





Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
Introduction
HuntSafe is a project made to protect hunters and hikers during hunting session.
The idea of this project was born during a discussion about the accident around hunting areas and how to avoid them.
Main Goal
Upgrade the conditions for the practice of hunting.
Use technologies related to modern IOT such as networks (TTN, Lora Wan).
Having a functional, stand-alone device link with the Hunt Safe App.
An application divided into 2 categories that could inform and warn hunters as well as residents of their presence around hunting areas.
The device is a connected safety lock wich can be unlocked only in approved hunting zone. It can provide a traceability of the use of the firearm and the owner if an accident occurs in that area.
How does it works
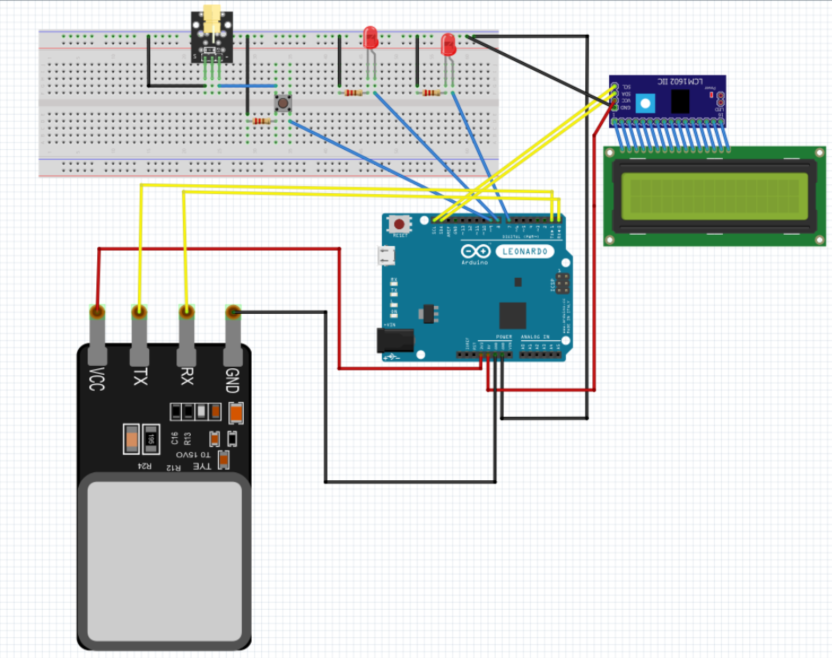
The Device
The project is build around two arduino card.
The first one contain the fingerprint sensor to confirm the identity of the owner of the firearm.
An LCD screen and two LED to confirm the use of the firearm.
Safety is disabled only if firing conditions are met.
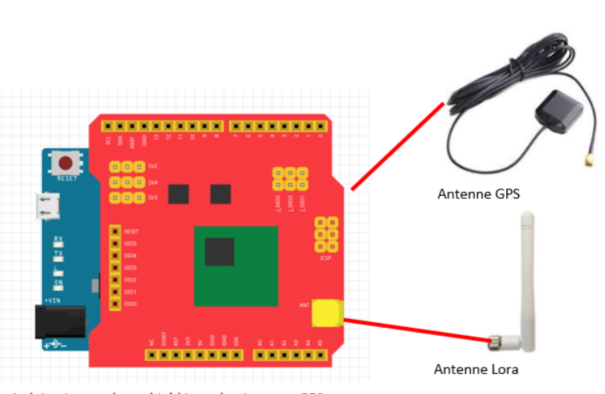
1. The first one is to be in a approved hunting area with the GPS data collected by the second Arduino Leonardo Card and send to the APP and compare to a white list of GPS Location.
If the gps location is in a hunting area.
The application server returns a boolean to the Arduino which validates the position.
The LCD Screen show if the GPS Location is OK or not.
2. The second one is link with the confirmation of the identity of the owner of the rifle. It is completed with the analys of the fingerprint of the hunter.
If both conditions are met, the weapon's connected safety is disabled, the hunter can use his weapon.
We can see three case were the security stay lock
The only case were the security lock is desactivate
A Laser LED link with a switch button reproduce the use of the firearm.
It can only fire when the green LED is on.
Future Improvement : Project HuntSafe V2
1. Changing the device
After consulting several gunsmiths and hunters.
The device will be modified to simplify its installation.
The idea of a connected trigger guard lock caught our attention.
It can also reduced the price of the device and be more accesible.
2. Creating an App to support the Device
An app could be devellop to add some feature that could be very usefull for hunters and resodent
It could be divided in two part, one for the hunters and one for the residents, joggers, hikers, horseriders near hunting areas.
1.1 Hunter Side App
- The list of available hunting areas as well as their markings.
- Consult if the hunting area is occupied or visited by hunters or residents
- Access to a FAQ related to malfunction of the device.
- Be alerted to specific events (storm alert, hunting area closure, infected animals, etc.)
- Propose a document portfolio related to the hunting license and license related to gun possessed by the hunter link with FranceConnect.
- Create a notification applied to the device of the connected rifle in order to warn the hunter of the presence of nearby residents (Alert by vibration and diode)
1.2 Resident Side App
- Allows residents near a hunting area to be notified of a hunting party.
- Warn hunters of the presence of residents using paths in the hunting area.
- Inform animals that can be encountered in this area and raise awareness of their presence.
- Be alerted to specific events (storm alert, hunting area closure, infected animals, etc.).
3. Upgrade the LoraWan
Include an antenna in the car that can be use to upgrade the coverage area if there is a bad condition (very dense forest, mountains ...)
Acknowledgements
We would like to thank our teachers at UniLaSalle Amiens and in particular Mr DAILLY, Mr CARON, Mr BRACQ and Mr POMPORTES who helped us in the realisation of our project, teaching us IOT as well as knowledge in the production and design of electronic cards.
{kind=link}
{kind=link}


Comments
Please log in or sign up to comment.