


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
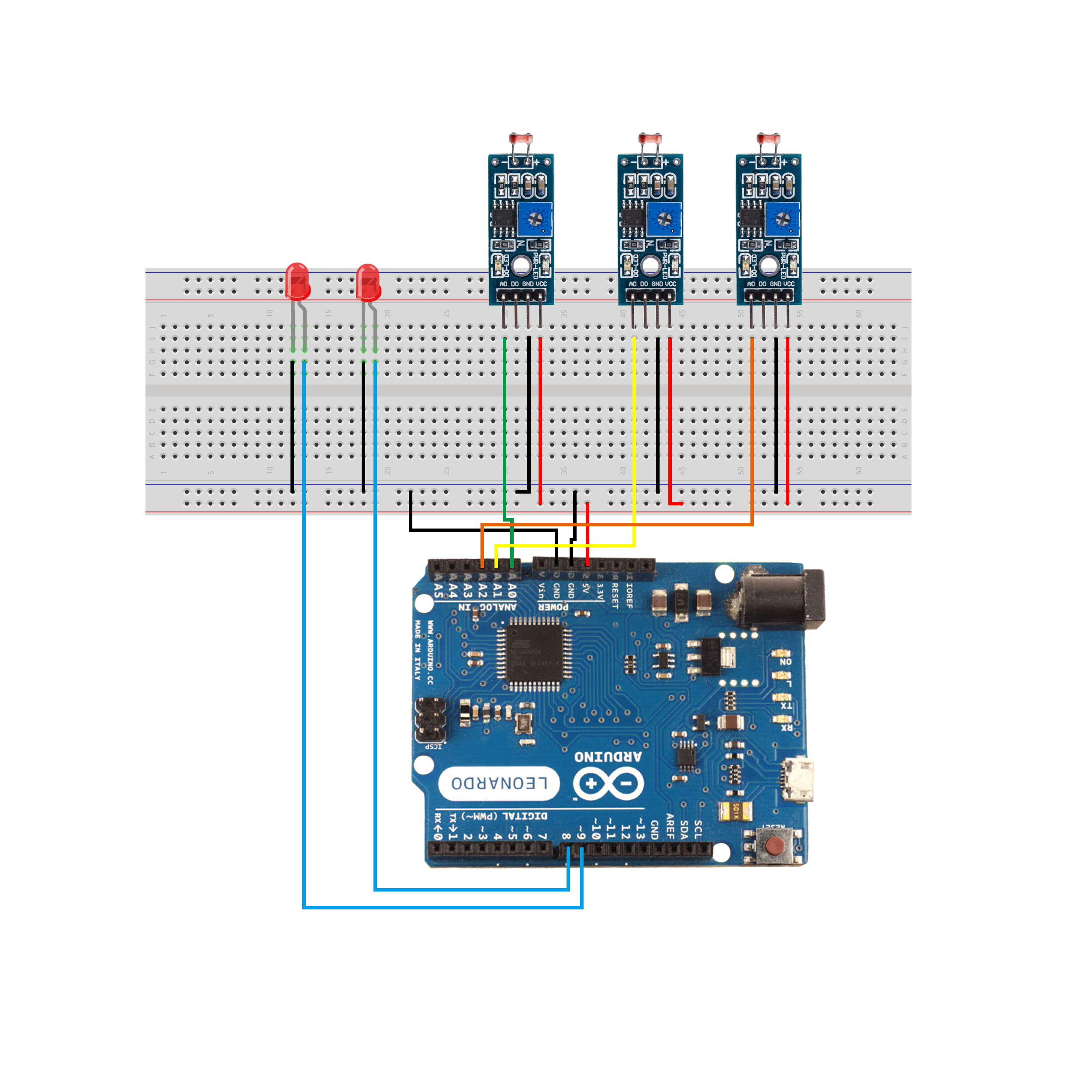
Hello friends in this project of today We will make an Automated Chrome Dino Game using Arduino, this Automated Dino Game is very easy to make in few steps.
Code: https://github.com/DKARDU/dinogame
Components includes:
1 x Arduino LEONARDO
3 x Light Detection https://amzn.to/3iGb2qO
1 x Breadboard https://amzn.to/33yEavN
2 x LEDs diodes https://amzn.to/3g1v5za
1 / 3
More details you can watch the video:
#define USE_KEYBOARD 1
#define DEBUG 1
#define DEBUG_ANALOG 0
#define MEDIAN_WINDOW 5
#define R_Led 9
#define G_Led 8
int steady1, steady2;
uint32_t changeTimer, changeTime;
bool gap1 = 0, gap2 = 0;
bool prevGap1 = 0, prevGap2 = 0;
bool jumpState = 0;
int waitTime = 0;
int flyTime = 0;
uint32_t speedTime, dashTime;
int steadyF1, steadyF2;
int buf1[3], buf2[3], buf3[3], bufWait[3];
#include <Servo.h>
Servo servo;
#include <GyverTimer.h>
GTimer jumpTimer(MS);
GTimer timeoutTimer(MS, 7000);
#include "median.h"
median3 filCur1(buf1);
median3 filCur2(buf2);
median3 filCur3(buf3);
median3 filWait(bufWait);
uint32_t debounce1, debounce2;
#if (USE_KEYBOARD == 1)
#include <Keyboard.h>
#endif
void setup() {
pinMode(R_Led,OUTPUT);
pinMode(G_Led,OUTPUT);
#if (USE_KEYBOARD == 1)
delay(5000);
Keyboard.begin();
#endif
#if (DEBUG == 1)
Serial.begin(9600);
Serial.println("kek");
#endif
servo.attach(12);
servo.write(60);
}
void loop() {
static int count = 0;
static int countWait1 = 0, countWait2 = 0;
count++;
int curVal1 = filCur1.filter(analogRead(A1));
int curVal2 = filCur2.filter(analogRead(A0));
int curVal3 = filCur3.filter(analogRead(A2));
static int lastCur3;
if (count % 5 == 0) {
int delta1 = steadyF1 - curVal1;
int delta2 = steadyF2 - curVal2;
int delta3 = curVal3 - lastCur3;
if (abs(delta1) < 8) {
steadyF1 = curVal1;
countWait1 = 0;
} else {
countWait1++;
if (countWait1 > 15) steadyF1 = curVal1;
steadyF1 += delta3;
}
if (abs(delta2) < 8) {
steadyF2 = curVal2;
countWait2 = 0;
} else {
countWait2++;
if (countWait2 > 15) steadyF2 = curVal2;
steadyF2 += delta3;
}
lastCur3 = curVal3;
}
gap1 = (millis() - debounce1 > 150 && abs(curVal1 - steadyF1) > 20);
gap2 = (millis() - debounce2 > 150 && abs(curVal2 - steadyF2) > 20);
if (prevGap1 != gap1) {
if (gap1) { //
speedTime = millis();
dashTime = millis();
timeoutTimer.reset();
} else { //
flyTime = (millis() - dashTime) * 4.5 + 10;
flyTime = constrain(flyTime, 0, 280);
debounce1 = millis();
}
prevGap1 = gap1;
}
if (prevGap2 != gap2) {
if (gap2) {
waitTime = filWait.filter(constrain(millis() - speedTime, 40, 180));
jumpTimer.setTimeout(map(waitTime, 180, 50, 180, 5));
} else {
debounce2 = millis();
}
prevGap2 = gap2;
}
if (jumpTimer.isReady()) {
if (!jumpState) {
jumpState = 1;
//servo.write(120);
#if (USE_KEYBOARD == 1)
Keyboard.release(KEY_DOWN_ARROW);
delay(10);
Keyboard.press(KEY_UP_ARROW);
digitalWrite(R_Led,LOW);
digitalWrite(G_Led,HIGH);
delay(10);
#endif
jumpTimer.setTimeout(flyTime);
} else {
//servo.write(60);
#if (USE_KEYBOARD == 1)
Keyboard.release(KEY_UP_ARROW);
delay(10);
Keyboard.press(KEY_DOWN_ARROW);
#endif
jumpTimer.stop();
digitalWrite(G_Led,LOW);
digitalWrite(R_Led,HIGH);
delay(20);
jumpState = 0;
}
}
#if (USE_KEYBOARD == 1)
if (timeoutTimer.isReady()) {
Keyboard.press(KEY_UP_ARROW);
delay(10);
Keyboard.release(KEY_UP_ARROW);
digitalWrite(R_Led,LOW);
digitalWrite(G_Led,HIGH);
waitTime = 180;
}
#endif
#if (DEBUG == 1)
#if (DEBUG_ANALOG == 0)
Serial.print(curVal1);
Serial.print(',');
Serial.print(steadyF2);
Serial.print(',');
Serial.println(gap1 * 100);
/*Serial.print(',');
Serial.print(200 + gap1 * 100);
Serial.print(',');
Serial.println(200 + gap2 * 100);*/
#else
Serial.print(curVal1);
Serial.print(',');
Serial.print(curVal2);
Serial.print(',');
Serial.println(curVal3);
#endif
#endif
delay(5);
}



{kind=link}
Comments