

Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
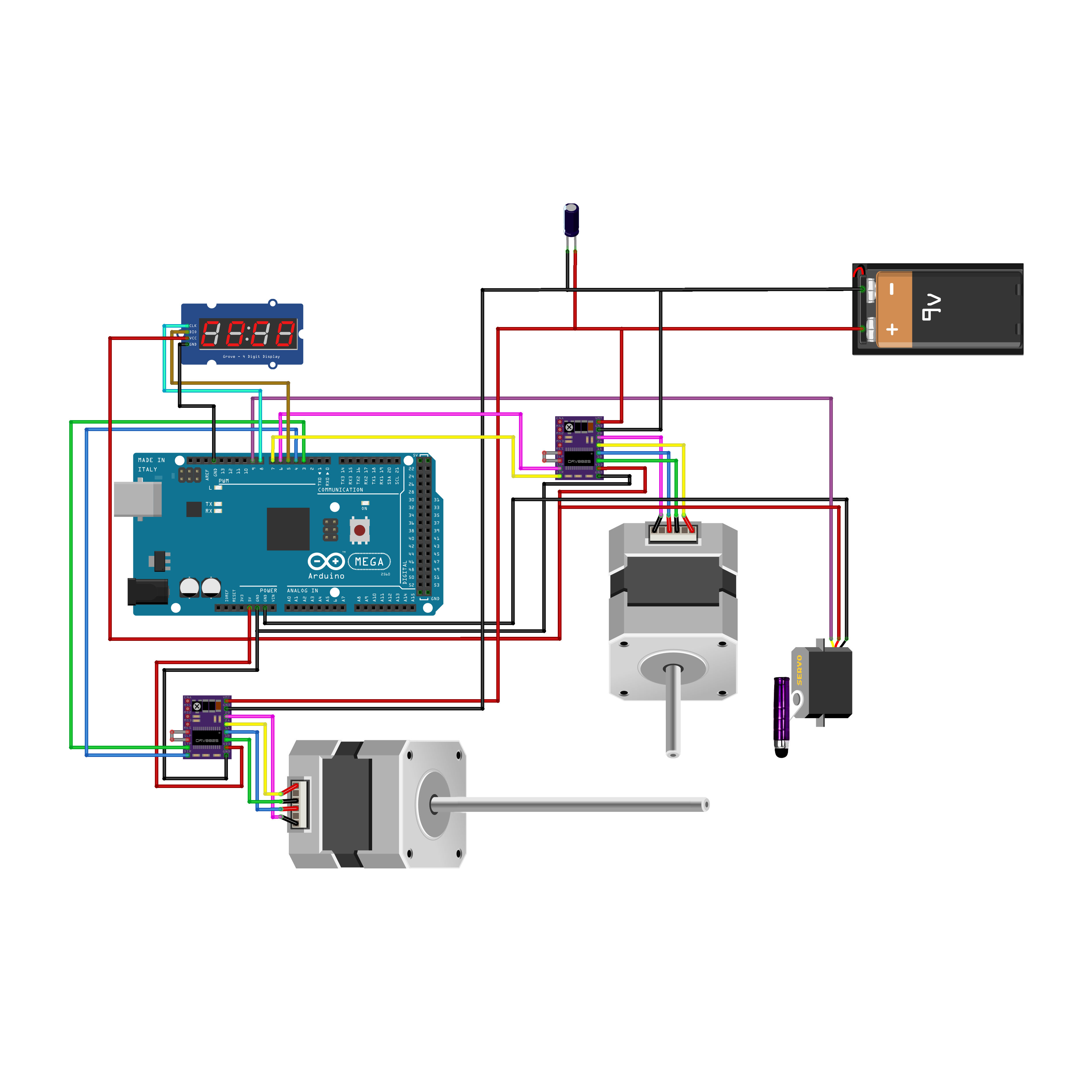
Today, we will make a device which will auto Tiktok scroll Physically, it is not a app. The X-axis is set to slide up and down, and the Y-axis is set to slide left and right, and one more servo is set to follow everyone. Have fun with it.
► Code in GitHub (scheme and sketch): https://github.com/DKARDU/titokscroll
► Components
The following parts were used in this project:
Arduino MEGA 2560
2 x 42 stepper motors, https://amzn.to/3nBxvs2
2 x drv8825 stepper motor driver modules, https://amzn.to/3nBxvs2
TM1637 4-digit digital tube, https://amzn.to/30Qg2DK
MG90S servo, https://amzn.to/34L2LNg
9V battery
100uf capacitance, https://amzn.to/37Dau2g
Mini capacitive resistive touch screen pen
Capacitor silicone conductive brush head
❤Subscribe It's Free https://bit.ly/2C6HdAg
Thanks for watching, Stay home and Be safe...Have a great day!
#Arduinoproject #Arduinotiktok #Howto #COVID19 #autotiktok #autoscrolltiktok #autoscroll



{kind=link}
Comments
Please log in or sign up to comment.