



Elecrow reached the crowdfunding goal for his new CrowVision 11.6" touchscreen display module (funding will end on December 14th) and sent me one some weeks ago for testing purposes. I've tested it on some SBCs (Single Board Computers) I already had and also with some domestic applications, so here are reported my personal and honest impressions about this display along some experiments I've done, so this is not only a "simple" product review but also a tutorial about display usages in various scenarios and for sure you can grab some cool ideas from this article.
OverviewWe're talking about an HDMI touchscreen display module, made for diy enthusiasts, having generous dimensions (say like a big tablet). It's the kind of monitor a maker would buy for making a custom laptop or, better, one of that fancy cyberdecks or, again, to be used embedded in a wall for controlling house, checking weather, reading news, controlling cameras or the doorbell and so on...
The CrowVision is a bare display don't having an housing so don't expect a classical monitor: we're makers and we want to customize every single aspect of our creations! So this kind of display is very useful for d-i-y tasks: the word "module" in the product description says all. On the back of the display there are 3 moveable hex stand-offs that was thought for attaching the board/SBC you want to connect to display: this thing is simple yet genially.
First than describing applications I personally tried, we must give an eye to specs and stuff included in the product box for making some considerations.
Specs- Screen diagonal: 11.6 inches
- External dimensions*: 291 x 184 mm
- Viewing area dimensions*: 256 x 144 mm
- Display Resolution: 1366 x 768
- Weight: 590g
- LCD Screen type: IPS
- Touch Screen type: Capacitive, 5-points
- Power: 12V (power adapter included)
- Open Source project (OSHWA & CERN-OHL-S-2.0)
- Available ports:- HDMI mini (C) - video input- USB micro-b - touchscreen output- USB type A female - 5V output (up to 3A)- 3.5mm TRS female jack - analog audio output (extracted from HDMI)- amplified audio output
* Those measures was taken by me so there can be small differencies
- 12V 2A wall adapter (cable length ~118 cm)
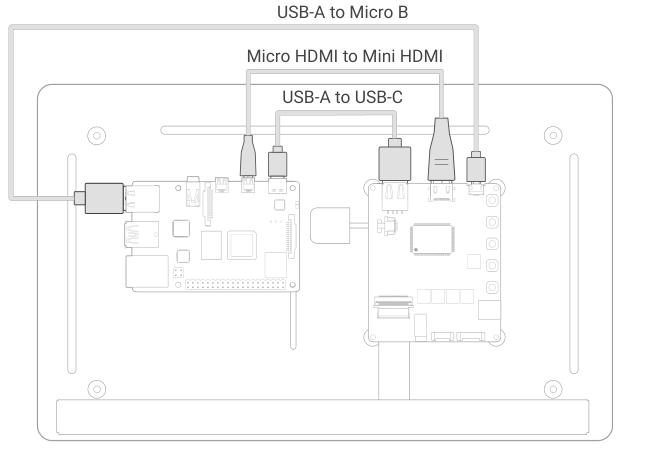
- HDMI mini (C) to HDMI standard (A) cable (~43 cm)
- HDMI mini (C) to HDMI micro (D) cable (~42 cm)
- USB micro-B to USB A cable (~42 cm)
- USB type C to USB A cable (~46 cm)
- Button extension board
- Flat cable for button board (~20 cm)
- 2 velcro ties
- Phillips Screwdriver
The final version will include also two acrylic stands that was not present in my preview sample so I can't talk about those. Elecrow made available the original acrylic stand design in the product github repo (anyway I included the step file here) but, as I said above, I like to customize my own stuff, so, in a couple of hours I designed and 3D-printed my own brackets and then I made available them for hackster.io readers, so you can download my STLs from here (you can see my brackets in various pictures here in the article).
In the download section I uploaded also the design Elecrow made for a full-covering shell, anyway this design requires a big and very precise 3D-printer since has lot of details.
Additionally, the internal border of display has a 3M self-adhesive tape you can use to attach the display to an housing.
ConsiderationsTalking about resolution, a 1366x768px (often referred as FWXGA - Full Wide XGA or, simply, WXGA) is near to a 16:9 aspect ratio (very slightly wider, to be 16:9 width could be 1365+⅓) and became pretty common on 15.6" laptops and tablets so looks to be a very good resolution for an 11.6" display.
LCD screen type is IPS (In Plane Switching): this means you can view the monitor even don't standing perfectly in front of it: viewing angle is pretty good (stated as 178 degrees !) without differencies in colors and brightness. Display brightness is good, maybe a little low for my own taste by default but it can be increased from the menu.
Touch screen is very responsive and works flawlessly. It's a 5-point multitouch: this means that touchscreen module can recognize up to 5 different point of pression, giving touch screen more accuracy than a single-touch one and allowing additional features (supported by applications). Additionally here we have a capacitive touchscreen, not a cheap resistive one.
In the accessories is included a button board with a 20cm flat cable: this is very useful for having display settings buttons wherever you want once you've created your application. External buttons are a simple extension of buttons already present on the controller board. There is only one thing I found strange: the button labeled as "ENTER" could be more properly labelled as "EXIT" imho since the "confirm" function is made from the same "MENU" button you use for entering a menu or a sub-menu and for confirm the setting you've changed using UP and DOWN buttons. If you press the ENTER button instead you'll exit from the setting/menu without confirm. I think this is probably a silkscreen error or a non-definitive firmware revision of my sample.
I like a lot there is an USB type A 5V output you can use for powering your devices directly, using only the power adapter of the display: this will make the whole assembly more compact and tidy. I've powered the Nvidia Jetson Nano and the Raspberry Pi 4 without problems using the display original, included, power supply.
Included power supply is 2A/12V (24W), so max 3A on 5V output is 15W => this mean display electronics would draw about (24-15)=9W (750mA at 12V). Didn't measured those values but I think are good.
There is an HDMI mini (C) video input port, maybe lot of people could prefer a standard HDMI but I can say is not a problem since in the accessories are included 2 cables useful for the big part of applications: an HDMI standard to HDMI mini and an HDMI micro (D) to HDMI mini (this last is good for Raspberry 4, 5 and zero).
We've 2 audio outputs on board (audio is extracted from the HDMI): the classical TRS 3.5mm socket you can use for attaching earphones or an external amplifier, and an amplified audio output on the small 4-pin connector near the TRS socket:
Amplified audio output is driven by a NS4263 class AB / class D 3W amplifier IC. This is an IC I never encountered and I never known about an integrated amplifier that can work in 2 different classes (AB and D) by simply switching from one to another. Switch between classes id controlled by the 3.5mm jack: when you plug-in the jack, class AB is activated so you've also the common ground for the 2 channels and then no audio will be present on the audio output connector. When 3.5mm is not connected, IC works in class D so you've the 2 differential stereo channel on the 4-pin connector. This audio output connector looks to be an 1.25mm pitch Molex Picoblade connector. This thing is awesome since you can connect two speakers without having an external amplifier! Volume can be controlled using the up/down buttons without entering in the menu.
Screws used for board attaching and for bracket are less-common (at least for me) M2.5 type, I'd preferred M3 but is not a real problem: for board attaching you've already 3 screws included on the standoffs so you don't need screws, you'll need only additional 4 M2.5 screws if you want to use brackets I've created but the included stand will not need screws.
If you use my brackets, don't use long screws since you can damage the panel. I used 5mm hex-head screwsSBC Testing
I tested the CrowVision display with some SBCs I have in my drawers:
I had no problems with Nvidia Jetson Nano and with the UpBridge UpCore. I had no problems too on Raspberry Pi with lot of OSes and applications I installed through the Raspberry Pi Imager (Retropie included): the only reccomandation is to edit the config.txt file for setting the right display resolution (I included my config file in the download section).
You can edit theconfig.txtfile removing the micro-SD card from the Raspberry Pi and then opening it from another computer: this is the way I usually do. I also keep the originalconfig.txtrenaming it likeconfig-original.txt
Only for the Raspberry Pi 4 I encountered an exception regarding the latest version of Raspberry Pi OS (dated October 2023 - codename bookworm): I needed to install the previous, Legacy 64-bit version (May 2023 - codename bullseye). Using the latest, bookworm revision, screen appears always "skewed" with every setting combination. I talked to Elecrow about this strange issue and, in the meantime, they collaborated with Raspberry Pi Team and then released a new firmware version for the display, so when you'll receive the display it will probably have the new firmware version having no issue with newer Raspberry Pi Os versions.
Just for information sake: I updated/upgraded the Legacy version without problems.
For Raspberry PI2 and 3, there are no problems since the last Raspberry OS version (32 bit) is only the bullseye revision, anyway you must edit the config.txtfor setting the display resolution (it's the same file I've included here for the RPI4).
I tried also the Raspberry Pi 1 (the very first Raspberry version!) and works without problems! Anyway this particular board cannot be attached on the back of display since has only 2 mounting holes in a weird position, so it's needed some tinkering in this case.
I've the Pine-64 too, but this board is very very large so cannot be attached on the back of the display and then I didn't tried it, if you want I try this board also, leave a comment
One of the best application, for me, remains the emulation of old-school game machines using Retropie.
After SBCs, that are the main purpose this display was created for, I wanted to test some domestic appliances you may find interesting...
Amazon FirestickI'm honest: after doing this, I've risked to have no chances to have my CrowVision display back since my wife fallen in love with this application and wanted to have this permanently in the kitchen!
PFor this application I used a standard female to female HDMI adapter I already had (the cheapest one: this - sponsored link) so I was able to attach the Firestick, through this adapter, to the standard HDMI cable came with the display. Another solution for attaching the Firestick is to buy a Mini (C) HDMI male to Standard (A) HDMI female cable (like this - sponsored link).
I attached the Firestick on the back of display using a simple meccano-like bar and 2 M2.5 screws.
Firestick is then powered using the micro-usb cable included with the display (the one tought to be used for touchscreen). Finally I attached an aux speaker to the 3.5mm analog audio output of the display controller (Sorry, I don't have the connectors for the 4-pin audio output) and result was awesome: a small, portable Streaming TV + Alexa.
Then I enjoyed Loki (yes I'm a Marvel fan and the fact there is Ke Huy Quan in this show, resembling the adult guy "Data" from the Goonies drives me literally mad).
Nothing to say about this: just use the included Standard HDMI cable and go.
You can set the second display as extended or duplicated/clone monitor. I always use the "extended" feature since is very useful for coding and video-editing. The duplicated is useful when you want show your monitor to other people like for presentations.
I know the following is a very basilar info but I noticed lot of people don't know about this: If you use a secondary monitor as extended display, remember to move one display in the monitor settings by drag and dropping it so you can have the mouse pointer coming out from a monitor and then appearing in the other from the right direction! So, if you put the secondary monitor on your left respect the main pc monitor, move the display 1 on the right (or the 2 on the left, same effect)
This application scenario is very good for studio photographs or for static video making (I say static since this display is pretty big and not very suitable for a portable use along the camera). You can attach the CrowVision on your camera HDMI output for seeing the display bigger (photograps use this feature for showing clients the pictures they taken).
I tried on my 2 digital cameras, a mirrorless one, the Fujifilm XT-5, using the included micro-HDMI cable:
and an older DSLR, the Nikon D5200:
For the Nikon D5200, since this camera has a Mini (C) HDMI socket, I bought an HDMI (C) to female HDMI (A) (this cheap one - sponsored link) so I attached the included cable on this
Android Phone external monitorI'm sorry for Apple users (and some Android ones too!) since this is not a thing you can do with every mobile phone. I've an old Samsung S21 and, even if I can see the main display also on the HDMI over USB-C, I enjoyed the Samsung DEX feature that allows to have a secondary, independent monitor over HDMI creating a laptop-like (please, pass me the term) usage experience.
Of course, in this case, you'll need and USB-C adapter, possibly having also a power-delivery port (since this appliance will discharge battery very fast and for a long-term usage is better to connect the charger that will prevent battery discharge) and USB ports for attaching a keyboard and mouse and then have a full laptop experience.
I used this 11-in-1 adapter (sponsored link - but also smaller, simpler, HDMI to USB-C works), then I attached the Standard HDMI cable and powered the phone, through the PD USB-C port of the adapter, using the USB-C cable included in the display, from the display 5V output.
In this case charging protocol will be the standard one, not the fast one, since the display board, of course, has no power delivery feature.
Then I attached a wireless keyboard+mouse adapter and activated the Samsung DEX feature on the phone from the top menù: you'll have the normal view on the phone display and the extended laptop-like view on the CrowVision.
I attached also the CrowVision touchscreen output to another USB port of my adapter... and it worked! This is an awesome thing.
In this usage scenario the audio output from display cannot work because probably phone don't delivers audio through HDMI over USB-C or maybe is an adapter problem, anyway is not important since audio from phone is used (you can attach bluetooth speakers).
Then I tried to play Among-Us from the extended display, using the touch-screen and was perfect!
I made an instagram reel and also a Tik Tok about this
Another cool thing of an adapter like the one I used is that also the ethernet port works with Android so you can use a faster, wired connection and this is good expecially with online gaming and high-resolution video streaming services!
Final considerationsFor me liking a lot the diy projects, those kind of display are always the better choice since I can elaborate my own ideas involving also the 3D-printing.
If you see on my IG, I done some projects in the past using that kind of "diy-displays".
I always used smaller, 7" displays, and this was, for me, the first time using a bigger display so I can say this is more suitable for creating cyberdeck projects / portable computers/devices. The button-extension board is a great thing I personally never saw in a lot of commercial displays and now I can say is necessary in a lot of applications since is useful for controlling audio output (you can think to make also a personalized button board since circuit is very simple).
Display come very protected in his box, I also found 2 protective films on top of the display so I can say: don't worry about delivering.
Final price is very affordable considering the display has a good quality and comes with useful accessories too and some same-width displays costs more and don't have those features. This display is open source hardware too! Elecrow released all schematics.
The fact you can attach an SBC on the back and use power output from display are a really great things.
I received a non-definitive version and Elecrow team was very responsive and collaborative, expecially on the (only one!) issue I found (the rpi4 with bookworm OSrevision) so I can say you can trust on Elecrow support for every problem you can encounter.








{kind=link}
Comments
Please log in or sign up to comment.