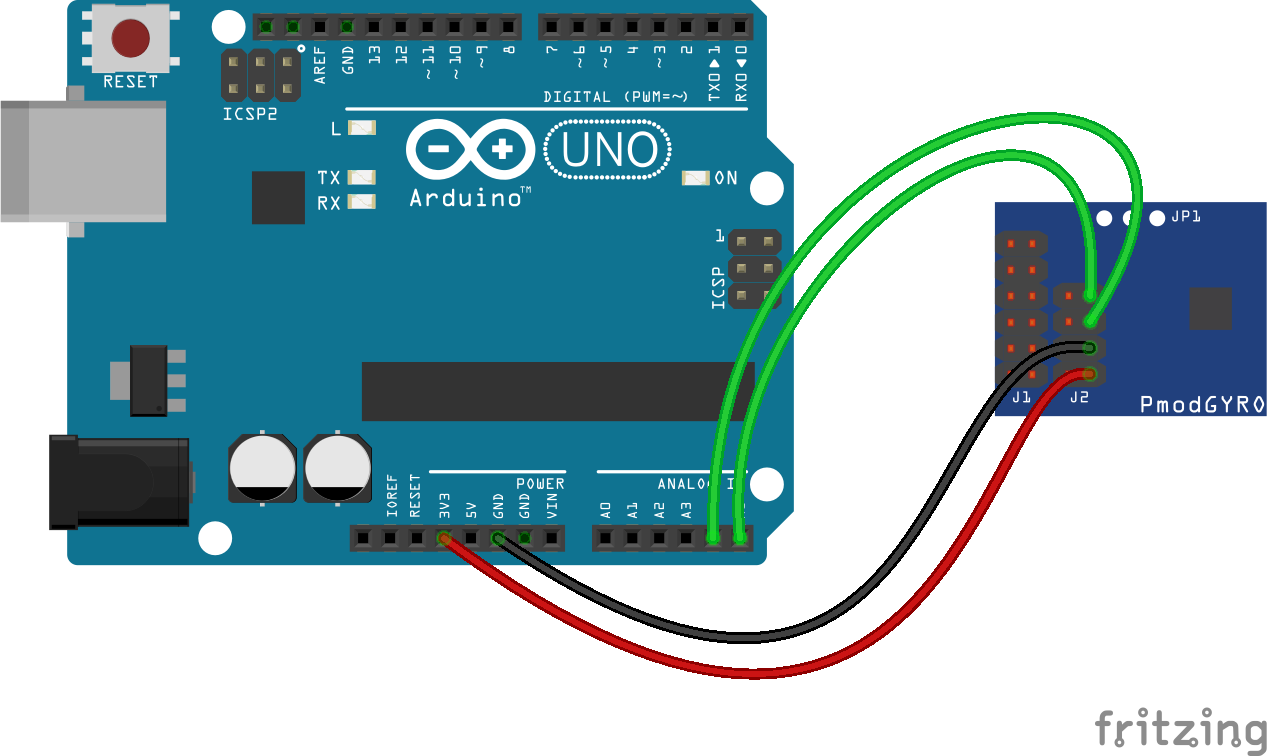
This is a demo project for the Pmod GYRO made by Digilent. The X, Y and Z components of the angular velocity are measured and displayed on the Serial monitor. To control the Pmod, an Arduino UNO is used, which also sends the data to the computer. To communicate with the peripheral device, I2C communication protocol is used, which is made simpler by the usage of the L3G4200D Arduino Library. Measurements are integrated to get the deviations from the initial position, then displayed with the help of the serial plotter.
Output of the Pmod GYRO test program




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




{kind=link}
Comments