// Arduino Type Leanardo
// Arduino Revision 1.8.7
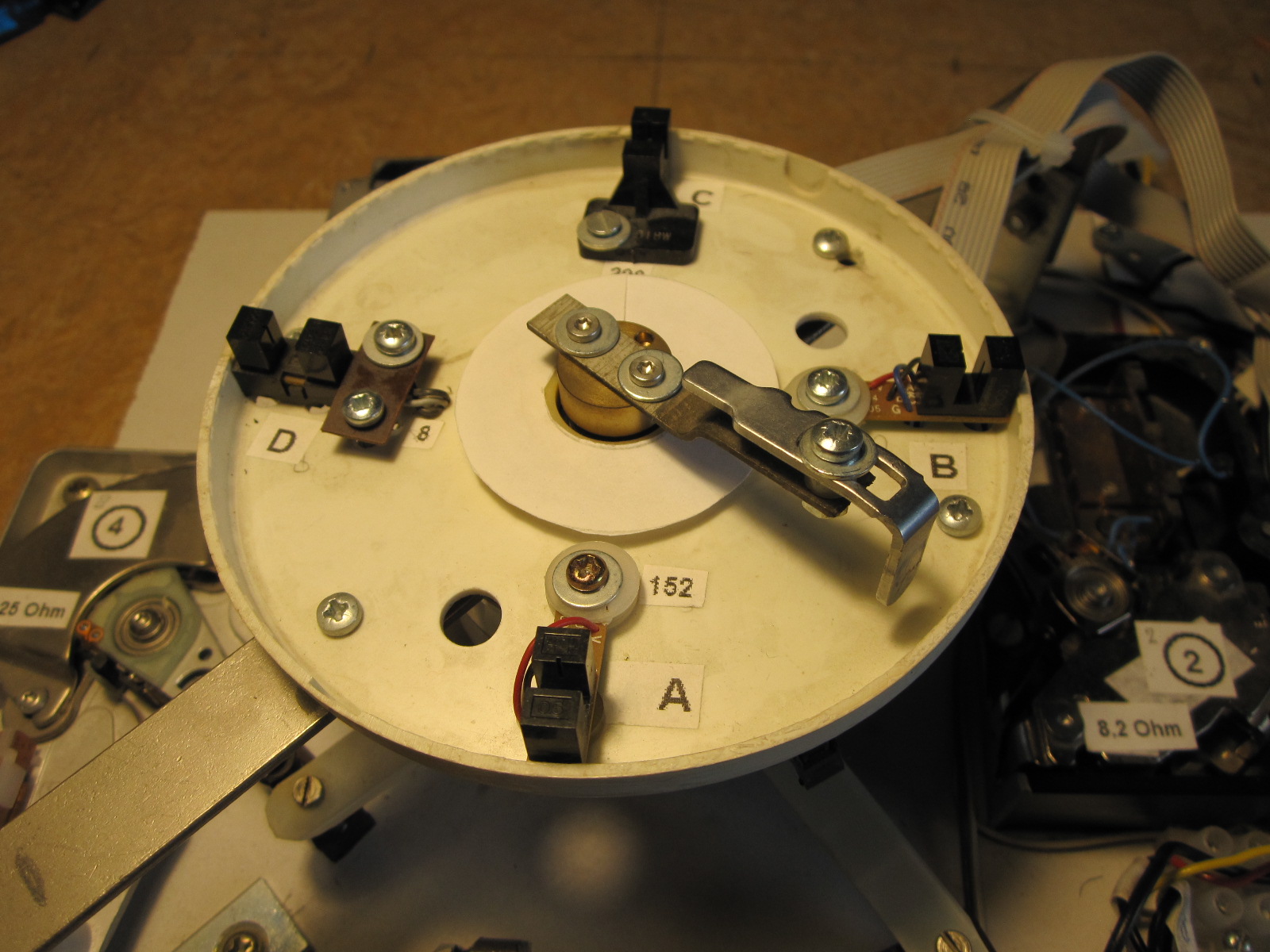
// Action of HD-Motors : Pulling only
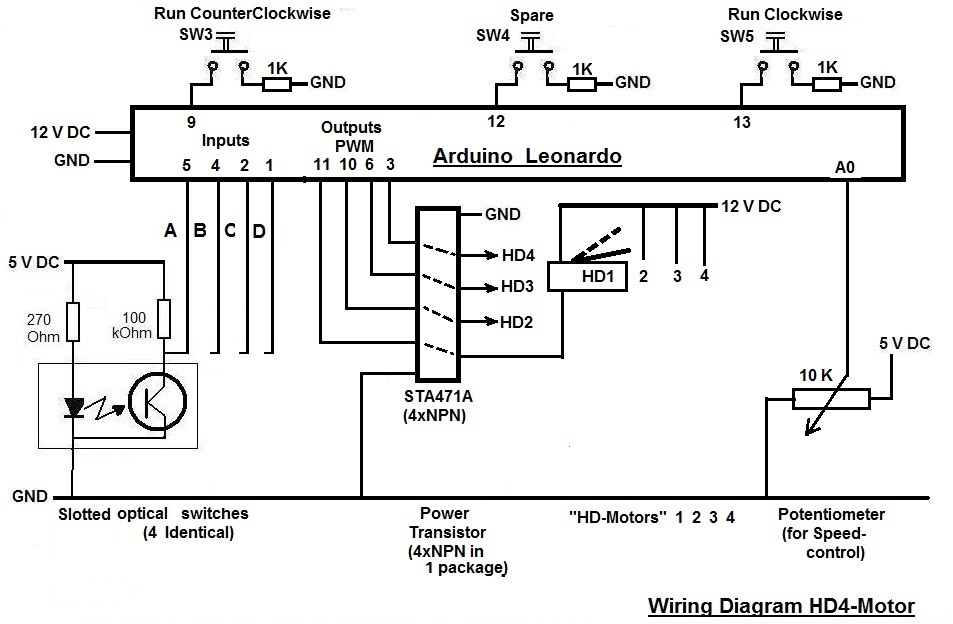
// PinNumbers Leonardo :
int OptSWD=1; // Optical Switch
int OptSWC=2; // Optical Switch
int HD4=3; // HardDiscmotor PWM Output
int OptSWB=4; // Optical Switch
int OptSWA=5; // Optical Switch
int HD3=6; // HardDiscmotor PWM Output
int SW3=9; // PushbuttonSwitch (RunCounterClockWise)
int HD2=10; // HardDiscmotor PWM Output
int HD1=11; // HardDiscmotor PWM Output
int SW4=12; // PushbuttonSwitch (future)
int SW5=13; // PushbuttonSwitch (RunClockWise)
int PotSpeed=A0; // PotentioMeter for SpeedAdjustment
// Variables :
int TimeOn; // Duration of time Outputs ON
int Number;
int StateSW3;
int StateSW4;
int StateSW5;
int StateOptSWA;
int StateOptSWB;
int StateOptSWC;
int StateOptSWD;
int StatePotSpeed;
int Speed;
boolean StartedCW;
boolean StartedCCW;
void setup()
{ Serial.begin(9600);
pinMode (HD1, OUTPUT);
pinMode (HD2, OUTPUT);
pinMode (HD3, OUTPUT);
pinMode (HD4, OUTPUT);
pinMode (SW3, INPUT); digitalWrite(SW3, HIGH); // Internal Pull up
pinMode (SW4, INPUT); digitalWrite(SW4, HIGH); // Internal Pull up
pinMode (SW5, INPUT); digitalWrite(SW5, HIGH); // Internal Pull up
pinMode (PotSpeed, INPUT); // PotSpeed
pinMode (OptSWA, INPUT); digitalWrite(OptSWA, LOW); // Internal Pull down
pinMode (OptSWB, INPUT); digitalWrite(OptSWB, LOW); // Internal Pull down
pinMode (OptSWC, INPUT); digitalWrite(OptSWC, LOW); // Internal Pull down
pinMode (OptSWD, INPUT); digitalWrite(OptSWD, LOW); // Internal Pull down
TimeOn=0; StartedCW=0; StartedCCW=0;}
void loop()
{ StateSW3=digitalRead(SW3); if(StateSW3==0) {RunCounterClockWise();} else {StopMotors(); StartedCCW=0;} //
StateSW5=digitalRead(SW5); if(StateSW5==0) {RunClockWise();} else {StopMotors(); StartedCW=0;} //
// DisplayMonitor(); // For Testing only
}
void RunClockWise() // Oke Met PWM en Regelbare Speed // Test
{ if (StartedCW==0){StartClockWise();}
ReadOpticalSwitch();
TimeOn=40; // was 40 //250 Schokt // 100 Lopen Redelijk // 50-80 Loopt Redelijk // 10 LooptSlecht // Beste is 50
if (StateOptSWA==1) {analogWrite(HD1,0); analogWrite(HD2,0); analogWrite(HD3, Speed); analogWrite(HD4, Speed); delay(TimeOn);} //
if (StateOptSWD==1) {analogWrite(HD1,0); analogWrite(HD2, Speed); analogWrite(HD3, Speed); analogWrite(HD4,0); delay(TimeOn);} //
if (StateOptSWC==1) {analogWrite(HD1, Speed); analogWrite(HD2, Speed); analogWrite(HD3,0); analogWrite(HD4,0); delay(TimeOn);}
if (StateOptSWB==1) {analogWrite(HD1, Speed); analogWrite(HD2,0); analogWrite(HD3,0); analogWrite(HD4, Speed); delay(TimeOn);}
}
void RunCounterClockWise() // Met PWM en Regelbare Speed //
{ if (StartedCCW==0){StartCounterClockWise();}
ReadOpticalSwitch();
TimeOn=40; // was 40
if (StateOptSWA==1) {analogWrite(HD1,0); analogWrite(HD2,Speed); analogWrite(HD3, Speed); analogWrite(HD4, 0); delay(TimeOn);} //
if (StateOptSWB==1) {analogWrite(HD1,0); analogWrite(HD2, 0); analogWrite(HD3, Speed); analogWrite(HD4,Speed); delay(TimeOn);}
if (StateOptSWC==1) {analogWrite(HD1, Speed); analogWrite(HD2, 0); analogWrite(HD3,0); analogWrite(HD4,Speed); delay(TimeOn);}
if (StateOptSWD==1) {analogWrite(HD1, Speed); analogWrite(HD2,Speed); analogWrite(HD3,0); analogWrite(HD4, 0); delay(TimeOn);} //
}
void StartClockWise() //
{ TimeOn=100; // was 100
analogWrite(HD4, 255); delay(1000); analogWrite(HD4, 0); // To StartPosition !!
for (Number=0; Number<4; Number++)
{analogWrite(HD3, 255); delay(TimeOn); analogWrite(HD3, 0); //
analogWrite(HD2, 255); delay(TimeOn); analogWrite(HD2, 0); //
analogWrite(HD1, 255); delay(TimeOn); analogWrite(HD1, 0);
analogWrite(HD4, 255); delay(TimeOn); analogWrite(HD4, 0);}
TimeOn=TimeOn-50; StartedCW=1;}
void StartCounterClockWise() //
{ TimeOn=100; // was 100
analogWrite(HD4, 255); delay(1000); analogWrite(HD4, 0); // To StartPosition !!
for (Number=0; Number<4; Number++)
{analogWrite(HD1, 255); delay(TimeOn); analogWrite(HD1, 0); //
analogWrite(HD2, 255); delay(TimeOn); analogWrite(HD2, 0); //
analogWrite(HD3, 255); delay(TimeOn); analogWrite(HD3, 0);
analogWrite(HD4, 255); delay(TimeOn); analogWrite(HD4, 0);}
TimeOn=TimeOn-50; StartedCCW=1;}
void DisplayMonitor()
{ StateSW3=digitalRead(SW3); Serial.print("SW3 = " ); Serial.print(StateSW3);
StateSW4=digitalRead(SW4); Serial.print(" SW4 = " ); Serial.print(StateSW4);
StateSW5=digitalRead(SW5); Serial.print(" SW5 = " ); Serial.print(StateSW5);
StateOptSWA=digitalRead (OptSWA); Serial.print(" OptSWA = " ); Serial.print(StateOptSWA);
StateOptSWB=digitalRead (OptSWB); Serial.print("\t OptSWB = "); Serial.print(StateOptSWB);
StateOptSWC=digitalRead (OptSWC); Serial.print("\t OptSWC = "); Serial.print(StateOptSWC);
StateOptSWD=digitalRead (OptSWD); Serial.print("\t OptSWD = "); Serial.print(StateOptSWD);
Speed=analogRead(PotSpeed)/4; Serial.print("\t Speed = "); Serial.print(Speed);
Serial.println();}
void ReadOpticalSwitch() //
{ StateOptSWA=digitalRead (OptSWA);
StateOptSWB=digitalRead (OptSWB);
StateOptSWC=digitalRead (OptSWC);
StateOptSWD=digitalRead (OptSWD);
Speed=analogRead(PotSpeed)/4;}
void StopMotors()
{ analogWrite(HD1, 0); analogWrite(HD2, 0);
analogWrite(HD3, 0); analogWrite(HD4, 0);}












_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.