



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
This project was made to graduate my University, the project and budget was all mine idea and money, I chose this project because I was optimist to build a fully homemade airplane using only Arduino. The airplane is build as well by me, no help, i made tons of research on internet and decided to make this personal design, using isolation foam and hot wire I managed to cut the pieces and hand sanding them to look nice and smooth.
Decided to use arduino Uno because that's what I had and more than 10x Atmegas328p so I made the circuit design using EAGLE added the components:
- MPU6050 Gyro Axx.
- GPS
- DHT Temp humidity sensor
- Geiger counter for nuclear radiation sensor mSv
- BMP for pressure and altitude
- and many other SD card for black box saving all my data..etc
So made the Circuit design and came up with 3 circuits on of the top of other as shield/sandwich.
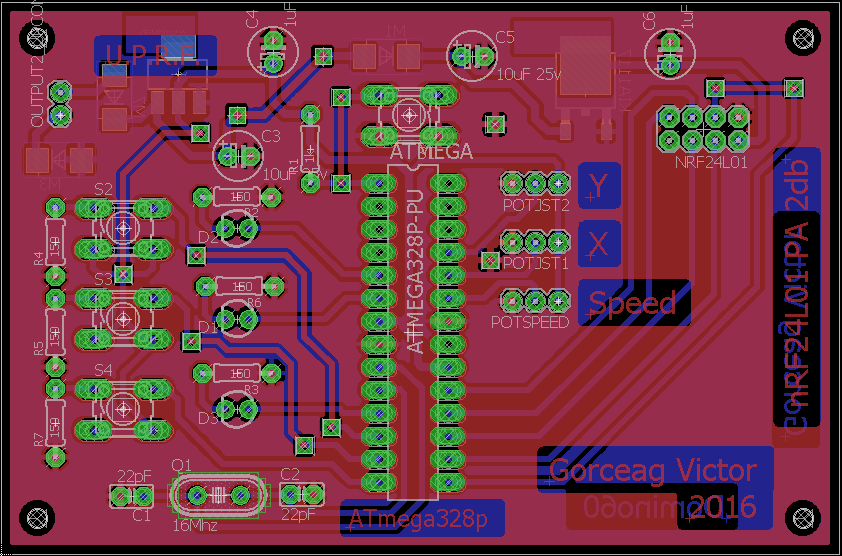
Etching process (photos)/instructions.I made the PCB's in EAGLE (free version) software using as base the ATmega328p microcontroller and adding the parts that I need, buttons, LEDs, regulators, pins for nRF24L01 .etc
Using the transfer paper process I used laser printer and photo glossy paper to print the circuit then cut exactly the side of it and cutting as well a double side copper PCB. After that carefully cleaning and placing the papers and locking them with paper tape, ironing it about 10 minutes both sides, pressing hard and carefully the sides. After 10 minutes placing the PCB in the water so the paper to get wet and being easy to peel.
Peel really carefully/gently the the paper, after cleaning all the paper is time for etching, using warm water making the process faster and a small sponge which is not in the picture carefully cleaning it.
At the end use a high sand paper sponge or a dish cleaner sponge to rub all the black ink / color on the PCB and finally you get a clean homemade ready PCB to use.
<<< Press the arrows to see the process >>>
This is the 1st PCB only there is more.
As well managed to control the ESC and motor with the Arduino and used a cheap joystick and nRF24L01 PA as Radio Control, took the gaming joystick modified it added and extra pot as speed control and programmed the joystick with another circuit I made.
The airplane was made to fly and collect data in regions not accessible for humans or hazard zones or just collect weather data. The airplane is capable to collect, temperature, humidity, radiation (x,gama) in mSv, as well collecting altitude data, GPS coordinates, gyro, Gforce..etc
The airplane as well is capable to fly like autopilot just need to insert the coordinates and it will go then come back, it's self stabilized using MPU6050 and it's hard to crash.
Total build/design time: 35~40 days. Took me like an year to build because I worked with this project only in my free time + I had to wait the components to arrive from China.
P.s. Sadly I don't have more footage or info, I will keep looking in my project folder and update what else I got. Keep up, be optimists and always keep walking and make your dreams come true.
Support me if you can
https://www.patreon.com/SupportMe746
Youtube:
Thanks,
Domino60



{kind=link}
Comments
Please log in or sign up to comment.