This is just a simple robot arm made out of readily available materials and instruments, such as micro servos, cardboard, and hot glue, designed for beginners. The code and circuit can be improved, so feel free to make changes and learn!
Features
It can record and play five positions using potentiometers and buttons. (But you can add as many as you want).
Similar instructions can also be found at 0:18 in the Version 2 video below in the Update section
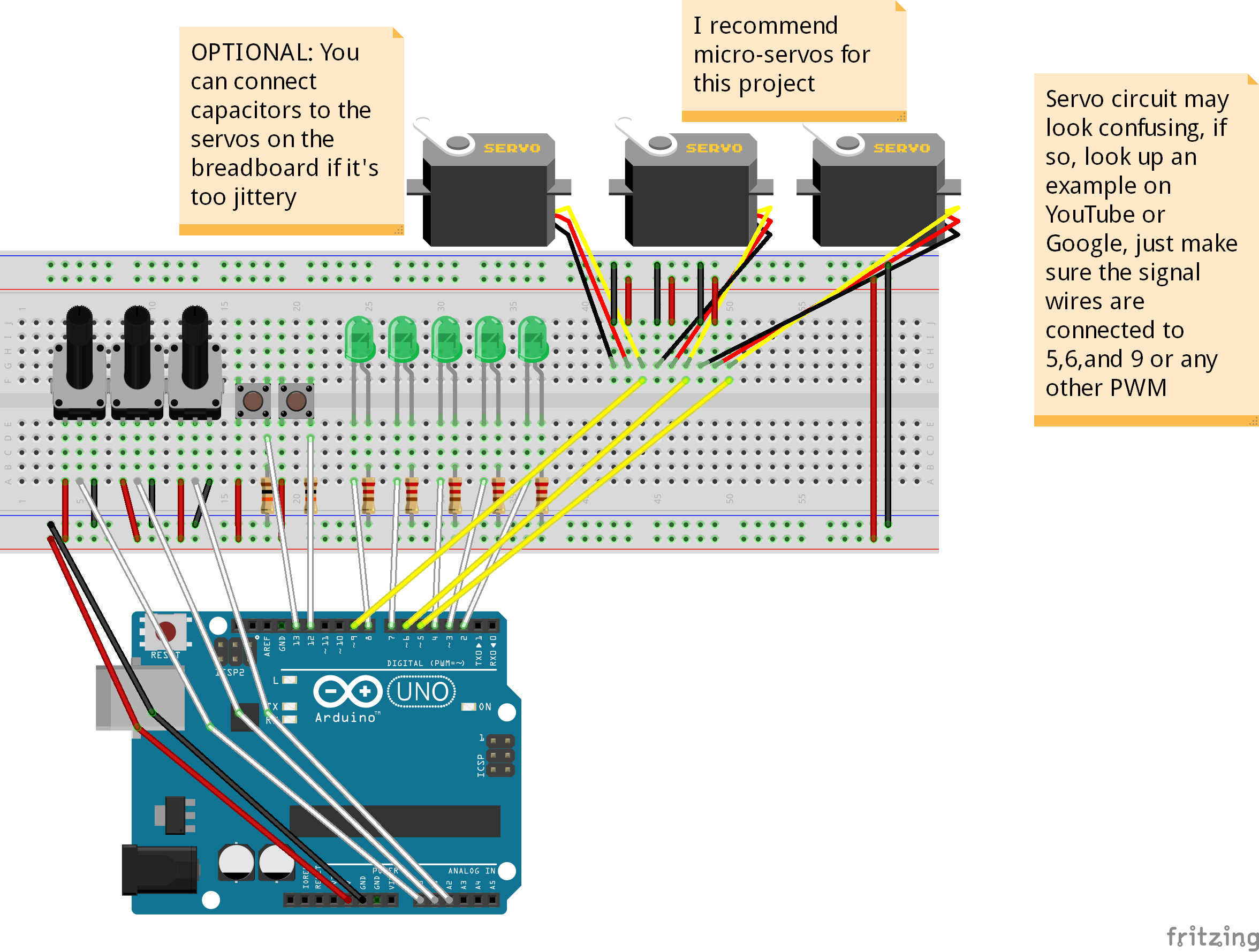
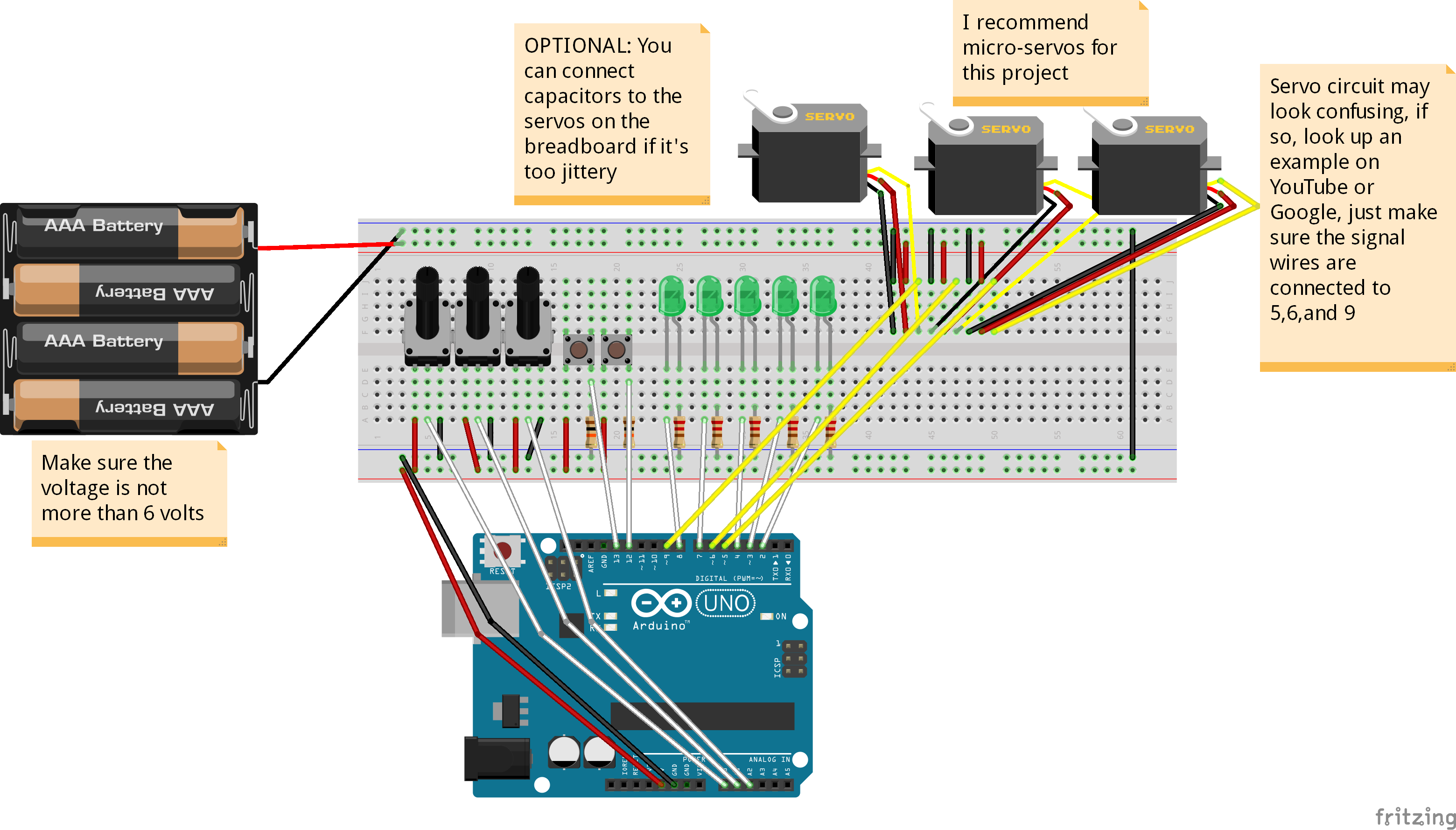
Everything should be able to run off of a power supply from a computer via the USB, but adding an external power supply is also possible, just make sure the servo can take it.
Update:
I've made a second version that is larger and more capable than this. You can check it out here:
There are comments explaining everything in the code, but it is pretty inefficient, I challenge you to make it more efficient!
//Code written by Ryan Chan; it is pretty inefficient, but gets the job done, I challenge you to make it more efficient!//*IMPORTANT CHANGES IN VERSION 2: LEDs 4 and 5 have been moved to pins 7 and 8 respectively; Buttons 1 and 2 have been moved to pins 12 and 13 respectively. This is to make wiring easier.#include<Servo.h>Servoservo1;//ServosServoservo2;Servoservo3;constintLED1=2;//LEDsconstintLED2=3;constintLED3=4;constintLED4=7;constintLED5=8;constintbutton1=12;//Buttonsconstintbutton2=13;intbutton1Presses=0;//Button valuesbooleanbutton2Pressed=false;constintpot1=A0;//Potentimetersconstintpot2=A1;constintpot3=A2;intpot1Val;//Potentimeter valuesintpot2Val;intpot3Val;intpot1Angle;intpot2Angle;intpot3Angle;intservo1PosSaves[]={1,1,1,1,1};//position savesintservo2PosSaves[]={1,1,1,1,1};intservo3PosSaves[]={1,1,1,1,1};voidsetup(){servo1.attach(5);// Set up everything and will run once; attach servos and define the pin modesservo2.attach(6);servo3.attach(9);pinMode(LED1,OUTPUT);pinMode(LED2,OUTPUT);pinMode(LED3,OUTPUT);pinMode(LED4,OUTPUT);pinMode(LED5,OUTPUT);pinMode(button1,INPUT);pinMode(button2,INPUT);Serial.begin(9600);}voidloop(){// put your main code here, to run repeatedly: pot1Val=analogRead(pot1);// This will read the values from the potentimeters and store it...pot1Angle=map(pot1Val,0,1023,0,179);// ... and this will map the values from the potentiometers to values the servos can use and store it for later usepot2Val=analogRead(pot2);pot2Angle=map(pot2Val,0,1023,0,179);pot3Val=analogRead(pot3);pot3Angle=map(pot3Val,0,1023,0,179);servo1.write(pot1Angle);// These will make the servos move to the mapped anglesservo2.write(pot2Angle);servo3.write(pot3Angle);if(digitalRead(button1)==HIGH){// This will check how many times button1 is pressed and save the positions to an array depending on how many times it is pressed; switch/case works like a if statementbutton1Presses++;switch(button1Presses){case1:servo1PosSaves[0]=pot1Angle;servo2PosSaves[0]=pot2Angle;servo3PosSaves[0]=pot3Angle;digitalWrite(LED1,HIGH);Serial.println("Pos 1 Saved");break;case2:servo1PosSaves[1]=pot1Angle;servo2PosSaves[1]=pot2Angle;servo3PosSaves[1]=pot3Angle;digitalWrite(LED2,HIGH);Serial.println("Pos 2 Saved");break;case3:servo1PosSaves[2]=pot1Angle;servo2PosSaves[2]=pot2Angle;servo3PosSaves[2]=pot3Angle;digitalWrite(LED3,HIGH);Serial.println("Pos 3 Saved");break;case4:servo1PosSaves[3]=pot1Angle;servo2PosSaves[3]=pot2Angle;servo3PosSaves[3]=pot3Angle;digitalWrite(LED4,HIGH);Serial.println("Pos 4 Saved");break;case5:servo1PosSaves[4]=pot1Angle;servo2PosSaves[4]=pot2Angle;servo3PosSaves[4]=pot3Angle;digitalWrite(LED5,HIGH);Serial.println("Pos 5 Saved");break;}}if(digitalRead(button2)==HIGH){// Pretty self-explnatory herebutton2Pressed=true;}if(button2Pressed){// if the boolean button2Press is true, then the servos will run though all their saved positionsfor(inti=0;i<5;i++){servo1.write(servo1PosSaves[i]);servo2.write(servo2PosSaves[i]);servo3.write(servo3PosSaves[i]);Serial.println(" potentimeter Angles: ");Serial.println(servo1PosSaves[i]);Serial.println(servo2PosSaves[i]);Serial.println(servo3PosSaves[i]);delay(1050);}}delay(300);}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)














_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.