



Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Introduction
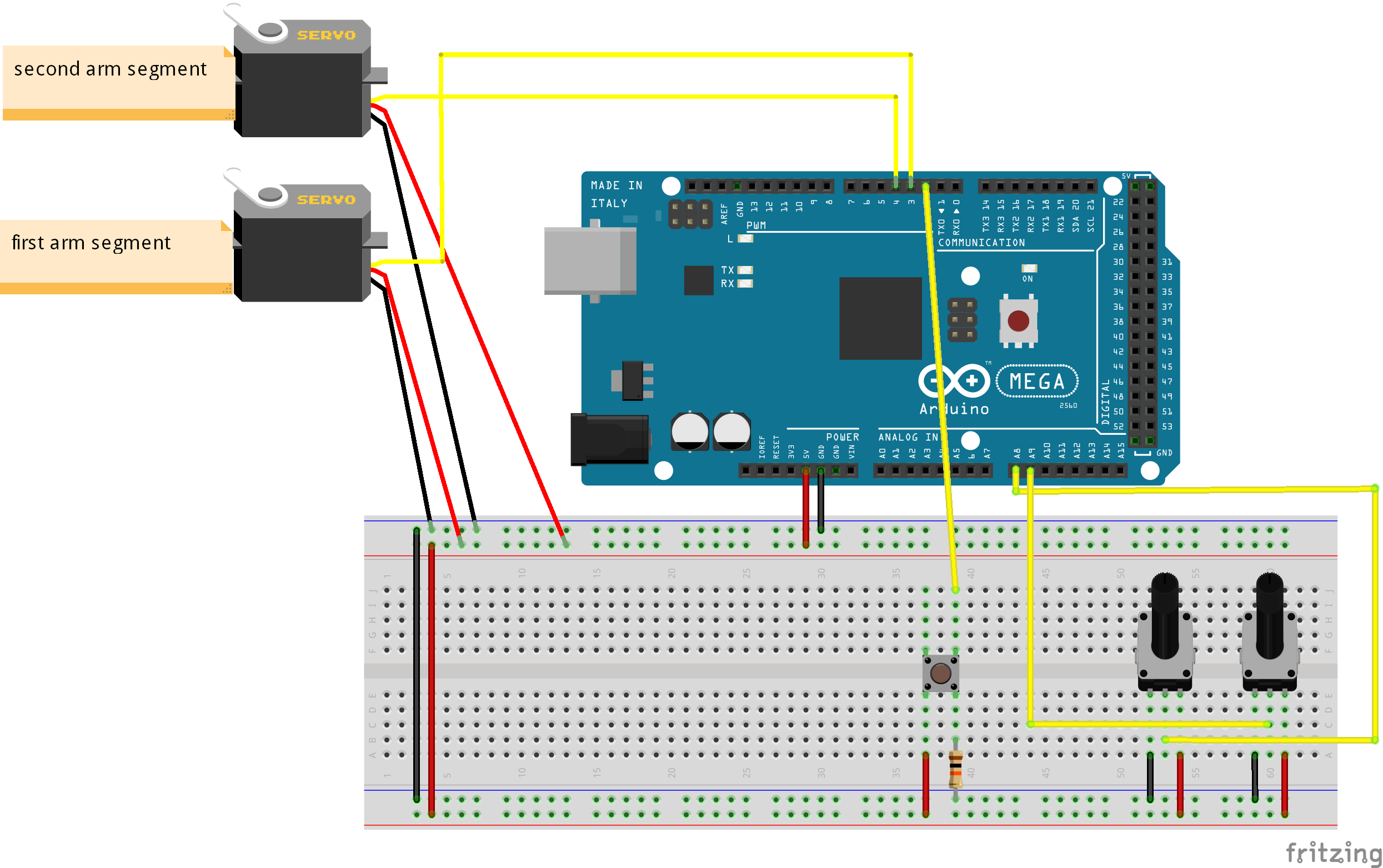
First arm segment
Second arm segment
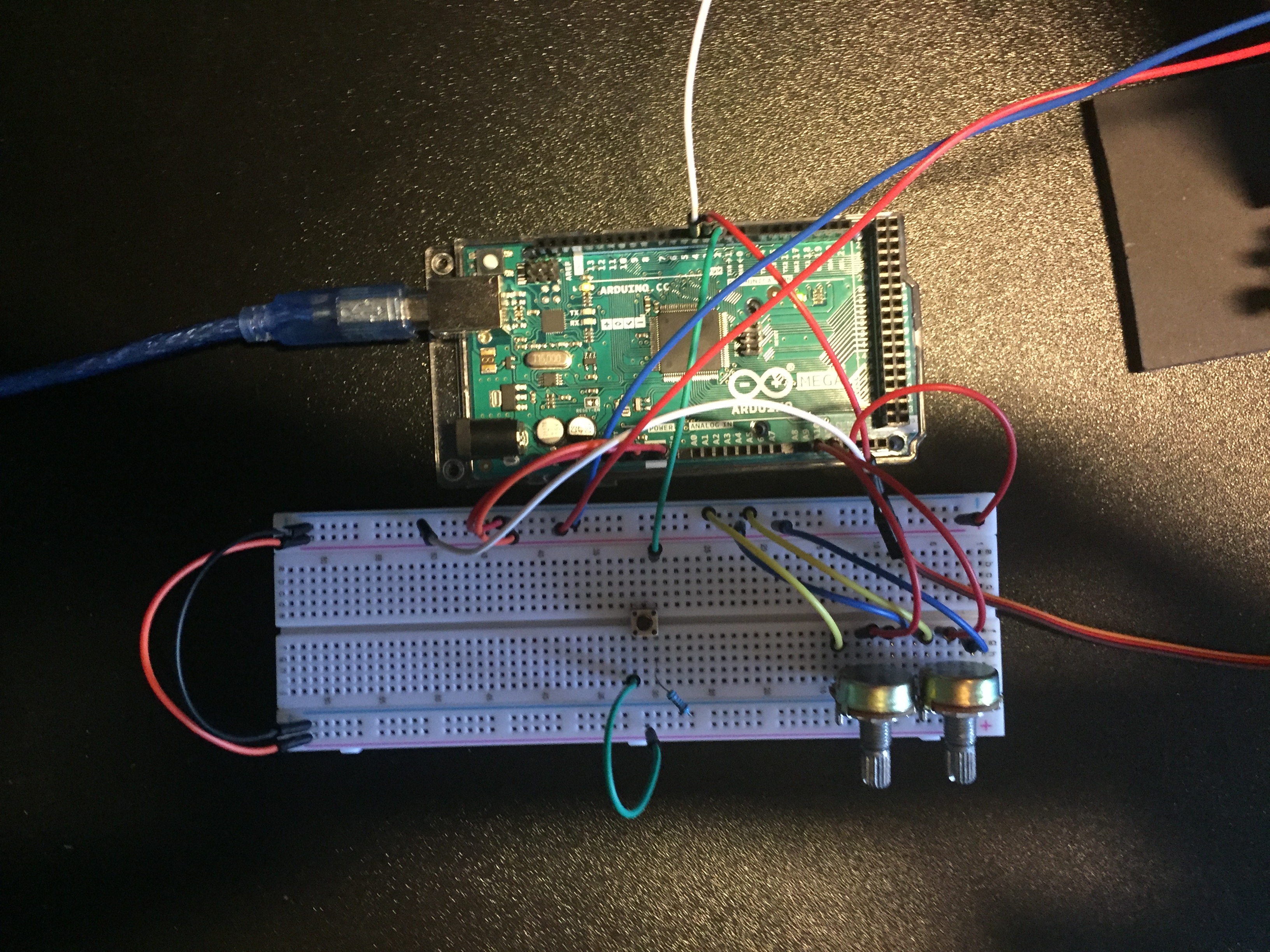
Read moreThis robot arm uses servo motors to move. At the end of it there is a marker. At first-you can turn potentiometer to move the arm. When it is in the position you want-press button and Arduino on serial monitor prints the positions of servos. Then run another sketch and put the values in it. Arm now moves it self on positions you want. Project is made using Arduino Mega 2560.
BaseBase where the servo motor is going to be placed
Servo holder
Servo placed on base using duck tape and zip tie
Base with servo thats moving arm segments
1 / 3 • First arm, on left-servo 'arm' thats move this, on right-servo for second arm segment
This is shorter because now I started to worry about the servo motor lifting power.
Marker at the end
Run the calibrating code to get servo values and then put them in the moving code.
_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.