/*
Amrendra Sahni (Gargi Memorial Institute Of Technology)
Guide: Bipasha Chakrabarti Banik (Assistant Prof. at Gargi Memorial Institute Of Technology)
*/
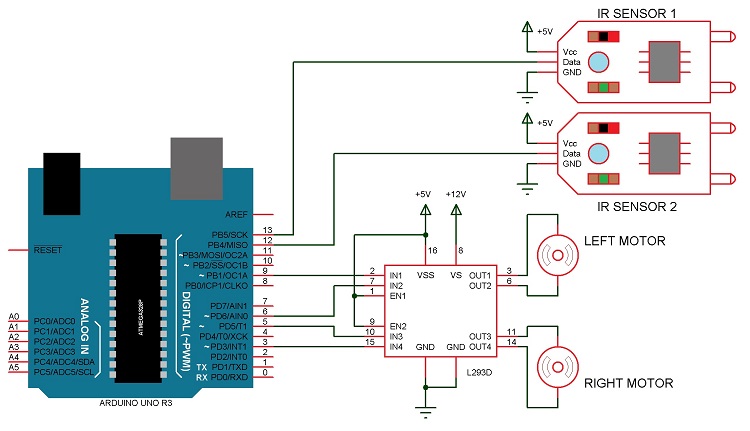
#define LS 2 // left sensor
#define RS 3 // right sensor
#define LM1 5 // left motor M1a
#define LM2 4 // left motor M2a
#define RM1 7 // right motor M2a
#define RM2 6 // right motor M2b
void setup()
{
pinMode(LS, INPUT);
pinMode(RS, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
}
void loop()
{
if(digitalRead(LS) && digitalRead(RS)) // Move Forward on line
{
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if(digitalRead(LS) && !(digitalRead(RS))) // turn left by rotationg left motors in forward and right ones in backward direction
{
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, HIGH);
}
if(!(digitalRead(LS)) && digitalRead(RS)) // Turn right by rotating right motors in forward and left ones in backward direction
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, HIGH);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if(!(digitalRead(LS)) && !(digitalRead(RS))) // Finish line, stop both the motors
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)



{kind=link}
Comments