






Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
Our project focuses on threat detection using machine learning and camera technology to safeguard your poultry, specifically from foxes and wolves. We have developed a system that utilizes a camera placed near or within the chicken coop to detect potential predators and alert the user through a smartphone application connected to an Arduino via Bluetooth.
Why We Decided to Make ItWe were motivated to create this project to address the need for an effective and automated solution to protect poultry from predators. Traditional methods often fall short, and we wanted to leverage the power of machine learning and technology to provide a reliable and efficient way to safeguard valuable livestock.
How It WorksOur system operates by continuously monitoring the camera feed using machine learning algorithms specifically trained to detect the presence of foxes and wolves. When a potential threat is identified, the system triggers an alert that is sent to the user's smartphone via the connected Arduino. The user can then take appropriate action to secure their chickens and prevent any harm.
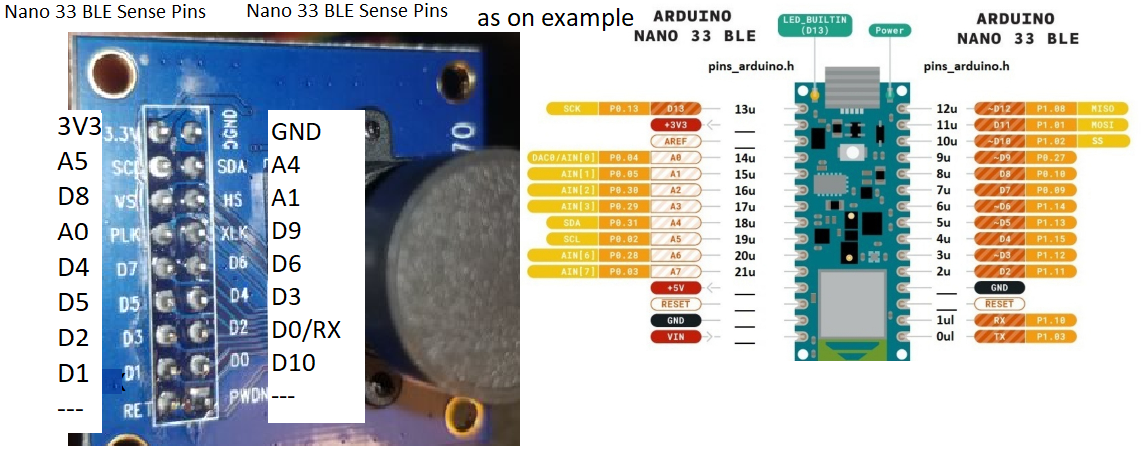
We used an Arduino Tiny Machine Learning Shield (part of the Arduino Tiny Machine Learning Kit) to connect the camera OV7675 to the Arduino Nano 33 BLE Sense board.
The functionality was programmed using the Edge Impulse web programming environment. We then downloaded the Arduino IDE library from the Edge Impulse web programming environment, where we added the functionality of turning the LED light on Arduino Nano 33 BLE Sense board green (if no predator is detected) or red (if a predator is detected) in the Arduino IDE programming environment.
The Android phone application was programmed in the Android Studio programming environment. We used the code available at the following link: https://github.com/MatthiasKerat/BLETutorialYt/tree/FinalApp and modified it according to our needs.
How to use itStep one: Connect to Arduino Nano 33 BLE Sense board using App created in Android Studio via Bluetooth.
Step two: The connection to the phone is successful when the application window appears as shown in the picture below. It is then ready to use. In the case where no predator was detected, the green light on the Arduino Nano 33 BLE Sense board lit up and the string "Nothing detected" was displayed on the app.
Step three: We tested the project on Google images of foxes and wolves. When we pointed the camera towards the computer screen where there was a fox, the string "fox" was displayed on the app, and the red light on the Arduino Nano 33 BLE Sense board also lit up.
In the case where we pointed the camera towards the computer screen where there was a wolf, the string "wolf" was displayed on the app.
/* Edge Impulse ingestion SDK
* Copyright (c) 2022 EdgeImpulse Inc.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*
*/
/* Includes ---------------------------------------------------------------- */
#include <projekt_inferencing.h>
#include <Arduino_OV767X.h> //Click here to get the library: http://librarymanager/All#Arduino_OV767X
#include <ArduinoBLE.h>
#include <stdint.h>
#include <stdlib.h>
/* Constant variables ------------------------------------------------------- */
#define EI_CAMERA_RAW_FRAME_BUFFER_COLS 160
#define EI_CAMERA_RAW_FRAME_BUFFER_ROWS 120
#define RED 22
#define GREEN 23
const char* SERVICE_UUID = "5e80f290-ee65-11ed-afc5-0800200c9a66";
const char* DETECTED_INFO_CHARACTERISTIC_UUID = "d0b8e840-ee65-11ed-afc5-0800200c9a66";
BLEService predatorDetectionService(SERVICE_UUID);
BLEUnsignedCharCharacteristic predatorDetectionCharacteristic(DETECTED_INFO_CHARACTERISTIC_UUID, BLERead | BLENotify);
#define DWORD_ALIGN_PTR(a) ((a & 0x3) ?(((uintptr_t)a + 0x4) & ~(uintptr_t)0x3) : a)
/*
** NOTE: If you run into TFLite arena allocation issue.
**
** This may be due to may dynamic memory fragmentation.
** Try defining "-DEI_CLASSIFIER_ALLOCATION_STATIC" in boards.local.txt (create
** if it doesn't exist) and copy this file to
** `<ARDUINO_CORE_INSTALL_PATH>/arduino/hardware/<mbed_core>/<core_version>/`.
**
** See
** (https://support.arduino.cc/hc/en-us/articles/360012076960-Where-are-the-installed-cores-located-)
** to find where Arduino installs cores on your machine.
**
** If the problem persists then there's not enough memory for this model and application.
*/
/* Edge Impulse ------------------------------------------------------------- */
class OV7675 : public OV767X {
public:
int begin(int resolution, int format, int fps);
void readFrame(void* buffer);
private:
int vsyncPin;
int hrefPin;
int pclkPin;
int xclkPin;
volatile uint32_t* vsyncPort;
uint32_t vsyncMask;
volatile uint32_t* hrefPort;
uint32_t hrefMask;
volatile uint32_t* pclkPort;
uint32_t pclkMask;
uint16_t width;
uint16_t height;
uint8_t bytes_per_pixel;
uint16_t bytes_per_row;
uint8_t buf_rows;
uint16_t buf_size;
uint8_t resize_height;
uint8_t *raw_buf;
void *buf_mem;
uint8_t *intrp_buf;
uint8_t *buf_limit;
void readBuf();
int allocate_scratch_buffs();
int deallocate_scratch_buffs();
};
typedef struct {
size_t width;
size_t height;
} ei_device_resize_resolutions_t;
/**
* @brief Check if new serial data is available
*
* @return Returns number of available bytes
*/
int ei_get_serial_available(void) {
return Serial.available();
}
/**
* @brief Get next available byte
*
* @return byte
*/
char ei_get_serial_byte(void) {
return Serial.read();
}
/* Private variables ------------------------------------------------------- */
static OV7675 Cam;
static bool is_initialised = false;
/*
** @brief points to the output of the capture
*/
static uint8_t *ei_camera_capture_out = NULL;
uint32_t resize_col_sz;
uint32_t resize_row_sz;
bool do_resize = false;
bool do_crop = false;
static bool debug_nn = false; // Set this to true to see e.g. features generated from the raw signal
/* Function definitions ------------------------------------------------------- */
bool ei_camera_init(void);
void ei_camera_deinit(void);
bool ei_camera_capture(uint32_t img_width, uint32_t img_height, uint8_t *out_buf) ;
int calculate_resize_dimensions(uint32_t out_width, uint32_t out_height, uint32_t *resize_col_sz, uint32_t *resize_row_sz, bool *do_resize);
void resizeImage(int srcWidth, int srcHeight, uint8_t *srcImage, int dstWidth, int dstHeight, uint8_t *dstImage, int iBpp);
void cropImage(int srcWidth, int srcHeight, uint8_t *srcImage, int startX, int startY, int dstWidth, int dstHeight, uint8_t *dstImage, int iBpp);
int bytesPerFrame;
byte data[320 * 240 * 2];
long previousMillis = 0;
/**
* @brief Arduino setup function
*/
void setup()
{
// put your setup code here, to run once:
Serial.begin(115200);
// comment out the below line to cancel the wait for USB connection (needed for native USB)
while (!Serial);
Serial.println("Edge Impulse Inferencing Demo");
if (!BLE.begin()) {
Serial.println("Starting BLE failed!");
while (1);
}
BLE.setLocalName("PredatorDetection");
BLE.setAdvertisedService(predatorDetectionService);
predatorDetectionService.addCharacteristic(predatorDetectionCharacteristic);
BLE.addService(predatorDetectionService);
predatorDetectionCharacteristic.writeValue(5);
BLE.advertise();
Serial.println("BLE Ready!");
pinMode(RED, OUTPUT);
pinMode(GREEN, OUTPUT);
digitalWrite(RED, HIGH);
// summary of inferencing settings (from model_metadata.h)
ei_printf("Inferencing settings:\n");
ei_printf("\tImage resolution: %dx%d\n", EI_CLASSIFIER_INPUT_WIDTH, EI_CLASSIFIER_INPUT_HEIGHT);
ei_printf("\tFrame size: %d\n", EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE);
ei_printf("\tNo. of classes: %d\n", sizeof(ei_classifier_inferencing_categories) / sizeof(ei_classifier_inferencing_categories[0]));
}
/**
* @brief Get data and run inferencing
*
* @param[in] debug Get debug info if true
*/
void loop()
{
bool stop_inferencing = false;
BLEDevice central = BLE.central();
if (central){
Serial.print("Connected to central: ");
Serial.println(central.address());
while(central.connected()) {
long currentMillis = millis();
if (currentMillis - previousMillis >= 5000){
previousMillis = currentMillis;
ei_printf("\nStarting inferencing in 2 seconds...\n");
// instead of wait_ms, we'll wait on the signal, this allows threads to cancel us...
//if (ei_sleep(2000) != EI_IMPULSE_OK) {
// break;
//}
ei_printf("Taking photo...\n");
if (ei_camera_init() == false) {
ei_printf("ERR: Failed to initialize image sensor\r\n");
break;
}
// choose resize dimensions
uint32_t resize_col_sz;
uint32_t resize_row_sz;
bool do_resize = false;
int res = calculate_resize_dimensions(EI_CLASSIFIER_INPUT_WIDTH, EI_CLASSIFIER_INPUT_HEIGHT, &resize_col_sz, &resize_row_sz, &do_resize);
if (res) {
ei_printf("ERR: Failed to calculate resize dimensions (%d)\r\n", res);
break;
}
static void *snapshot_mem = NULL;
static uint8_t *snapshot_buf = NULL;
snapshot_mem = ei_malloc(resize_col_sz*resize_row_sz*2);
if(snapshot_mem == NULL) {
ei_printf("failed to create snapshot_mem\r\n");
break;
}
snapshot_buf = (uint8_t *)DWORD_ALIGN_PTR((uintptr_t)snapshot_mem);
if (ei_camera_capture(EI_CLASSIFIER_INPUT_WIDTH, EI_CLASSIFIER_INPUT_HEIGHT, snapshot_buf) == false) {
ei_printf("Failed to capture image\r\n");
if (snapshot_mem) ei_free(snapshot_mem);
break;
}
ei::signal_t signal;
signal.total_length = EI_CLASSIFIER_INPUT_WIDTH * EI_CLASSIFIER_INPUT_HEIGHT;
signal.get_data = &ei_camera_cutout_get_data;
// run the impulse: DSP, neural network and the Anomaly algorithm
static ei_impulse_result_t result = { 0 };
EI_IMPULSE_ERROR ei_error = run_classifier(&signal, &result, debug_nn);
if (ei_error != EI_IMPULSE_OK) {
ei_printf("Failed to run impulse (%d)\n", ei_error);
ei_free(snapshot_mem);
break;
}
// print the predictions
ei_printf("Predictions (DSP: %d ms., Classification: %d ms., Anomaly: %d ms.): \n",
result.timing.dsp, result.timing.classification, result.timing.anomaly);
#if EI_CLASSIFIER_OBJECT_DETECTION == 1
bool bb_found = result.bounding_boxes[0].value > 0;
for (size_t ix = 0; ix < result.bounding_boxes_count; ix++) {
auto bb = result.bounding_boxes[ix];
if (bb.value == 0) {
continue;
}
ei_printf(" %s (%f) [ x: %u, y: %u, width: %u, height: %u ]\n", bb.label, bb.value, bb.x, bb.y, bb.width, bb.height);
predatorDetectionCharacteristic.writeValue(atoi(bb.label));
if (bb.label == "1") {
ei_printf("Fox");
digitalWrite(RED, LOW);
digitalWrite(GREEN, HIGH);
} else if (bb.label == "2"){
ei_printf("Wolf");
digitalWrite(RED, LOW);
digitalWrite(GREEN, HIGH);
} else{
ei_printf("Nothing / chicken");
digitalWrite(GREEN, LOW);
digitalWrite(RED, HIGH);
}
}
if (!bb_found) {
ei_printf(" No objects found\n");
predatorDetectionCharacteristic.writeValue(0);
digitalWrite(GREEN, LOW);
digitalWrite(RED, HIGH);
}
#else
for (size_t ix = 0; ix < EI_CLASSIFIER_LABEL_COUNT; ix++) {
ei_printf(" %s: %.5f\n", result.classification[ix].label,
result.classification[ix].value);
}
#if EI_CLASSIFIER_HAS_ANOMALY == 1
ei_printf(" anomaly score: %.3f\n", result.anomaly);
#endif
#endif
while (ei_get_serial_available() > 0) {
if (ei_get_serial_byte() == 'b') {
ei_printf("Inferencing stopped by user\r\n");
stop_inferencing = true;
}
}
if (snapshot_mem){
ei_free(snapshot_mem);
}
}
}
ei_printf("LOOP END\n");
ei_camera_deinit();
Serial.print("Disconnected from central: ");
Serial.println(central.address());
}
}
/**
* @brief Determine whether to resize and to which dimension
*
* @param[in] out_width width of output image
* @param[in] out_height height of output image
* @param[out] resize_col_sz pointer to frame buffer's column/width value
* @param[out] resize_row_sz pointer to frame buffer's rows/height value
* @param[out] do_resize returns whether to resize (or not)
*
*/
int calculate_resize_dimensions(uint32_t out_width, uint32_t out_height, uint32_t *resize_col_sz, uint32_t *resize_row_sz, bool *do_resize)
{
size_t list_size = 2;
const ei_device_resize_resolutions_t list[list_size] = { {42,32}, {128,96} };
// (default) conditions
*resize_col_sz = EI_CAMERA_RAW_FRAME_BUFFER_COLS;
*resize_row_sz = EI_CAMERA_RAW_FRAME_BUFFER_ROWS;
*do_resize = false;
for (size_t ix = 0; ix < list_size; ix++) {
if ((out_width <= list[ix].width) && (out_height <= list[ix].height)) {
*resize_col_sz = list[ix].width;
*resize_row_sz = list[ix].height;
*do_resize = true;
break;
}
}
return 0;
}
/**
* @brief Setup image sensor & start streaming
*
* @retval false if initialisation failed
*/
bool ei_camera_init(void) {
if (is_initialised) return true;
if (!Cam.begin(QQVGA, RGB565, 1)) { // VGA downsampled to QQVGA (OV7675)
ei_printf("ERR: Failed to initialize camera\r\n");
return false;
}
is_initialised = true;
return true;
}
/**
* @brief Stop streaming of sensor data
*/
void ei_camera_deinit(void) {
if (is_initialised) {
Cam.end();
is_initialised = false;
}
}
/**
* @brief Capture, rescale and crop image
*
* @param[in] img_width width of output image
* @param[in] img_height height of output image
* @param[in] out_buf pointer to store output image, NULL may be used
* when full resolution is expected.
*
* @retval false if not initialised, image captured, rescaled or cropped failed
*
*/
bool ei_camera_capture(uint32_t img_width, uint32_t img_height, uint8_t *out_buf)
{
if (!is_initialised) {
ei_printf("ERR: Camera is not initialized\r\n");
return false;
}
if (!out_buf) {
ei_printf("ERR: invalid parameters\r\n");
return false;
}
// choose resize dimensions
int res = calculate_resize_dimensions(img_width, img_height, &resize_col_sz, &resize_row_sz, &do_resize);
if (res) {
ei_printf("ERR: Failed to calculate resize dimensions (%d)\r\n", res);
return false;
}
if ((img_width != resize_col_sz)
|| (img_height != resize_row_sz)) {
do_crop = true;
}
Cam.readFrame(out_buf); // captures image and resizes
if (do_crop) {
uint32_t crop_col_sz;
uint32_t crop_row_sz;
uint32_t crop_col_start;
uint32_t crop_row_start;
crop_row_start = (resize_row_sz - img_height) / 2;
crop_col_start = (resize_col_sz - img_width) / 2;
crop_col_sz = img_width;
crop_row_sz = img_height;
//ei_printf("crop cols: %d, rows: %d\r\n", crop_col_sz,crop_row_sz);
cropImage(resize_col_sz, resize_row_sz,
out_buf,
crop_col_start, crop_row_start,
crop_col_sz, crop_row_sz,
out_buf,
16);
}
// The following variables should always be assigned
// if this routine is to return true
// cutout values
//ei_camera_snapshot_is_resized = do_resize;
//ei_camera_snapshot_is_cropped = do_crop;
ei_camera_capture_out = out_buf;
return true;
}
/**
* @brief Convert RGB565 raw camera buffer to RGB888
*
* @param[in] offset pixel offset of raw buffer
* @param[in] length number of pixels to convert
* @param[out] out_buf pointer to store output image
*/
int ei_camera_cutout_get_data(size_t offset, size_t length, float *out_ptr) {
size_t pixel_ix = offset * 2;
size_t bytes_left = length;
size_t out_ptr_ix = 0;
// read byte for byte
while (bytes_left != 0) {
// grab the value and convert to r/g/b
uint16_t pixel = (ei_camera_capture_out[pixel_ix] << 8) | ei_camera_capture_out[pixel_ix+1];
uint8_t r, g, b;
r = ((pixel >> 11) & 0x1f) << 3;
g = ((pixel >> 5) & 0x3f) << 2;
b = (pixel & 0x1f) << 3;
// then convert to out_ptr format
float pixel_f = (r << 16) + (g << 8) + b;
out_ptr[out_ptr_ix] = pixel_f;
// and go to the next pixel
out_ptr_ix++;
pixel_ix+=2;
bytes_left--;
}
// and done!
return 0;
}
// This include file works in the Arduino environment
// to define the Cortex-M intrinsics
#ifdef __ARM_FEATURE_SIMD32
#include <device.h>
#endif
// This needs to be < 16 or it won't fit. Cortex-M4 only has SIMD for signed multiplies
#define FRAC_BITS 14
#define FRAC_VAL (1<<FRAC_BITS)
#define FRAC_MASK (FRAC_VAL - 1)
//
// Resize
//
// Assumes that the destination buffer is dword-aligned
// Can be used to resize the image smaller or larger
// If resizing much smaller than 1/3 size, then a more rubust algorithm should average all of the pixels
// This algorithm uses bilinear interpolation - averages a 2x2 region to generate each new pixel
//
// Optimized for 32-bit MCUs
// supports 8 and 16-bit pixels
void resizeImage(int srcWidth, int srcHeight, uint8_t *srcImage, int dstWidth, int dstHeight, uint8_t *dstImage, int iBpp)
{
uint32_t src_x_accum, src_y_accum; // accumulators and fractions for scaling the image
uint32_t x_frac, nx_frac, y_frac, ny_frac;
int x, y, ty, tx;
if (iBpp != 8 && iBpp != 16)
return;
src_y_accum = FRAC_VAL/2; // start at 1/2 pixel in to account for integer downsampling which might miss pixels
const uint32_t src_x_frac = (srcWidth * FRAC_VAL) / dstWidth;
const uint32_t src_y_frac = (srcHeight * FRAC_VAL) / dstHeight;
const uint32_t r_mask = 0xf800f800;
const uint32_t g_mask = 0x07e007e0;
const uint32_t b_mask = 0x001f001f;
uint8_t *s, *d;
uint16_t *s16, *d16;
uint32_t x_frac2, y_frac2; // for 16-bit SIMD
for (y=0; y < dstHeight; y++) {
ty = src_y_accum >> FRAC_BITS; // src y
y_frac = src_y_accum & FRAC_MASK;
src_y_accum += src_y_frac;
ny_frac = FRAC_VAL - y_frac; // y fraction and 1.0 - y fraction
y_frac2 = ny_frac | (y_frac << 16); // for M4/M4 SIMD
s = &srcImage[ty * srcWidth];
s16 = (uint16_t *)&srcImage[ty * srcWidth * 2];
d = &dstImage[y * dstWidth];
d16 = (uint16_t *)&dstImage[y * dstWidth * 2];
src_x_accum = FRAC_VAL/2; // start at 1/2 pixel in to account for integer downsampling which might miss pixels
if (iBpp == 8) {
for (x=0; x < dstWidth; x++) {
uint32_t tx, p00,p01,p10,p11;
tx = src_x_accum >> FRAC_BITS;
x_frac = src_x_accum & FRAC_MASK;
nx_frac = FRAC_VAL - x_frac; // x fraction and 1.0 - x fraction
x_frac2 = nx_frac | (x_frac << 16);
src_x_accum += src_x_frac;
p00 = s[tx]; p10 = s[tx+1];
p01 = s[tx+srcWidth]; p11 = s[tx+srcWidth+1];
#ifdef __ARM_FEATURE_SIMD32
p00 = __SMLAD(p00 | (p10<<16), x_frac2, FRAC_VAL/2) >> FRAC_BITS; // top line
p01 = __SMLAD(p01 | (p11<<16), x_frac2, FRAC_VAL/2) >> FRAC_BITS; // bottom line
p00 = __SMLAD(p00 | (p01<<16), y_frac2, FRAC_VAL/2) >> FRAC_BITS; // combine
#else // generic C code
p00 = ((p00 * nx_frac) + (p10 * x_frac) + FRAC_VAL/2) >> FRAC_BITS; // top line
p01 = ((p01 * nx_frac) + (p11 * x_frac) + FRAC_VAL/2) >> FRAC_BITS; // bottom line
p00 = ((p00 * ny_frac) + (p01 * y_frac) + FRAC_VAL/2) >> FRAC_BITS; // combine top + bottom
#endif // Cortex-M4/M7
*d++ = (uint8_t)p00; // store new pixel
} // for x
} // 8-bpp
else
{ // RGB565
for (x=0; x < dstWidth; x++) {
uint32_t tx, p00,p01,p10,p11;
uint32_t r00, r01, r10, r11, g00, g01, g10, g11, b00, b01, b10, b11;
tx = src_x_accum >> FRAC_BITS;
x_frac = src_x_accum & FRAC_MASK;
nx_frac = FRAC_VAL - x_frac; // x fraction and 1.0 - x fraction
x_frac2 = nx_frac | (x_frac << 16);
src_x_accum += src_x_frac;
p00 = __builtin_bswap16(s16[tx]); p10 = __builtin_bswap16(s16[tx+1]);
p01 = __builtin_bswap16(s16[tx+srcWidth]); p11 = __builtin_bswap16(s16[tx+srcWidth+1]);
#ifdef __ARM_FEATURE_SIMD32
{
p00 |= (p10 << 16);
p01 |= (p11 << 16);
r00 = (p00 & r_mask) >> 1; g00 = p00 & g_mask; b00 = p00 & b_mask;
r01 = (p01 & r_mask) >> 1; g01 = p01 & g_mask; b01 = p01 & b_mask;
r00 = __SMLAD(r00, x_frac2, FRAC_VAL/2) >> FRAC_BITS; // top line
r01 = __SMLAD(r01, x_frac2, FRAC_VAL/2) >> FRAC_BITS; // bottom line
r00 = __SMLAD(r00 | (r01<<16), y_frac2, FRAC_VAL/2) >> FRAC_BITS; // combine
g00 = __SMLAD(g00, x_frac2, FRAC_VAL/2) >> FRAC_BITS; // top line
g01 = __SMLAD(g01, x_frac2, FRAC_VAL/2) >> FRAC_BITS; // bottom line
g00 = __SMLAD(g00 | (g01<<16), y_frac2, FRAC_VAL/2) >> FRAC_BITS; // combine
b00 = __SMLAD(b00, x_frac2, FRAC_VAL/2) >> FRAC_BITS; // top line
b01 = __SMLAD(b01, x_frac2, FRAC_VAL/2) >> FRAC_BITS; // bottom line
b00 = __SMLAD(b00 | (b01<<16), y_frac2, FRAC_VAL/2) >> FRAC_BITS; // combine
}
#else // generic C code
{
r00 = (p00 & r_mask) >> 1; g00 = p00 & g_mask; b00 = p00 & b_mask;
r10 = (p10 & r_mask) >> 1; g10 = p10 & g_mask; b10 = p10 & b_mask;
r01 = (p01 & r_mask) >> 1; g01 = p01 & g_mask; b01 = p01 & b_mask;
r11 = (p11 & r_mask) >> 1; g11 = p11 & g_mask; b11 = p11 & b_mask;
r00 = ((r00 * nx_frac) + (r10 * x_frac) + FRAC_VAL/2) >> FRAC_BITS; // top line
r01 = ((r01 * nx_frac) + (r11 * x_frac) + FRAC_VAL/2) >> FRAC_BITS; // bottom line
r00 = ((r00 * ny_frac) + (r01 * y_frac) + FRAC_VAL/2) >> FRAC_BITS; // combine top + bottom
g00 = ((g00 * nx_frac) + (g10 * x_frac) + FRAC_VAL/2) >> FRAC_BITS; // top line
g01 = ((g01 * nx_frac) + (g11 * x_frac) + FRAC_VAL/2) >> FRAC_BITS; // bottom line
g00 = ((g00 * ny_frac) + (g01 * y_frac) + FRAC_VAL/2) >> FRAC_BITS; // combine top + bottom
b00 = ((b00 * nx_frac) + (b10 * x_frac) + FRAC_VAL/2) >> FRAC_BITS; // top line
b01 = ((b01 * nx_frac) + (b11 * x_frac) + FRAC_VAL/2) >> FRAC_BITS; // bottom line
b00 = ((b00 * ny_frac) + (b01 * y_frac) + FRAC_VAL/2) >> FRAC_BITS; // combine top + bottom
}
#endif // Cortex-M4/M7
r00 = (r00 << 1) & r_mask;
g00 = g00 & g_mask;
b00 = b00 & b_mask;
p00 = (r00 | g00 | b00); // re-combine color components
*d16++ = (uint16_t)__builtin_bswap16(p00); // store new pixel
} // for x
} // 16-bpp
} // for y
} /* resizeImage() */
//
// Crop
//
// Assumes that the destination buffer is dword-aligned
// optimized for 32-bit MCUs
// Supports 8 and 16-bit pixels
//
void cropImage(int srcWidth, int srcHeight, uint8_t *srcImage, int startX, int startY, int dstWidth, int dstHeight, uint8_t *dstImage, int iBpp)
{
uint32_t *s32, *d32;
int x, y;
if (startX < 0 || startX >= srcWidth || startY < 0 || startY >= srcHeight || (startX + dstWidth) > srcWidth || (startY + dstHeight) > srcHeight)
return; // invalid parameters
if (iBpp != 8 && iBpp != 16)
return;
if (iBpp == 8) {
uint8_t *s, *d;
for (y=0; y<dstHeight; y++) {
s = &srcImage[srcWidth * (y + startY) + startX];
d = &dstImage[(dstWidth * y)];
x = 0;
if ((intptr_t)s & 3 || (intptr_t)d & 3) { // either src or dst pointer is not aligned
for (; x<dstWidth; x++) {
*d++ = *s++; // have to do it byte-by-byte
}
} else {
// move 4 bytes at a time if aligned or alignment not enforced
s32 = (uint32_t *)s;
d32 = (uint32_t *)d;
for (; x<dstWidth-3; x+= 4) {
*d32++ = *s32++;
}
// any remaining stragglers?
s = (uint8_t *)s32;
d = (uint8_t *)d32;
for (; x<dstWidth; x++) {
*d++ = *s++;
}
}
} // for y
} // 8-bpp
else
{
uint16_t *s, *d;
for (y=0; y<dstHeight; y++) {
s = (uint16_t *)&srcImage[2 * srcWidth * (y + startY) + startX * 2];
d = (uint16_t *)&dstImage[(dstWidth * y * 2)];
x = 0;
if ((intptr_t)s & 2 || (intptr_t)d & 2) { // either src or dst pointer is not aligned
for (; x<dstWidth; x++) {
*d++ = *s++; // have to do it 16-bits at a time
}
} else {
// move 4 bytes at a time if aligned or alignment no enforced
s32 = (uint32_t *)s;
d32 = (uint32_t *)d;
for (; x<dstWidth-1; x+= 2) { // we can move 2 pixels at a time
*d32++ = *s32++;
}
// any remaining stragglers?
s = (uint16_t *)s32;
d = (uint16_t *)d32;
for (; x<dstWidth; x++) {
*d++ = *s++;
}
}
} // for y
} // 16-bpp case
} /* cropImage() */
#if !defined(EI_CLASSIFIER_SENSOR) || EI_CLASSIFIER_SENSOR != EI_CLASSIFIER_SENSOR_CAMERA
#error "Invalid model for current sensor"
#endif
// OV767X camera library override
#include <Arduino.h>
#include <Wire.h>
#define digitalPinToBitMask(P) (1 << (digitalPinToPinName(P) % 32))
#define portInputRegister(P) ((P == 0) ? &NRF_P0->IN : &NRF_P1->IN)
//
// OV7675::begin()
//
// Extends the OV767X library function. Some private variables are needed
// to use the OV7675::readFrame function.
//
int OV7675::begin(int resolution, int format, int fps)
{
pinMode(OV7670_VSYNC, INPUT);
pinMode(OV7670_HREF, INPUT);
pinMode(OV7670_PLK, INPUT);
pinMode(OV7670_XCLK, OUTPUT);
vsyncPort = portInputRegister(digitalPinToPort(OV7670_VSYNC));
vsyncMask = digitalPinToBitMask(OV7670_VSYNC);
hrefPort = portInputRegister(digitalPinToPort(OV7670_HREF));
hrefMask = digitalPinToBitMask(OV7670_HREF);
pclkPort = portInputRegister(digitalPinToPort(OV7670_PLK));
pclkMask = digitalPinToBitMask(OV7670_PLK);
// init driver to use full image sensor size
bool ret = OV767X::begin(VGA, format, fps);
width = OV767X::width(); // full sensor width
height = OV767X::height(); // full sensor height
bytes_per_pixel = OV767X::bytesPerPixel();
bytes_per_row = width * bytes_per_pixel; // each pixel is 2 bytes
resize_height = 2;
buf_mem = NULL;
raw_buf = NULL;
intrp_buf = NULL;
//allocate_scratch_buffs();
return ret;
} /* OV7675::begin() */
int OV7675::allocate_scratch_buffs()
{
//ei_printf("allocating buffers..\r\n");
buf_rows = height / resize_row_sz * resize_height;
buf_size = bytes_per_row * buf_rows;
buf_mem = ei_malloc(buf_size);
if(buf_mem == NULL) {
ei_printf("failed to create buf_mem\r\n");
return false;
}
raw_buf = (uint8_t *)DWORD_ALIGN_PTR((uintptr_t)buf_mem);
//ei_printf("allocating buffers OK\r\n");
return 0;
}
int OV7675::deallocate_scratch_buffs()
{
//ei_printf("deallocating buffers...\r\n");
ei_free(buf_mem);
buf_mem = NULL;
//ei_printf("deallocating buffers OK\r\n");
return 0;
}
//
// OV7675::readFrame()
//
// Overrides the OV767X library function. Fixes the camera output to be
// a far more desirable image. This image utilizes the full sensor size
// and has the correct aspect ratio. Since there is limited memory on the
// Nano we bring in only part of the entire sensor at a time and then
// interpolate to a lower resolution.
//
void OV7675::readFrame(void* buffer)
{
allocate_scratch_buffs();
uint8_t* out = (uint8_t*)buffer;
noInterrupts();
// Falling edge indicates start of frame
while ((*vsyncPort & vsyncMask) == 0); // wait for HIGH
while ((*vsyncPort & vsyncMask) != 0); // wait for LOW
int out_row = 0;
for (int raw_height = 0; raw_height < height; raw_height += buf_rows) {
// read in 640xbuf_rows buffer to work with
readBuf();
resizeImage(width, buf_rows,
raw_buf,
resize_col_sz, resize_height,
&(out[out_row]),
16);
out_row += resize_col_sz * resize_height * bytes_per_pixel; /* resize_col_sz * 2 * 2 */
}
interrupts();
deallocate_scratch_buffs();
} /* OV7675::readFrame() */
//
// OV7675::readBuf()
//
// Extends the OV767X library function. Reads buf_rows VGA rows from the
// image sensor.
//
void OV7675::readBuf()
{
int offset = 0;
uint32_t ulPin = 33; // P1.xx set of GPIO is in 'pin' 32 and above
NRF_GPIO_Type * port;
port = nrf_gpio_pin_port_decode(&ulPin);
for (int i = 0; i < buf_rows; i++) {
// rising edge indicates start of line
while ((*hrefPort & hrefMask) == 0); // wait for HIGH
for (int col = 0; col < bytes_per_row; col++) {
// rising edges clock each data byte
while ((*pclkPort & pclkMask) != 0); // wait for LOW
uint32_t in = port->IN; // read all bits in parallel
in >>= 2; // place bits 0 and 1 at the "bottom" of the register
in &= 0x3f03; // isolate the 8 bits we care about
in |= (in >> 6); // combine the upper 6 and lower 2 bits
raw_buf[offset++] = in;
while ((*pclkPort & pclkMask) == 0); // wait for HIGH
}
while ((*hrefPort & hrefMask) != 0); // wait for LOW
}
} /* OV7675::readBuf() */










{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.