


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 4 | ||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
Full story here: http://www.cesarebrizio.it/Arduino/Turntable.html
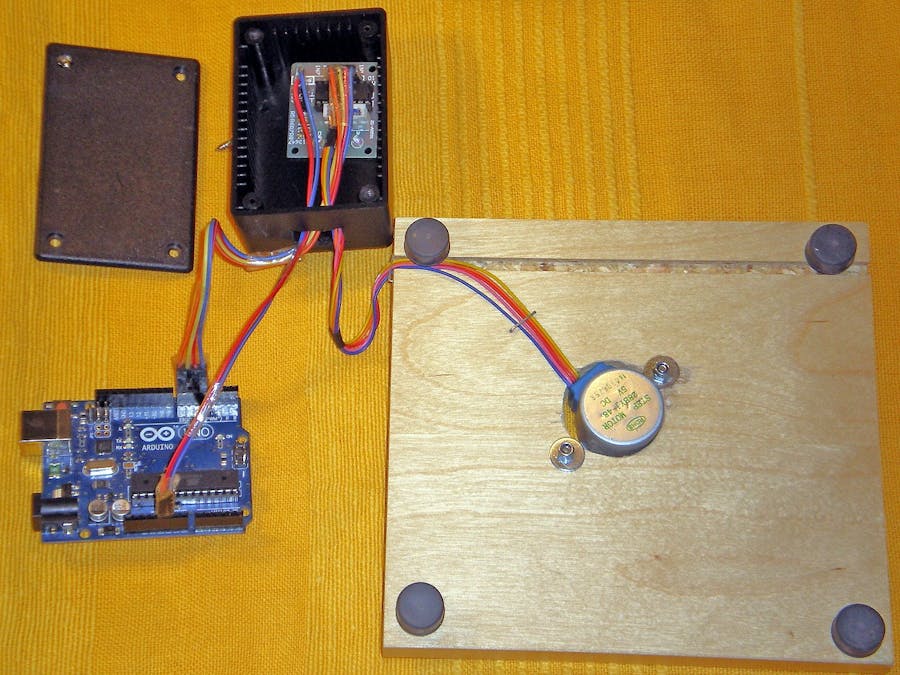
This project is about a rotating platform based on a stepper motor.
Stepper model is 28BYJ48, controlled via the X113647 stepper motor driver (based on the ULN2003A IC) normally purchased with the stepper.
The platform can rotate in both directions and is controlled via serial monitor or Tera Term.
The following commands are implemented:
- R = Rotate Clockwise continuously (meaning: for several turns)
- r = Rotate for 360deg; clockwise
- L = Rotate Counter-clockwise continuously (meaning: for several turns)
- l = Rotate for 360deg; counter-clockwise
- S = Stop rotating
From the mechanical point of view, the assembly is very simple: just a square of plywood or similar material, around 15cmx15cm size, is needed for the base table.
The center of the table will be found at the crossing of the diagonals - a 6mm hole will be drilled exactly at that point.
The stepper hub is off-center: by sticking the hub into the 6mm hole, the contour of the stepper can be drawn with a pencil.
Then, a round hole as tight as possible around the stepper contour will be cut by a fretsaw, so that the two fixing holes of the stepper sit firmly on the wood of the table, so that they can be used to fix the stepper to the table.
10mm high rubber pads are needed to allow the needed clearance (the stepper will stick a little under the table).
The rotating plate will be fixed to the stepper thanks to a Pololu Universal Aluminum Mounting Hub for 5mm Shaft.
Sources of information:
Small stepper control: http://arduino-info.wikispaces.com/SmallSteppers
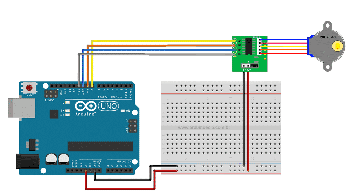
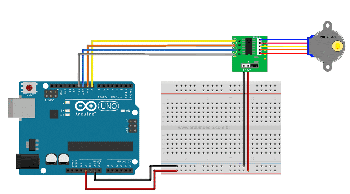
Actually I used 4 different pins, yet the circuit illustration below reproduces accurately the connections. Looking at the photo above (Red wire from Arduino replaces "Pink"):
#define motorPin1 4 // Blue - 28BYJ-48 pin 1
#define motorPin2 5 // Pink - 28BYJ-48 pin 2
#define motorPin3 6 // Yellow - 28BYJ-48 pin 3
#define motorPin4 7 // Orange - 28BYJ-48 pin 4
// Red - 28BYJ-48 pin 5 (VCC)
// Blue - 28BYJ-48 pin GND
#define STEPS_PER_TURN 2048 // number of steps in 360deg;


{kind=link}
Comments
Please log in or sign up to comment.