>=30 && mood<60){
for(byte i=0;i<24;i++)leds[i] = CRGB::Green;
for(byte i=200;i>130;i--){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
if (mood>=60 && mood<100){
for(byte i=0;i<24;i++)leds[i] = CRGB::Orange;
for(byte i=0;i<130;i++){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
if (mood>=100 && mood<130){
for(byte i=0;i<24;i++)leds[i] = CRGB::Orange;
for(byte i=130;i<200;i++){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
if (mood>=130 && mood<155){
for(byte i=0;i<24;i++) leds[i] = CRGB::Orange;
for(byte i=200;i<255;i++){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
if (mood>=155 && mood<180){
for(byte i=0;i<24;i++)leds[i] = CRGB::Orange;
for(byte i=255;i>75;i--){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
if (mood>=180 && mood<200){
for(byte i=0;i<24;i++)leds[i] = CRGB::Orange;
for(byte i=255;i>75;i--){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
if (mood>=200 && mood<225){
for(byte i=0;i<24;i++)leds[i] = CRGB::Red;
for(byte i=75;i<180;i++){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
if (mood>=225){
for(byte i=0;i<24;i++)leds[i] = CRGB::Red;
for(byte i=180;i<255;i++){
FastLED.setBrightness(i);
FastLED.show();
delay(5);
}
}
} //After mood hits overflow it goes back to zero, i never really was
//specially interested in fixing this function
void closelid(byte recv){ //function for closing the lid
lid.write(168,recv,true);
}
void openlid(byte recv){ //function for opening the lid
lid.write(42,recv,true);
}



{kind=link}
Comments
Please log in or sign up to comment.