



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
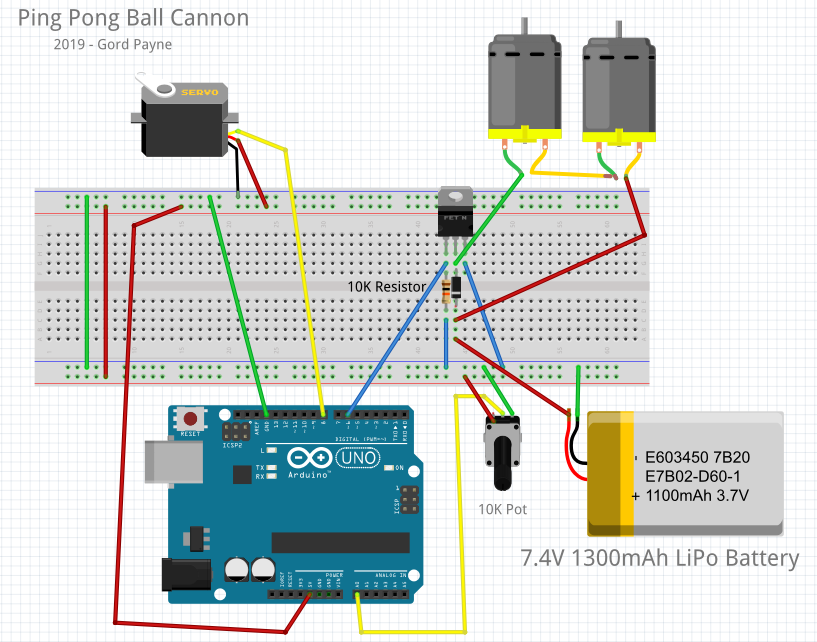
Everyone needs a Ping Pong Ball Cannon!
I had the desire to build a ping pong ball cannon. Cardboard being such a versatile material, I thought I'd use it for the barrel.
I started with two 13, 000 rpm 6V DC motors and some thin robot wheels. The results were encouraging but inconsistent. Sometimes the balls would shoot 20 feet, sometimes 4 feet.
I thought that wider flywheels with proper rubber treads would help. So I used TinkerCAD to design two 3cm diameter wheels that had a 1cm thickness. The centre was made to receive the gears mounted on the motors. For a tread, I used the thick rubber bands that broccoli comes bound in at the grocery store. They were glued to the wheels with Gorilla Super Glue. I found that without the glue the wheels spun so quickly that the rubber bands flew off!
The barrel is a cardboard 'trough' mounted on a piece of 1x3 wood with two holes drilled to mount the motors. The flywheels fit through the sides of the trough.
A potentiometer is used to adjust the speed of the flywheels.
An auto-feeder is made with a cardboard 'pusher' mounted to a small servo via a short length of reinforced wire as a pushrod.
The Arduino sketch spins up the motors for 2 seconds then the servo pushes the ping pong ball (in this case, practice golf ball) into the wheels and it's flung out of the barrel. The potentiometer allows you to vary the speed of the motors.
Note: The reason that the servo is attached and detached as needed is to reduce the 'chatter' that happens inside the servo when it's searching for neutral. That wastes power and it's also annoying to see the servo jittering while it's idle.
So build your own and start flingin'!
Update: February 6, 2019. Just learned that the cannon officially needs to fire foam practice golf balls. The flywheels with the rubber treads don't work. I removed the treads and cut sawtooth patterns into the wheels which improved performance. I then moved the flywheels about 7mm closer to each other providing more compression of the ball as it passed through the flywheels.
The modification worked very well and I've got about 17+ feet range on the cannon for a 7.4V battery. A 12V high amp hour battery provides marginally more range. So it's a great result overall!


{kind=link}
Comments
Please log in or sign up to comment.