



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
INTRODUCTION:
A railroad crossing or level crossing is an intersection of railroad track with a road. A railroad crossing can offer "active" protection in the form of warning signs, bells and gates. A railroad crossing can also be passing with no warning system that indicates an approaching train.
Level crossings pose a risk of collisions between trains on track and the vehicles crossing the track. Worldwide, several incidents of vehicle-rail collisions at the level crossing are reported every year, leading to injuries and deaths. As per a published statistics, there were 2280 incidents of railroad crossing accidents in the United States, leading to 232 deaths and 822 injuries. As another example, 40% of railway accidents are caused at unmanned level crossings in India.
The main cause of these accidents are due to human error at the "passive" level crossings. This project is a prototype "proof-of-concept" system to reduce accidents at the unmanned/passive level crossings and add a number of other safety features.
Please note that this project is evolving and will go through several changes over the next few weeks.
ABOUT:
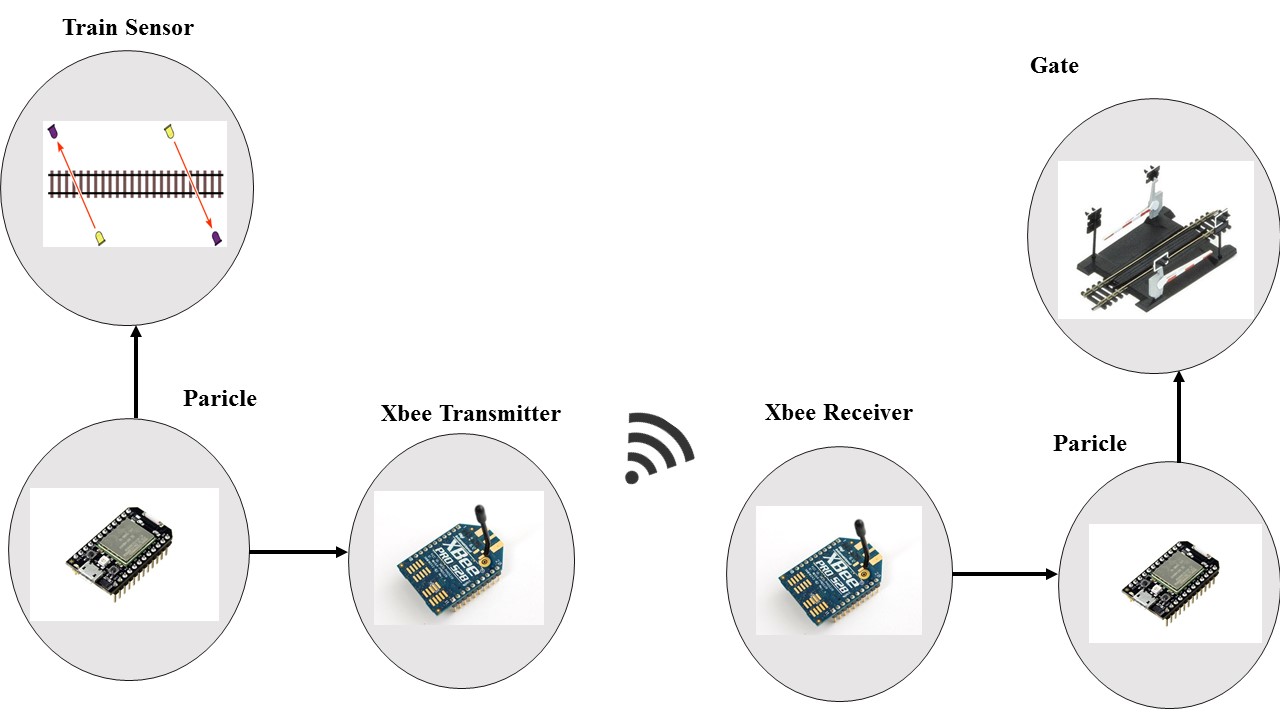
This system is aimed at increasing security at the passive level crossings The system has two parts
- Sensor module on the tracks. These sensors are placed at a configurable distance from the level crossing. sensor side used to detect the train. These are placed on both sides of the crossing. The sensor module detects the presence of the train communicates it to the control hub.
- The control hub which manages the controls at the level crossing. The controls could include gate, bells, lights etc. When the control hub determines presence of train between the sensor module points, it activates controls at the crossing such as closing the gate, ringing the bell, or flashing lights, to prevent a vehicle from going on the track.
SENSOR MODULE:
The sensor module supports three types of sensor ; Infrared , Ultrasonic and pressure sensor. The system can be configured with any sensor module suitable for the particular environment The configurations is also done for the range with which the sensor module detects the presence of the train.
The sensor module is placed closed to the track in such a way that it can detect a passing train. It continuously monitors using the configured sensor, for any object/train in front of it. If train is detected, information is communicated to the control hub using XBees. XBee has been chosen because of the communication range it can provide. The sensor modules can draw power from the power lines close to the track.
CONTROL HUB:
The control hub is placed near the level crossing. It consists of a particle product such as Core or Photon. The hub is interfaced within a ultrasonic sensor, servo motor, XBee module. and interfaces for lights and bells. It is configured to receive data from the both sensor modules placed at a distance on the track from the crossing. Here are the functions:
- It receives data from sensor modules on the presence of train on the track. This communication is over XBee.
- When it detects the presence of train on the track between sensor modules, it activates the alarm bells and lights.
- It checks for presence of any vehicle on the track at the crossing. This is done with the help of Ultrasonic sensor.
- If the vehicle is stuck on the track, it sends alarm to the signal near the train. This signal flashes red to stop the approaching train.
- Once the track is clear, it activates the gate to close it for traffic.
- When the data from the other sensor indicates that the train has crossed, it activates the control to stop the bell and the lights and opens the gate.
Advantages:
- Until the train is on the track near the crossing, the gate remains closed preventing accidents.
- If a vehicle is struck on track due to some problem, train is signaled to stop well before it reaches the gate preventing collision.
- System alerts the vehicles using a buzzer while is gate is being closed to prevent vehicles being struck on the track when gate closes.
Disadvantages:
- Humans or animals on track may be mistaken for a train and gate could be closed interrupting the traffic flow.
/* AUTOMATED RAILROAD LEVEL CROSSING
*
* TRAINSENSOR Ver 1.1 JUNE 2015
*
*/
/**
This components detects the presence of train on track. It can use any of the sensors (Ultrasonic, Infrared
or pressure sensor to detect a train on the track. Once sensed, it communicates the information over XBee to
the Control Hub.
**/
/*
Based on-
"https://github.com/krvarma/Spark_XBee_Remote_Door_Monitor"
Xbee library - "https://github.com/pkourany/XBee_Library"
*/
// This #include statement was automatically added by the Particle IDE.
#include "HC_SR04.h"
// This #include statement was automatically added by the Particle IDE.
#include "XBee.h"
// mx and min values for ultrasonic sensor. Different values to be set for other sensors
int maxVal = 1100;
int minVal = 2200;
// Pins used for connecting ultrasonic sensor
#define TRIGPIN 5
#define ECHOPIN 6
int delyval = 1000; // Default delay value
int pressureSensor();
int IRSensor();
int USSensor();
int ( *sensorFunc)(); // Function Pointer for the sensor function
XBee xbee = XBee(); // Xbee object
uint8_t payload[] = { 0, 0 }; // Payload to be sent with the XBee message
XBeeAddress64 addr64; // 64 bit address of the XBee module
ZBTxRequest zbTx;
ZBTxStatusResponse txStatus;
HC_SR04 rangefinder = HC_SR04(TRIGPIN, ECHOPIN); // Ultrasonic sensor module function
void setup()
{
addr64 = XBeeAddress64(0, 0);
zbTx = ZBTxRequest(addr64, payload, sizeof(payload));
txStatus = ZBTxStatusResponse();
sensorFunc = USSensor; // * Assign Ultrasonic Sensor by default
pinMode(TRIGPIN,OUTPUT);
pinMode(ECHOPIN,INPUT);
Serial.begin(9600);
Spark.function("sensorConfig", SensorConfig);
xbee.setSerial(Serial);
}
void loop()
{
int sensorval = sensorFunc(); // Call the configured sensor
// Check if the sensed parameter is between the configured values
if ((sensorval >= minVal) && (sensorval <= maxVal))
{
// Get the lower and upper bytes and put them up in the payload
payload[0] = sensorval >> 8 && 0xff;
payload[1] = sensorval && 0xff;
// Send the data to control hub who is listening
xbee.send(zbTx);
if (xbee.readPacket(500))
{
// got a response from the control hub!
// should be a znet tx status
if (xbee.getResponse().getApiId() == ZB_TX_STATUS_RESPONSE)
{
xbee.getResponse().getZBTxStatusResponse(txStatus);
// get the delivery status, the fifth byte
if (txStatus.getDeliveryStatus() == SUCCESS)
{
// success. time to celebrate
Serial.println("Xbee Success ");
}
else
{
// the remote XBee did not receive our packet.
// is it powered on?
Serial.println("Xbee error in recieving by the hub");
}
}
}
else if (xbee.getResponse().isError())
{
Serial.println("Error reading packet. Error code: ");
Serial.println(xbee.getResponse().getErrorCode());
}
else
{
// local XBee did not provide a timely TX Status Response -- should not happen
Serial.println("Xbee error ");
}
delay(delyval);
}
}
/* Function to configures the sensors
Usage format : <Cmd> <Argument>
Example
setMinVal <minimum value>
SetMaxVal <minimum value>
setSensor <Pressure|IR|US>
delyval <delay value in milliseconds>
*/
int SensorConfig(String args)
{
int retval = 1;
String cmd, cmdarg1, cmdarg2;
char cargs[30], ccmd[20], carg1[20], carg2[20];
long addlsb, addmsb;
args.toCharArray(cargs, 30);
sscanf(cargs, "%s%s%s", ccmd, carg1, carg2);
cmd = ccmd;
cmdarg1 = carg1;
cmdarg2 = carg2;
// Format of the args : <command> <arg1> <arg2>
// Example
// setMinVal <minimum value>
// SetMaxVal <minimum value>
// setSensor <Pressure|IR|US>
// delyval <delay value in milliseconds>
// Allow rhe minimum value to be set over the internet
if (cmd == "setMinVal")
minVal = cmdarg1.toInt();
// Allow rhe minimum value to be set over the internet
else if (cmd == "setMinVal")
maxVal = cmdarg1.toInt();
// Command is to choose the sensor
else if (cmd == "setSensor")
{
if (cmdarg1 == "Pressure") //select pressure sensor/force sensor
sensorFunc = pressureSensor;
else if(cmd == "IR") //select Ir sensor
sensorFunc = IRSensor;
else if(cmd == "US") //select ultrasonic sensor
sensorFunc = USSensor;
}
else if (cmd == "delyval")
delyval = cmdarg1.toInt();
else if(cmd == "setaddr")
{
addmsb = cmdarg1.toInt();
addlsb = cmdarg2.toInt();
XBeeAddress64 addr64 = XBeeAddress64(addmsb, addlsb); //set the receiving xbee address
}
else
retval = 0;
return retval;
}
// Senes the pressure on the track
int pressureSensor()
{
return analogRead(A5);
}
// Sends an IR pulse and gets the echo.
int IRSensor()
{
return analogRead(A5);
}
// Sends an ultrasonic pulse and gets the distance based the time for the echo
int USSensor()
{
return rangefinder.getDistanceCM();
}
HC_SR04.h
C/C++I have made some changes.
#ifndef _HC_SR04
#define _HC_SR04
#include "application.h"
class HC_SR04
{
public:
HC_SR04(int trigPin, int echoPin);
HC_SR04(int trigPin, int echoPin, double minCM, double maxCM);
int getDistanceCM();
private:
int _echoPin;
int _trigPin;
double _minCM;
double _maxCM;
void sendTriggerPulse(int pin);
void waitForEcho(int pin, int value, long timeout);
};
#endif
#include "HC_SR04.h"
HC_SR04::HC_SR04(int trigPin, int echoPin){
_minCM = 10.0;
_maxCM = 250.0;
_trigPin = trigPin;
_echoPin = echoPin;
pinMode(_trigPin, OUTPUT);
pinMode(_echoPin, INPUT);
}
HC_SR04::HC_SR04(int trigPin, int echoPin, double minCM, double maxCM){
_minCM = minCM;
_maxCM = maxCM;
_trigPin = trigPin;
_echoPin = echoPin;
pinMode(_trigPin, OUTPUT);
pinMode(_echoPin, INPUT);
}
int HC_SR04::getDistanceCM(){
sendTriggerPulse(_trigPin);
waitForEcho(_echoPin, HIGH, 100);
long startTime = micros();
waitForEcho(_echoPin, LOW, 100);
long endTime = micros();
long duration = endTime - startTime;
double distance = duration / 29.0 / 2.0;
if (distance < _minCM || distance > _maxCM){
return -1;
}
return (int) distance;
}
void HC_SR04::sendTriggerPulse(int pin){
digitalWrite(pin, HIGH);
delayMicroseconds(10);
digitalWrite(pin, LOW);
}
void HC_SR04::waitForEcho(int pin, int value, long timeout){
long giveupTime = millis() + timeout;
while (digitalRead(pin) != value && millis() < giveupTime) {}
}
#include "HC_SR04.h"
HC_SR04::HC_SR04(int trigPin, int echoPin){
_minCM = 10.0;
_maxCM = 250.0;
_trigPin = trigPin;
_echoPin = echoPin;
pinMode(_trigPin, OUTPUT);
pinMode(_echoPin, INPUT);
}
HC_SR04::HC_SR04(int trigPin, int echoPin, double minCM, double maxCM){
_minCM = minCM;
_maxCM = maxCM;
_trigPin = trigPin;
_echoPin = echoPin;
pinMode(_trigPin, OUTPUT);
pinMode(_echoPin, INPUT);
}
int HC_SR04::getDistanceCM(){
sendTriggerPulse(_trigPin);
waitForEcho(_echoPin, HIGH, 100);
long startTime = micros();
waitForEcho(_echoPin, LOW, 100);
long endTime = micros();
long duration = endTime - startTime;
double distance = duration / 29.0 / 2.0;
if (distance < _minCM || distance > _maxCM){
return -1;
}
return (int) distance;
}
void HC_SR04::sendTriggerPulse(int pin){
digitalWrite(pin, HIGH);
delayMicroseconds(10);
digitalWrite(pin, LOW);
}
void HC_SR04::waitForEcho(int pin, int value, long timeout){
long giveupTime = millis() + timeout;
while (digitalRead(pin) != value && millis() < giveupTime) {}
}
XBee.h
C/C++Based on-
"https://github.com/krvarma/Spark_XBee_Remote_Door_Monitor"
Xbee library - "https://github.com/pkourany/XBee_Library"
/**
* Copyright (c) 2009 Andrew Rapp. All rights reserved.
*
* This file is part of XBee-Arduino.
*
* XBee-Arduino is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* XBee-Arduino is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with XBee-Arduino. If not, see <http://www.gnu.org/licenses/>.
*/
#ifndef XBee_h
#define XBee_h
#if defined (SPARK)
#include "application.h"
#else
#if defined(ARDUINO) && ARDUINO >= 100
#include "Arduino.h"
#else
#include "WProgram.h"
#endif
#include <inttypes.h>
#endif //Spark
#define SERIES_1
#define SERIES_2
// set to ATAP value of XBee. AP=2 is recommended
#define ATAP 2
#define START_BYTE 0x7e
#define ESCAPE 0x7d
#define XON 0x11
#define XOFF 0x13
// This value determines the size of the byte array for receiving RX packets
// Most users won't be dealing with packets this large so you can adjust this
// value to reduce memory consumption. But, remember that
// if a RX packet exceeds this size, it cannot be parsed!
// This value is determined by the largest packet size (100 byte payload + 64-bit address + option byte and rssi byte) of a series 1 radio
#define MAX_FRAME_DATA_SIZE 110
#define BROADCAST_ADDRESS 0xffff
#define ZB_BROADCAST_ADDRESS 0xfffe
// the non-variable length of the frame data (not including frame id or api id or variable data size (e.g. payload, at command set value)
#define ZB_TX_API_LENGTH 12
#define TX_16_API_LENGTH 3
#define TX_64_API_LENGTH 9
#define AT_COMMAND_API_LENGTH 2
#define REMOTE_AT_COMMAND_API_LENGTH 13
// start/length(2)/api/frameid/checksum bytes
#define PACKET_OVERHEAD_LENGTH 6
// api is always the third byte in packet
#define API_ID_INDEX 3
// frame position of rssi byte
#define RX_16_RSSI_OFFSET 2
#define RX_64_RSSI_OFFSET 8
#define DEFAULT_FRAME_ID 1
#define NO_RESPONSE_FRAME_ID 0
// TODO put in tx16 class
#define ACK_OPTION 0
#define DISABLE_ACK_OPTION 1
#define BROADCAST_OPTION 4
// RX options
#define ZB_PACKET_ACKNOWLEDGED 0x01
#define ZB_BROADCAST_PACKET 0x02
// not everything is implemented!
/**
* Api Id constants
*/
#define TX_64_REQUEST 0x0
#define TX_16_REQUEST 0x1
#define AT_COMMAND_REQUEST 0x08
#define AT_COMMAND_QUEUE_REQUEST 0x09
#define REMOTE_AT_REQUEST 0x17
#define ZB_TX_REQUEST 0x10
#define ZB_EXPLICIT_TX_REQUEST 0x11
#define RX_64_RESPONSE 0x80
#define RX_16_RESPONSE 0x81
#define RX_64_IO_RESPONSE 0x82
#define RX_16_IO_RESPONSE 0x83
#define AT_RESPONSE 0x88
#define TX_STATUS_RESPONSE 0x89
#define MODEM_STATUS_RESPONSE 0x8a
#define ZB_RX_RESPONSE 0x90
#define ZB_EXPLICIT_RX_RESPONSE 0x91
#define ZB_TX_STATUS_RESPONSE 0x8b
#define ZB_IO_SAMPLE_RESPONSE 0x92
#define ZB_IO_NODE_IDENTIFIER_RESPONSE 0x95
#define AT_COMMAND_RESPONSE 0x88
#define REMOTE_AT_COMMAND_RESPONSE 0x97
/**
* TX STATUS constants
*/
#define SUCCESS 0x0
#define CCA_FAILURE 0x2
#define INVALID_DESTINATION_ENDPOINT_SUCCESS 0x15
#define NETWORK_ACK_FAILURE 0x21
#define NOT_JOINED_TO_NETWORK 0x22
#define SELF_ADDRESSED 0x23
#define ADDRESS_NOT_FOUND 0x24
#define ROUTE_NOT_FOUND 0x25
#define PAYLOAD_TOO_LARGE 0x74
// modem status
#define HARDWARE_RESET 0
#define WATCHDOG_TIMER_RESET 1
#define ASSOCIATED 2
#define DISASSOCIATED 3
#define SYNCHRONIZATION_LOST 4
#define COORDINATOR_REALIGNMENT 5
#define COORDINATOR_STARTED 6
#define ZB_BROADCAST_RADIUS_MAX_HOPS 0
#define ZB_TX_UNICAST 0
#define ZB_TX_BROADCAST 8
#define AT_OK 0
#define AT_ERROR 1
#define AT_INVALID_COMMAND 2
#define AT_INVALID_PARAMETER 3
#define AT_NO_RESPONSE 4
#define NO_ERROR 0
#define CHECKSUM_FAILURE 1
#define PACKET_EXCEEDS_BYTE_ARRAY_LENGTH 2
#define UNEXPECTED_START_BYTE 3
/**
* The super class of all XBee responses (RX packets)
* Users should never attempt to create an instance of this class; instead
* create an instance of a subclass
* It is recommend to reuse subclasses to conserve memory
*/
class XBeeResponse {
public:
//static const int MODEM_STATUS = 0x8a;
/**
* Default constructor
*/
XBeeResponse();
/**
* Returns Api Id of the response
*/
uint8_t getApiId();
void setApiId(uint8_t apiId);
/**
* Returns the MSB length of the packet
*/
uint8_t getMsbLength();
void setMsbLength(uint8_t msbLength);
/**
* Returns the LSB length of the packet
*/
uint8_t getLsbLength();
void setLsbLength(uint8_t lsbLength);
/**
* Returns the packet checksum
*/
uint8_t getChecksum();
void setChecksum(uint8_t checksum);
/**
* Returns the length of the frame data: all bytes after the api id, and prior to the checksum
* Note up to release 0.1.2, this was incorrectly including the checksum in the length.
*/
uint8_t getFrameDataLength();
void setFrameData(uint8_t* frameDataPtr);
/**
* Returns the buffer that contains the response.
* Starts with byte that follows API ID and includes all bytes prior to the checksum
* Length is specified by getFrameDataLength()
* Note: Unlike Digi's definition of the frame data, this does not start with the API ID..
* The reason for this is all responses include an API ID, whereas my frame data
* includes only the API specific data.
*/
uint8_t* getFrameData();
void setFrameLength(uint8_t frameLength);
// to support future 65535 byte packets I guess
/**
* Returns the length of the packet
*/
uint16_t getPacketLength();
/**
* Resets the response to default values
*/
void reset();
/**
* Initializes the response
*/
void init();
#ifdef SERIES_2
/**
* Call with instance of ZBTxStatusResponse class only if getApiId() == ZB_TX_STATUS_RESPONSE
* to populate response
*/
void getZBTxStatusResponse(XBeeResponse &response);
/**
* Call with instance of ZBRxResponse class only if getApiId() == ZB_RX_RESPONSE
* to populate response
*/
void getZBRxResponse(XBeeResponse &response);
/**
* Call with instance of ZBRxIoSampleResponse class only if getApiId() == ZB_IO_SAMPLE_RESPONSE
* to populate response
*/
void getZBRxIoSampleResponse(XBeeResponse &response);
#endif
#ifdef SERIES_1
/**
* Call with instance of TxStatusResponse only if getApiId() == TX_STATUS_RESPONSE
*/
void getTxStatusResponse(XBeeResponse &response);
/**
* Call with instance of Rx16Response only if getApiId() == RX_16_RESPONSE
*/
void getRx16Response(XBeeResponse &response);
/**
* Call with instance of Rx64Response only if getApiId() == RX_64_RESPONSE
*/
void getRx64Response(XBeeResponse &response);
/**
* Call with instance of Rx16IoSampleResponse only if getApiId() == RX_16_IO_RESPONSE
*/
void getRx16IoSampleResponse(XBeeResponse &response);
/**
* Call with instance of Rx64IoSampleResponse only if getApiId() == RX_64_IO_RESPONSE
*/
void getRx64IoSampleResponse(XBeeResponse &response);
#endif
/**
* Call with instance of AtCommandResponse only if getApiId() == AT_COMMAND_RESPONSE
*/
void getAtCommandResponse(XBeeResponse &responses);
/**
* Call with instance of RemoteAtCommandResponse only if getApiId() == REMOTE_AT_COMMAND_RESPONSE
*/
void getRemoteAtCommandResponse(XBeeResponse &response);
/**
* Call with instance of ModemStatusResponse only if getApiId() == MODEM_STATUS_RESPONSE
*/
void getModemStatusResponse(XBeeResponse &response);
/**
* Returns true if the response has been successfully parsed and is complete and ready for use
*/
bool isAvailable();
void setAvailable(bool complete);
/**
* Returns true if the response contains errors
*/
bool isError();
/**
* Returns an error code, or zero, if successful.
* Error codes include: CHECKSUM_FAILURE, PACKET_EXCEEDS_BYTE_ARRAY_LENGTH, UNEXPECTED_START_BYTE
*/
uint8_t getErrorCode();
void setErrorCode(uint8_t errorCode);
protected:
// pointer to frameData
uint8_t* _frameDataPtr;
private:
void setCommon(XBeeResponse &target);
uint8_t _apiId;
uint8_t _msbLength;
uint8_t _lsbLength;
uint8_t _checksum;
uint8_t _frameLength;
bool _complete;
uint8_t _errorCode;
};
class XBeeAddress {
public:
XBeeAddress();
};
/**
* Represents a 64-bit XBee Address
*/
class XBeeAddress64 : public XBeeAddress {
public:
XBeeAddress64(uint32_t msb, uint32_t lsb);
XBeeAddress64();
uint32_t getMsb();
uint32_t getLsb();
void setMsb(uint32_t msb);
void setLsb(uint32_t lsb);
//bool operator==(XBeeAddress64 addr);
//bool operator!=(XBeeAddress64 addr);
private:
uint32_t _msb;
uint32_t _lsb;
};
//class XBeeAddress16 : public XBeeAddress {
//public:
// XBeeAddress16(uint16_t addr);
// XBeeAddress16();
// uint16_t getAddress();
// void setAddress(uint16_t addr);
//private:
// uint16_t _addr;
//};
/**
* This class is extended by all Responses that include a frame id
*/
class FrameIdResponse : public XBeeResponse {
public:
FrameIdResponse();
uint8_t getFrameId();
private:
uint8_t _frameId;
};
/**
* Common functionality for both Series 1 and 2 data RX data packets
*/
class RxDataResponse : public XBeeResponse {
public:
RxDataResponse();
/**
* Returns the specified index of the payload. The index may be 0 to getDataLength() - 1
* This method is deprecated; use uint8_t* getData()
*/
uint8_t getData(int index);
/**
* Returns the payload array. This may be accessed from index 0 to getDataLength() - 1
*/
uint8_t* getData();
/**
* Returns the length of the payload
*/
virtual uint8_t getDataLength() = 0;
/**
* Returns the position in the frame data where the data begins
*/
virtual uint8_t getDataOffset() = 0;
};
// getResponse to return the proper subclass:
// we maintain a pointer to each type of response, when a response is parsed, it is allocated only if NULL
// can we allocate an object in a function?
#ifdef SERIES_2
/**
* Represents a Series 2 TX status packet
*/
class ZBTxStatusResponse : public FrameIdResponse {
public:
ZBTxStatusResponse();
uint16_t getRemoteAddress();
uint8_t getTxRetryCount();
uint8_t getDeliveryStatus();
uint8_t getDiscoveryStatus();
bool isSuccess();
};
/**
* Represents a Series 2 RX packet
*/
class ZBRxResponse : public RxDataResponse {
public:
ZBRxResponse();
XBeeAddress64& getRemoteAddress64();
uint16_t getRemoteAddress16();
uint8_t getOption();
uint8_t getDataLength();
// frame position where data starts
uint8_t getDataOffset();
private:
XBeeAddress64 _remoteAddress64;
};
/**
* Represents a Series 2 RX I/O Sample packet
*/
class ZBRxIoSampleResponse : public ZBRxResponse {
public:
ZBRxIoSampleResponse();
bool containsAnalog();
bool containsDigital();
/**
* Returns true if the pin is enabled
*/
bool isAnalogEnabled(uint8_t pin);
/**
* Returns true if the pin is enabled
*/
bool isDigitalEnabled(uint8_t pin);
/**
* Returns the 10-bit analog reading of the specified pin.
* Valid pins include ADC:xxx.
*/
uint16_t getAnalog(uint8_t pin);
/**
* Returns true if the specified pin is high/on.
* Valid pins include DIO:xxx.
*/
bool isDigitalOn(uint8_t pin);
uint8_t getDigitalMaskMsb();
uint8_t getDigitalMaskLsb();
uint8_t getAnalogMask();
};
#endif
#ifdef SERIES_1
/**
* Represents a Series 1 TX Status packet
*/
class TxStatusResponse : public FrameIdResponse {
public:
TxStatusResponse();
uint8_t getStatus();
bool isSuccess();
};
/**
* Represents a Series 1 RX packet
*/
class RxResponse : public RxDataResponse {
public:
RxResponse();
// remember rssi is negative but this is unsigned byte so it's up to you to convert
uint8_t getRssi();
uint8_t getOption();
bool isAddressBroadcast();
bool isPanBroadcast();
uint8_t getDataLength();
uint8_t getDataOffset();
virtual uint8_t getRssiOffset() = 0;
};
/**
* Represents a Series 1 16-bit address RX packet
*/
class Rx16Response : public RxResponse {
public:
Rx16Response();
uint8_t getRssiOffset();
uint16_t getRemoteAddress16();
protected:
uint16_t _remoteAddress;
};
/**
* Represents a Series 1 64-bit address RX packet
*/
class Rx64Response : public RxResponse {
public:
Rx64Response();
uint8_t getRssiOffset();
XBeeAddress64& getRemoteAddress64();
private:
XBeeAddress64 _remoteAddress;
};
/**
* Represents a Series 1 RX I/O Sample packet
*/
class RxIoSampleBaseResponse : public RxResponse {
public:
RxIoSampleBaseResponse();
/**
* Returns the number of samples in this packet
*/
uint8_t getSampleSize();
bool containsAnalog();
bool containsDigital();
/**
* Returns true if the specified analog pin is enabled
*/
bool isAnalogEnabled(uint8_t pin);
/**
* Returns true if the specified digital pin is enabled
*/
bool isDigitalEnabled(uint8_t pin);
/**
* Returns the 10-bit analog reading of the specified pin.
* Valid pins include ADC:0-5. Sample index starts at 0
*/
uint16_t getAnalog(uint8_t pin, uint8_t sample);
/**
* Returns true if the specified pin is high/on.
* Valid pins include DIO:0-8. Sample index starts at 0
*/
bool isDigitalOn(uint8_t pin, uint8_t sample);
uint8_t getSampleOffset();
private:
};
class Rx16IoSampleResponse : public RxIoSampleBaseResponse {
public:
Rx16IoSampleResponse();
uint16_t getRemoteAddress16();
uint8_t getRssiOffset();
};
class Rx64IoSampleResponse : public RxIoSampleBaseResponse {
public:
Rx64IoSampleResponse();
XBeeAddress64& getRemoteAddress64();
uint8_t getRssiOffset();
private:
XBeeAddress64 _remoteAddress;
};
#endif
/**
* Represents a Modem Status RX packet
*/
class ModemStatusResponse : public XBeeResponse {
public:
ModemStatusResponse();
uint8_t getStatus();
};
/**
* Represents an AT Command RX packet
*/
class AtCommandResponse : public FrameIdResponse {
public:
AtCommandResponse();
/**
* Returns an array containing the two character command
*/
uint8_t* getCommand();
/**
* Returns the command status code.
* Zero represents a successful command
*/
uint8_t getStatus();
/**
* Returns an array containing the command value.
* This is only applicable to query commands.
*/
uint8_t* getValue();
/**
* Returns the length of the command value array.
*/
uint8_t getValueLength();
/**
* Returns true if status equals AT_OK
*/
bool isOk();
};
/**
* Represents a Remote AT Command RX packet
*/
class RemoteAtCommandResponse : public AtCommandResponse {
public:
RemoteAtCommandResponse();
/**
* Returns an array containing the two character command
*/
uint8_t* getCommand();
/**
* Returns the command status code.
* Zero represents a successful command
*/
uint8_t getStatus();
/**
* Returns an array containing the command value.
* This is only applicable to query commands.
*/
uint8_t* getValue();
/**
* Returns the length of the command value array.
*/
uint8_t getValueLength();
/**
* Returns the 16-bit address of the remote radio
*/
uint16_t getRemoteAddress16();
/**
* Returns the 64-bit address of the remote radio
*/
XBeeAddress64& getRemoteAddress64();
/**
* Returns true if command was successful
*/
bool isOk();
private:
XBeeAddress64 _remoteAddress64;
};
/**
* Super class of all XBee requests (TX packets)
* Users should never create an instance of this class; instead use an subclass of this class
* It is recommended to reuse Subclasses of the class to conserve memory
* <p/>
* This class allocates a buffer to
*/
class XBeeRequest {
public:
/**
* Constructor
* TODO make protected
*/
XBeeRequest(uint8_t apiId, uint8_t frameId);
/**
* Sets the frame id. Must be between 1 and 255 inclusive to get a TX status response.
*/
void setFrameId(uint8_t frameId);
/**
* Returns the frame id
*/
uint8_t getFrameId();
/**
* Returns the API id
*/
uint8_t getApiId();
// setting = 0 makes this a pure virtual function, meaning the subclass must implement, like abstract in java
/**
* Starting after the frame id (pos = 0) and up to but not including the checksum
* Note: Unlike Digi's definition of the frame data, this does not start with the API ID.
* The reason for this is the API ID and Frame ID are common to all requests, whereas my definition of
* frame data is only the API specific data.
*/
virtual uint8_t getFrameData(uint8_t pos) = 0;
/**
* Returns the size of the api frame (not including frame id or api id or checksum).
*/
virtual uint8_t getFrameDataLength() = 0;
//void reset();
protected:
void setApiId(uint8_t apiId);
private:
uint8_t _apiId;
uint8_t _frameId;
};
// TODO add reset/clear method since responses are often reused
/**
* Primary interface for communicating with an XBee Radio.
* This class provides methods for sending and receiving packets with an XBee radio via the serial port.
* The XBee radio must be configured in API (packet) mode (AP=2)
* in order to use this software.
* <p/>
* Since this code is designed to run on a microcontroller, with only one thread, you are responsible for reading the
* data off the serial buffer in a timely manner. This involves a call to a variant of readPacket(...).
* If your serial port is receiving data faster than you are reading, you can expect to lose packets.
* Arduino only has a 128 byte serial buffer so it can easily overflow if two or more packets arrive
* without a call to readPacket(...)
* <p/>
* In order to conserve resources, this class only supports storing one response packet in memory at a time.
* This means that you must fully consume the packet prior to calling readPacket(...), because calling
* readPacket(...) overwrites the previous response.
* <p/>
* This class creates an array of size MAX_FRAME_DATA_SIZE for storing the response packet. You may want
* to adjust this value to conserve memory.
*
* \author Andrew Rapp
*/
class XBee {
public:
XBee();
/**
* Reads all available serial bytes until a packet is parsed, an error occurs, or the buffer is empty.
* You may call <i>xbee</i>.getResponse().isAvailable() after calling this method to determine if
* a packet is ready, or <i>xbee</i>.getResponse().isError() to determine if
* a error occurred.
* <p/>
* This method should always return quickly since it does not wait for serial data to arrive.
* You will want to use this method if you are doing other timely stuff in your loop, where
* a delay would cause problems.
* NOTE: calling this method resets the current response, so make sure you first consume the
* current response
*/
void readPacket();
/**
* Waits a maximum of <i>timeout</i> milliseconds for a response packet before timing out; returns true if packet is read.
* Returns false if timeout or error occurs.
*/
bool readPacket(int timeout);
/**
* Reads until a packet is received or an error occurs.
* Caution: use this carefully since if you don't get a response, your Arduino code will hang on this
* call forever!! often it's better to use a timeout: readPacket(int)
*/
void readPacketUntilAvailable();
/**
* Starts the serial connection on the specified serial port
*/
void begin(Stream &serial);
void getResponse(XBeeResponse &response);
/**
* Returns a reference to the current response
* Note: once readPacket is called again this response will be overwritten!
*/
XBeeResponse& getResponse();
/**
* Sends a XBeeRequest (TX packet) out the serial port
*/
void send(XBeeRequest &request);
//uint8_t sendAndWaitForResponse(XBeeRequest &request, int timeout);
/**
* Returns a sequential frame id between 1 and 255
*/
uint8_t getNextFrameId();
/**
* Specify the serial port. Only relevant for Arduinos that support multiple serial ports (e.g. Mega)
*/
void setSerial(Stream &serial);
private:
bool available();
uint8_t read();
void flush();
void write(uint8_t val);
void sendByte(uint8_t b, bool escape);
void resetResponse();
XBeeResponse _response;
bool _escape;
// current packet position for response. just a state variable for packet parsing and has no relevance for the response otherwise
uint8_t _pos;
// last byte read
uint8_t b;
uint8_t _checksumTotal;
uint8_t _nextFrameId;
// buffer for incoming RX packets. holds only the api specific frame data, starting after the api id byte and prior to checksum
uint8_t _responseFrameData[MAX_FRAME_DATA_SIZE];
Stream* _serial;
};
/**
* All TX packets that support payloads extend this class
*/
class PayloadRequest : public XBeeRequest {
public:
PayloadRequest(uint8_t apiId, uint8_t frameId, uint8_t *payload, uint8_t payloadLength);
/**
* Returns the payload of the packet, if not null
*/
uint8_t* getPayload();
/**
* Sets the payload array
*/
void setPayload(uint8_t* payloadPtr);
/**
* Returns the length of the payload array, as specified by the user.
*/
uint8_t getPayloadLength();
/**
* Sets the length of the payload to include in the request. For example if the payload array
* is 50 bytes and you only want the first 10 to be included in the packet, set the length to 10.
* Length must be <= to the array length.
*/
void setPayloadLength(uint8_t payloadLength);
private:
uint8_t* _payloadPtr;
uint8_t _payloadLength;
};
#ifdef SERIES_1
/**
* Represents a Series 1 TX packet that corresponds to Api Id: TX_16_REQUEST
* <p/>
* Be careful not to send a data array larger than the max packet size of your radio.
* This class does not perform any validation of packet size and there will be no indication
* if the packet is too large, other than you will not get a TX Status response.
* The datasheet says 100 bytes is the maximum, although that could change in future firmware.
*/
class Tx16Request : public PayloadRequest {
public:
Tx16Request(uint16_t addr16, uint8_t option, uint8_t *payload, uint8_t payloadLength, uint8_t frameId);
/**
* Creates a Unicast Tx16Request with the ACK option and DEFAULT_FRAME_ID
*/
Tx16Request(uint16_t addr16, uint8_t *payload, uint8_t payloadLength);
/**
* Creates a default instance of this class. At a minimum you must specify
* a payload, payload length and a destination address before sending this request.
*/
Tx16Request();
uint16_t getAddress16();
void setAddress16(uint16_t addr16);
uint8_t getOption();
void setOption(uint8_t option);
uint8_t getFrameData(uint8_t pos);
uint8_t getFrameDataLength();
protected:
private:
uint16_t _addr16;
uint8_t _option;
};
/**
* Represents a Series 1 TX packet that corresponds to Api Id: TX_64_REQUEST
*
* Be careful not to send a data array larger than the max packet size of your radio.
* This class does not perform any validation of packet size and there will be no indication
* if the packet is too large, other than you will not get a TX Status response.
* The datasheet says 100 bytes is the maximum, although that could change in future firmware.
*/
class Tx64Request : public PayloadRequest {
public:
Tx64Request(XBeeAddress64 &addr64, uint8_t option, uint8_t *payload, uint8_t payloadLength, uint8_t frameId);
/**
* Creates a unicast Tx64Request with the ACK option and DEFAULT_FRAME_ID
*/
Tx64Request(XBeeAddress64 &addr64, uint8_t *payload, uint8_t payloadLength);
/**
* Creates a default instance of this class. At a minimum you must specify
* a payload, payload length and a destination address before sending this request.
*/
Tx64Request();
XBeeAddress64& getAddress64();
void setAddress64(XBeeAddress64& addr64);
// TODO move option to superclass
uint8_t getOption();
void setOption(uint8_t option);
uint8_t getFrameData(uint8_t pos);
uint8_t getFrameDataLength();
private:
XBeeAddress64 _addr64;
uint8_t _option;
};
#endif
#ifdef SERIES_2
/**
* Represents a Series 2 TX packet that corresponds to Api Id: ZB_TX_REQUEST
*
* Be careful not to send a data array larger than the max packet size of your radio.
* This class does not perform any validation of packet size and there will be no indication
* if the packet is too large, other than you will not get a TX Status response.
* The datasheet says 72 bytes is the maximum for ZNet firmware and ZB Pro firmware provides
* the ATNP command to get the max supported payload size. This command is useful since the
* maximum payload size varies according to certain settings, such as encryption.
* ZB Pro firmware provides a PAYLOAD_TOO_LARGE that is returned if payload size
* exceeds the maximum.
*/
class ZBTxRequest : public PayloadRequest {
public:
/**
* Creates a unicast ZBTxRequest with the ACK option and DEFAULT_FRAME_ID
*/
ZBTxRequest(XBeeAddress64 &addr64, uint8_t *payload, uint8_t payloadLength);
ZBTxRequest(XBeeAddress64 &addr64, uint16_t addr16, uint8_t broadcastRadius, uint8_t option, uint8_t *payload, uint8_t payloadLength, uint8_t frameId);
/**
* Creates a default instance of this class. At a minimum you must specify
* a payload, payload length and a destination address before sending this request.
*/
ZBTxRequest();
XBeeAddress64& getAddress64();
uint16_t getAddress16();
uint8_t getBroadcastRadius();
uint8_t getOption();
void setAddress64(XBeeAddress64& addr64);
void setAddress16(uint16_t addr16);
void setBroadcastRadius(uint8_t broadcastRadius);
void setOption(uint8_t option);
protected:
// declare virtual functions
uint8_t getFrameData(uint8_t pos);
uint8_t getFrameDataLength();
private:
XBeeAddress64 _addr64;
uint16_t _addr16;
uint8_t _broadcastRadius;
uint8_t _option;
};
#endif
/**
* Represents an AT Command TX packet
* The command is used to configure the serially connected XBee radio
*/
class AtCommandRequest : public XBeeRequest {
public:
AtCommandRequest();
AtCommandRequest(uint8_t *command);
AtCommandRequest(uint8_t *command, uint8_t *commandValue, uint8_t commandValueLength);
uint8_t getFrameData(uint8_t pos);
uint8_t getFrameDataLength();
uint8_t* getCommand();
void setCommand(uint8_t* command);
uint8_t* getCommandValue();
void setCommandValue(uint8_t* command);
uint8_t getCommandValueLength();
void setCommandValueLength(uint8_t length);
/**
* Clears the optional commandValue and commandValueLength so that a query may be sent
*/
void clearCommandValue();
//void reset();
private:
uint8_t *_command;
uint8_t *_commandValue;
uint8_t _commandValueLength;
};
/**
* Represents an Remote AT Command TX packet
* The command is used to configure a remote XBee radio
*/
class RemoteAtCommandRequest : public AtCommandRequest {
public:
RemoteAtCommandRequest();
/**
* Creates a RemoteAtCommandRequest with 16-bit address to set a command.
* 64-bit address defaults to broadcast and applyChanges is true.
*/
RemoteAtCommandRequest(uint16_t remoteAddress16, uint8_t *command, uint8_t *commandValue, uint8_t commandValueLength);
/**
* Creates a RemoteAtCommandRequest with 16-bit address to query a command.
* 64-bit address defaults to broadcast and applyChanges is true.
*/
RemoteAtCommandRequest(uint16_t remoteAddress16, uint8_t *command);
/**
* Creates a RemoteAtCommandRequest with 64-bit address to set a command.
* 16-bit address defaults to broadcast and applyChanges is true.
*/
RemoteAtCommandRequest(XBeeAddress64 &remoteAddress64, uint8_t *command, uint8_t *commandValue, uint8_t commandValueLength);
/**
* Creates a RemoteAtCommandRequest with 16-bit address to query a command.
* 16-bit address defaults to broadcast and applyChanges is true.
*/
RemoteAtCommandRequest(XBeeAddress64 &remoteAddress64, uint8_t *command);
uint16_t getRemoteAddress16();
void setRemoteAddress16(uint16_t remoteAddress16);
XBeeAddress64& getRemoteAddress64();
void setRemoteAddress64(XBeeAddress64 &remoteAddress64);
bool getApplyChanges();
void setApplyChanges(bool applyChanges);
uint8_t getFrameData(uint8_t pos);
uint8_t getFrameDataLength();
static XBeeAddress64 broadcastAddress64;
// static uint16_t broadcast16Address;
private:
XBeeAddress64 _remoteAddress64;
uint16_t _remoteAddress16;
bool _applyChanges;
};
#endif //XBee_h
XBee.cpp
C/C++"https://github.com/krvarma/Spark_XBee_Remote_Door_Monitor"
Xbee library - "https://github.com/pkourany/XBee_Library"
/**
* Copyright (c) 2009 Andrew Rapp. All rights reserved.
*
* This file is part of XBee-Arduino.
*
* XBee-Arduino is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* XBee-Arduino is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with XBee-Arduino. If not, see <http://www.gnu.org/licenses/>.
*/
#include "XBee.h"
#if !defined (SPARK)
#if defined(ARDUINO) && ARDUINO >= 100
#include "Arduino.h"
#else
#include "WProgram.h"
#endif
#include "HardwareSerial.h"
#endif //Spark
XBeeResponse::XBeeResponse() {
}
uint8_t XBeeResponse::getApiId() {
return _apiId;
}
void XBeeResponse::setApiId(uint8_t apiId) {
_apiId = apiId;
}
uint8_t XBeeResponse::getMsbLength() {
return _msbLength;
}
void XBeeResponse::setMsbLength(uint8_t msbLength) {
_msbLength = msbLength;
}
uint8_t XBeeResponse::getLsbLength() {
return _lsbLength;
}
void XBeeResponse::setLsbLength(uint8_t lsbLength) {
_lsbLength = lsbLength;
}
uint8_t XBeeResponse::getChecksum() {
return _checksum;
}
void XBeeResponse::setChecksum(uint8_t checksum) {
_checksum = checksum;
}
uint8_t XBeeResponse::getFrameDataLength() {
return _frameLength;
}
void XBeeResponse::setFrameLength(uint8_t frameLength) {
_frameLength = frameLength;
}
bool XBeeResponse::isAvailable() {
return _complete;
}
void XBeeResponse::setAvailable(bool complete) {
_complete = complete;
}
bool XBeeResponse::isError() {
return _errorCode > 0;
}
uint8_t XBeeResponse::getErrorCode() {
return _errorCode;
}
void XBeeResponse::setErrorCode(uint8_t errorCode) {
_errorCode = errorCode;
}
// copy common fields from xbee response to target response
void XBeeResponse::setCommon(XBeeResponse &target) {
target.setApiId(getApiId());
target.setAvailable(isAvailable());
target.setChecksum(getChecksum());
target.setErrorCode(getErrorCode());
target.setFrameLength(getFrameDataLength());
target.setMsbLength(getMsbLength());
target.setLsbLength(getLsbLength());
}
#ifdef SERIES_2
ZBTxStatusResponse::ZBTxStatusResponse() : FrameIdResponse() {
}
uint16_t ZBTxStatusResponse::getRemoteAddress() {
return (getFrameData()[1] << 8) + getFrameData()[2];
}
uint8_t ZBTxStatusResponse::getTxRetryCount() {
return getFrameData()[3];
}
uint8_t ZBTxStatusResponse::getDeliveryStatus() {
return getFrameData()[4];
}
uint8_t ZBTxStatusResponse::getDiscoveryStatus() {
return getFrameData()[5];
}
bool ZBTxStatusResponse::isSuccess() {
return getDeliveryStatus() == SUCCESS;
}
void XBeeResponse::getZBTxStatusResponse(XBeeResponse &zbXBeeResponse) {
// way off?
ZBTxStatusResponse* zb = static_cast<ZBTxStatusResponse*>(&zbXBeeResponse);
// pass pointer array to subclass
zb->setFrameData(getFrameData());
setCommon(zbXBeeResponse);
}
ZBRxResponse::ZBRxResponse(): RxDataResponse() {
_remoteAddress64 = XBeeAddress64();
}
uint16_t ZBRxResponse::getRemoteAddress16() {
return (getFrameData()[8] << 8) + getFrameData()[9];
}
uint8_t ZBRxResponse::getOption() {
return getFrameData()[10];
}
// markers to read data from packet array. this is the index, so the 12th item in the array
uint8_t ZBRxResponse::getDataOffset() {
return 11;
}
uint8_t ZBRxResponse::getDataLength() {
return getPacketLength() - getDataOffset() - 1;
}
XBeeAddress64& ZBRxResponse::getRemoteAddress64() {
return _remoteAddress64;
}
void XBeeResponse::getZBRxResponse(XBeeResponse &rxResponse) {
ZBRxResponse* zb = static_cast<ZBRxResponse*>(&rxResponse);
//TODO verify response api id matches this api for this response
// pass pointer array to subclass
zb->setFrameData(getFrameData());
setCommon(rxResponse);
zb->getRemoteAddress64().setMsb((uint32_t(getFrameData()[0]) << 24) + (uint32_t(getFrameData()[1]) << 16) + (uint16_t(getFrameData()[2]) << 8) + getFrameData()[3]);
zb->getRemoteAddress64().setLsb((uint32_t(getFrameData()[4]) << 24) + (uint32_t(getFrameData()[5]) << 16) + (uint16_t(getFrameData()[6]) << 8) + (getFrameData()[7]));
}
ZBRxIoSampleResponse::ZBRxIoSampleResponse() : ZBRxResponse() {
}
// 64 + 16 addresses, sample size, option = 12 (index 11), so this starts at 12
uint8_t ZBRxIoSampleResponse::getDigitalMaskMsb() {
return getFrameData()[12] & 0x1c;
}
uint8_t ZBRxIoSampleResponse::getDigitalMaskLsb() {
return getFrameData()[13];
}
uint8_t ZBRxIoSampleResponse::getAnalogMask() {
return getFrameData()[14] & 0x8f;
}
bool ZBRxIoSampleResponse::containsAnalog() {
return getAnalogMask() > 0;
}
bool ZBRxIoSampleResponse::containsDigital() {
return getDigitalMaskMsb() > 0 || getDigitalMaskLsb() > 0;
}
bool ZBRxIoSampleResponse::isAnalogEnabled(uint8_t pin) {
return ((getAnalogMask() >> pin) & 1) == 1;
}
bool ZBRxIoSampleResponse::isDigitalEnabled(uint8_t pin) {
if (pin <= 7) {
// added extra parens to calm avr compiler
return ((getDigitalMaskLsb() >> pin) & 1) == 1;
} else {
return ((getDigitalMaskMsb() >> (pin - 8)) & 1) == 1;
}
}
uint16_t ZBRxIoSampleResponse::getAnalog(uint8_t pin) {
// analog starts 13 bytes after sample size, if no dio enabled
uint8_t start = 15;
if (containsDigital()) {
// make room for digital i/o
start+=2;
}
// std::cout << "spacing is " << static_cast<unsigned int>(spacing) << std::endl;
// start depends on how many pins before this pin are enabled
for (int i = 0; i < pin; i++) {
if (isAnalogEnabled(i)) {
start+=2;
}
}
// std::cout << "start for analog pin ["<< static_cast<unsigned int>(pin) << "]/sample " << static_cast<unsigned int>(sample) << " is " << static_cast<unsigned int>(start) << std::endl;
// std::cout << "returning index " << static_cast<unsigned int>(getSampleOffset() + start) << " and index " << static_cast<unsigned int>(getSampleOffset() + start + 1) << ", val is " << static_cast<unsigned int>(getFrameData()[getSampleOffset() + start] << 8) << " and " << + static_cast<unsigned int>(getFrameData()[getSampleOffset() + start + 1]) << std::endl;
return (uint16_t)((getFrameData()[start] << 8) + getFrameData()[start + 1]);
}
bool ZBRxIoSampleResponse::isDigitalOn(uint8_t pin) {
if (pin <= 7) {
// D0-7
// DIO LSB is index 5
return ((getFrameData()[16] >> pin) & 1) == 1;
} else {
// D10-12
// DIO MSB is index 4
return ((getFrameData()[15] >> (pin - 8)) & 1) == 1;
}
}
void XBeeResponse::getZBRxIoSampleResponse(XBeeResponse &response) {
ZBRxIoSampleResponse* zb = static_cast<ZBRxIoSampleResponse*>(&response);
// pass pointer array to subclass
zb->setFrameData(getFrameData());
setCommon(response);
zb->getRemoteAddress64().setMsb((uint32_t(getFrameData()[0]) << 24) + (uint32_t(getFrameData()[1]) << 16) + (uint16_t(getFrameData()[2]) << 8) + getFrameData()[3]);
zb->getRemoteAddress64().setLsb((uint32_t(getFrameData()[4]) << 24) + (uint32_t(getFrameData()[5]) << 16) + (uint16_t(getFrameData()[6]) << 8) + (getFrameData()[7]));
}
#endif
#ifdef SERIES_1
RxResponse::RxResponse() : RxDataResponse() {
}
uint16_t Rx16Response::getRemoteAddress16() {
return (getFrameData()[0] << 8) + getFrameData()[1];
}
XBeeAddress64& Rx64Response::getRemoteAddress64() {
return _remoteAddress;
}
Rx64Response::Rx64Response() : RxResponse() {
_remoteAddress = XBeeAddress64();
}
Rx16Response::Rx16Response() : RxResponse() {
}
RxIoSampleBaseResponse::RxIoSampleBaseResponse() : RxResponse() {
}
uint8_t RxIoSampleBaseResponse::getSampleOffset() {
// sample starts 2 bytes after rssi
return getRssiOffset() + 2;
}
uint8_t RxIoSampleBaseResponse::getSampleSize() {
return getFrameData()[getSampleOffset()];
}
bool RxIoSampleBaseResponse::containsAnalog() {
return (getFrameData()[getSampleOffset() + 1] & 0x7e) > 0;
}
bool RxIoSampleBaseResponse::containsDigital() {
return (getFrameData()[getSampleOffset() + 1] & 0x1) > 0 || getFrameData()[getSampleOffset() + 2] > 0;
}
//uint16_t RxIoSampleBaseResponse::getAnalog0(uint8_t sample) {
// return getAnalog(0, sample);
//}
bool RxIoSampleBaseResponse::isAnalogEnabled(uint8_t pin) {
return (((getFrameData()[getSampleOffset() + 1] >> (pin + 1)) & 1) == 1);
}
bool RxIoSampleBaseResponse::isDigitalEnabled(uint8_t pin) {
if (pin < 8) {
return ((getFrameData()[getSampleOffset() + 4] >> pin) & 1) == 1;
} else {
return (getFrameData()[getSampleOffset() + 3] & 1) == 1;
}
}
// // verified (from XBee-API)
// private int getSampleWidth() {
// int width = 0;
//
// // width of sample depends on how many I/O pins are enabled. add one for each analog that's enabled
// for (int i = 0; i <= 5; i++) {
// if (isAnalogEnabled(i)) {
// // each analog is two bytes
// width+=2;
// }
// }
//
// if (this.containsDigital()) {
// // digital enabled takes two bytes, no matter how many pins enabled
// width+= 2;
// }
//
// return width;
// }
//
// private int getStartIndex() {
//
// int startIndex;
//
// if (this.getSourceAddress() instanceof XBeeAddress16) {
// // 16 bit
// startIndex = 7;
// } else {
// // 64 bit
// startIndex = 13;
// }
//
// return startIndex;
// }
//
// public int getDigitalMsb(int sample) {
// // msb digital always starts 3 bytes after sample size
// return this.getProcessedPacketBytes()[this.getStartIndex() + 3 + this.getSampleWidth() * sample];
// }
//
// public int getDigitalLsb(int sample) {
// return this.getProcessedPacketBytes()[this.getStartIndex() + 3 + this.getSampleWidth() * sample + 1];
// }
//
// public Boolean isDigitalOn(int pin, int sample) {
//
// if (sample < 0 || sample >= this.getSampleSize()) {
// throw new IllegalArgumentException("invalid sample size: " + sample);
// }
//
// if (!this.containsDigital()) {
// throw new RuntimeException("Digital is not enabled");
// }
//
// if (pin >= 0 && pin < 8) {
// return ((this.getDigitalLsb(sample) >> pin) & 1) == 1;
// } else if (pin == 8) {
// // uses msb dio line
// return (this.getDigitalMsb(sample) & 1) == 1;
// } else {
// throw new IllegalArgumentException("Invalid pin: " + pin);
// }
// }
//
// public Integer getAnalog(int pin, int sample) {
//
// if (sample < 0 || sample >= this.getSampleSize()) {
// throw new IllegalArgumentException("invalid sample size: " + sample);
// }
//
// // analog starts 3 bytes after start of sample, if no dio enabled
// int startIndex = this.getStartIndex() + 3;
//
// if (this.containsDigital()) {
// // make room for digital i/o sample (2 bytes per sample)
// startIndex+= 2;
// }
//
// startIndex+= this.getSampleWidth() * sample;
//
// // start depends on how many pins before this pin are enabled
// // this will throw illegalargumentexception if invalid pin
// for (int i = 0; i < pin; i++) {
// if (isAnalogEnabled(i)) {
// startIndex+=2;
// }
// }
//
// return (this.getProcessedPacketBytes()[startIndex] << 8) + this.getProcessedPacketBytes()[startIndex + 1];
// }
// THIS IS WRONG
uint16_t RxIoSampleBaseResponse::getAnalog(uint8_t pin, uint8_t sample) {
// analog starts 3 bytes after sample size, if no dio enabled
uint8_t start = 3;
if (containsDigital()) {
// make room for digital i/o sample (2 bytes per sample)
start+=2*(sample + 1);
}
uint8_t spacing = 0;
// spacing between samples depends on how many are enabled. add one for each analog that's enabled
for (int i = 0; i <= 5; i++) {
if (isAnalogEnabled(i)) {
// each analog is two bytes
spacing+=2;
}
}
// std::cout << "spacing is " << static_cast<unsigned int>(spacing) << std::endl;
// start depends on how many pins before this pin are enabled
for (int i = 0; i < pin; i++) {
if (isAnalogEnabled(i)) {
start+=2;
}
}
start+= sample * spacing;
// std::cout << "start for analog pin ["<< static_cast<unsigned int>(pin) << "]/sample " << static_cast<unsigned int>(sample) << " is " << static_cast<unsigned int>(start) << std::endl;
// std::cout << "returning index " << static_cast<unsigned int>(getSampleOffset() + start) << " and index " << static_cast<unsigned int>(getSampleOffset() + start + 1) << ", val is " << static_cast<unsigned int>(getFrameData()[getSampleOffset() + start] << 8) << " and " << + static_cast<unsigned int>(getFrameData()[getSampleOffset() + start + 1]) << std::endl;
return (uint16_t)((getFrameData()[getSampleOffset() + start] << 8) + getFrameData()[getSampleOffset() + start + 1]);
}
bool RxIoSampleBaseResponse::isDigitalOn(uint8_t pin, uint8_t sample) {
if (pin < 8) {
return ((getFrameData()[getSampleOffset() + 4] >> pin) & 1) == 1;
} else {
return (getFrameData()[getSampleOffset() + 3] & 1) == 1;
}
}
//bool RxIoSampleBaseResponse::isDigital0On(uint8_t sample) {
// return isDigitalOn(0, sample);
//}
Rx16IoSampleResponse::Rx16IoSampleResponse() : RxIoSampleBaseResponse() {
}
uint16_t Rx16IoSampleResponse::getRemoteAddress16() {
return (uint16_t)((getFrameData()[0] << 8) + getFrameData()[1]);
}
uint8_t Rx16IoSampleResponse::getRssiOffset() {
return 2;
}
void XBeeResponse::getRx16IoSampleResponse(XBeeResponse &response) {
Rx16IoSampleResponse* rx = static_cast<Rx16IoSampleResponse*>(&response);
rx->setFrameData(getFrameData());
setCommon(response);
}
Rx64IoSampleResponse::Rx64IoSampleResponse() : RxIoSampleBaseResponse() {
_remoteAddress = XBeeAddress64();
}
XBeeAddress64& Rx64IoSampleResponse::getRemoteAddress64() {
return _remoteAddress;
}
uint8_t Rx64IoSampleResponse::getRssiOffset() {
return 8;
}
void XBeeResponse::getRx64IoSampleResponse(XBeeResponse &response) {
Rx64IoSampleResponse* rx = static_cast<Rx64IoSampleResponse*>(&response);
rx->setFrameData(getFrameData());
setCommon(response);
rx->getRemoteAddress64().setMsb((uint32_t(getFrameData()[0]) << 24) + (uint32_t(getFrameData()[1]) << 16) + (uint16_t(getFrameData()[2]) << 8) + getFrameData()[3]);
rx->getRemoteAddress64().setLsb((uint32_t(getFrameData()[4]) << 24) + (uint32_t(getFrameData()[5]) << 16) + (uint16_t(getFrameData()[6]) << 8) + getFrameData()[7]);
}
TxStatusResponse::TxStatusResponse() : FrameIdResponse() {
}
uint8_t TxStatusResponse::getStatus() {
return getFrameData()[1];
}
bool TxStatusResponse::isSuccess() {
return getStatus() == SUCCESS;
}
void XBeeResponse::getTxStatusResponse(XBeeResponse &txResponse) {
TxStatusResponse* txStatus = static_cast<TxStatusResponse*>(&txResponse);
// pass pointer array to subclass
txStatus->setFrameData(getFrameData());
setCommon(txResponse);
}
uint8_t RxResponse::getRssi() {
return getFrameData()[getRssiOffset()];
}
uint8_t RxResponse::getOption() {
return getFrameData()[getRssiOffset() + 1];
}
bool RxResponse::isAddressBroadcast() {
return (getOption() & 2) == 2;
}
bool RxResponse::isPanBroadcast() {
return (getOption() & 4) == 4;
}
uint8_t RxResponse::getDataLength() {
return getPacketLength() - getDataOffset() - 1;
}
uint8_t RxResponse::getDataOffset() {
return getRssiOffset() + 2;
}
uint8_t Rx16Response::getRssiOffset() {
return RX_16_RSSI_OFFSET;
}
void XBeeResponse::getRx16Response(XBeeResponse &rx16Response) {
Rx16Response* rx16 = static_cast<Rx16Response*>(&rx16Response);
// pass pointer array to subclass
rx16->setFrameData(getFrameData());
setCommon(rx16Response);
// rx16->getRemoteAddress16().setAddress((getFrameData()[0] << 8) + getFrameData()[1]);
}
uint8_t Rx64Response::getRssiOffset() {
return RX_64_RSSI_OFFSET;
}
void XBeeResponse::getRx64Response(XBeeResponse &rx64Response) {
Rx64Response* rx64 = static_cast<Rx64Response*>(&rx64Response);
// pass pointer array to subclass
rx64->setFrameData(getFrameData());
setCommon(rx64Response);
rx64->getRemoteAddress64().setMsb((uint32_t(getFrameData()[0]) << 24) + (uint32_t(getFrameData()[1]) << 16) + (uint16_t(getFrameData()[2]) << 8) + getFrameData()[3]);
rx64->getRemoteAddress64().setLsb((uint32_t(getFrameData()[4]) << 24) + (uint32_t(getFrameData()[5]) << 16) + (uint16_t(getFrameData()[6]) << 8) + getFrameData()[7]);
}
#endif
RemoteAtCommandResponse::RemoteAtCommandResponse() : AtCommandResponse() {
}
uint8_t* RemoteAtCommandResponse::getCommand() {
return getFrameData() + 11;
}
uint8_t RemoteAtCommandResponse::getStatus() {
return getFrameData()[13];
}
bool RemoteAtCommandResponse::isOk() {
// weird c++ behavior. w/o this method, it calls AtCommandResponse::isOk(), which calls the AtCommandResponse::getStatus, not this.getStatus!!!
return getStatus() == AT_OK;
}
uint8_t RemoteAtCommandResponse::getValueLength() {
return getFrameDataLength() - 14;
}
uint8_t* RemoteAtCommandResponse::getValue() {
if (getValueLength() > 0) {
// value is only included for query commands. set commands does not return a value
return getFrameData() + 14;
}
return NULL;
}
uint16_t RemoteAtCommandResponse::getRemoteAddress16() {
return uint16_t((getFrameData()[9] << 8) + getFrameData()[10]);
}
XBeeAddress64& RemoteAtCommandResponse::getRemoteAddress64() {
return _remoteAddress64;
}
void XBeeResponse::getRemoteAtCommandResponse(XBeeResponse &response) {
// TODO no real need to cast. change arg to match expected class
RemoteAtCommandResponse* at = static_cast<RemoteAtCommandResponse*>(&response);
// pass pointer array to subclass
at->setFrameData(getFrameData());
setCommon(response);
at->getRemoteAddress64().setMsb((uint32_t(getFrameData()[1]) << 24) + (uint32_t(getFrameData()[2]) << 16) + (uint16_t(getFrameData()[3]) << 8) + getFrameData()[4]);
at->getRemoteAddress64().setLsb((uint32_t(getFrameData()[5]) << 24) + (uint32_t(getFrameData()[6]) << 16) + (uint16_t(getFrameData()[7]) << 8) + (getFrameData()[8]));
}
RxDataResponse::RxDataResponse() : XBeeResponse() {
}
uint8_t RxDataResponse::getData(int index) {
return getFrameData()[getDataOffset() + index];
}
uint8_t* RxDataResponse::getData() {
return getFrameData() + getDataOffset();
}
FrameIdResponse::FrameIdResponse() {
}
uint8_t FrameIdResponse::getFrameId() {
return getFrameData()[0];
}
ModemStatusResponse::ModemStatusResponse() {
}
uint8_t ModemStatusResponse::getStatus() {
return getFrameData()[0];
}
void XBeeResponse::getModemStatusResponse(XBeeResponse &modemStatusResponse) {
ModemStatusResponse* modem = static_cast<ModemStatusResponse*>(&modemStatusResponse);
// pass pointer array to subclass
modem->setFrameData(getFrameData());
setCommon(modemStatusResponse);
}
AtCommandResponse::AtCommandResponse() {
}
uint8_t* AtCommandResponse::getCommand() {
return getFrameData() + 1;
}
uint8_t AtCommandResponse::getStatus() {
return getFrameData()[3];
}
uint8_t AtCommandResponse::getValueLength() {
return getFrameDataLength() - 4;
}
uint8_t* AtCommandResponse::getValue() {
if (getValueLength() > 0) {
// value is only included for query commands. set commands does not return a value
return getFrameData() + 4;
}
return NULL;
}
bool AtCommandResponse::isOk() {
return getStatus() == AT_OK;
}
void XBeeResponse::getAtCommandResponse(XBeeResponse &atCommandResponse) {
AtCommandResponse* at = static_cast<AtCommandResponse*>(&atCommandResponse);
// pass pointer array to subclass
at->setFrameData(getFrameData());
setCommon(atCommandResponse);
}
uint16_t XBeeResponse::getPacketLength() {
return ((_msbLength << 8) & 0xff) + (_lsbLength & 0xff);
}
uint8_t* XBeeResponse::getFrameData() {
return _frameDataPtr;
}
void XBeeResponse::setFrameData(uint8_t* frameDataPtr) {
_frameDataPtr = frameDataPtr;
}
void XBeeResponse::init() {
_complete = false;
_errorCode = NO_ERROR;
_checksum = 0;
}
void XBeeResponse::reset() {
init();
_apiId = 0;
_msbLength = 0;
_lsbLength = 0;
_checksum = 0;
_frameLength = 0;
_errorCode = NO_ERROR;
}
void XBee::resetResponse() {
_pos = 0;
_escape = false;
_checksumTotal = 0;
_response.reset();
}
XBee::XBee(): _response(XBeeResponse()) {
_pos = 0;
_escape = false;
_checksumTotal = 0;
_nextFrameId = 0;
_response.init();
_response.setFrameData(_responseFrameData);
// Contributed by Paul Stoffregen for Teensy support
#if defined(__AVR_ATmega32U4__) || defined(__MK20DX128__) || defined(SPARK)
_serial = &Serial1;
#else
_serial = &Serial;
#endif
}
uint8_t XBee::getNextFrameId() {
_nextFrameId++;
if (_nextFrameId == 0) {
// can't send 0 because that disables status response
_nextFrameId = 1;
}
return _nextFrameId;
}
// Support for SoftwareSerial. Contributed by Paul Stoffregen
void XBee::begin(Stream &serial) {
_serial = &serial;
}
void XBee::setSerial(Stream &serial) {
_serial = &serial;
}
bool XBee::available() {
return _serial->available();
}
uint8_t XBee::read() {
return _serial->read();
}
void XBee::flush() {
_serial->flush();
}
void XBee::write(uint8_t val) {
_serial->write(val);
}
XBeeResponse& XBee::getResponse() {
return _response;
}
// TODO how to convert response to proper subclass?
void XBee::getResponse(XBeeResponse &response) {
response.setMsbLength(_response.getMsbLength());
response.setLsbLength(_response.getLsbLength());
response.setApiId(_response.getApiId());
response.setFrameLength(_response.getFrameDataLength());
response.setFrameData(_response.getFrameData());
}
void XBee::readPacketUntilAvailable() {
while (!(getResponse().isAvailable() || getResponse().isError())) {
// read some more
readPacket();
}
}
bool XBee::readPacket(int timeout) {
if (timeout < 0) {
return false;
}
unsigned long start = millis();
while (int((millis() - start)) < timeout) {
readPacket();
if (getResponse().isAvailable()) {
return true;
} else if (getResponse().isError()) {
return false;
}
}
// timed out
return false;
}
void XBee::readPacket() {
// reset previous response
if (_response.isAvailable() || _response.isError()) {
// discard previous packet and start over
resetResponse();
}
while (available()) {
b = read();
if (_pos > 0 && b == START_BYTE && ATAP == 2) {
// new packet start before previous packeted completed -- discard previous packet and start over
_response.setErrorCode(UNEXPECTED_START_BYTE);
return;
}
if (_pos > 0 && b == ESCAPE) {
if (available()) {
b = read();
b = 0x20 ^ b;
} else {
// escape byte. next byte will be
_escape = true;
continue;
}
}
if (_escape == true) {
b = 0x20 ^ b;
_escape = false;
}
// checksum includes all bytes starting with api id
if (_pos >= API_ID_INDEX) {
_checksumTotal+= b;
}
switch(_pos) {
case 0:
if (b == START_BYTE) {
_pos++;
}
break;
case 1:
// length msb
_response.setMsbLength(b);
_pos++;
break;
case 2:
// length lsb
_response.setLsbLength(b);
_pos++;
break;
case 3:
_response.setApiId(b);
_pos++;
break;
default:
// starts at fifth byte
if (_pos > MAX_FRAME_DATA_SIZE) {
// exceed max size. should never occur
_response.setErrorCode(PACKET_EXCEEDS_BYTE_ARRAY_LENGTH);
return;
}
// check if we're at the end of the packet
// packet length does not include start, length, or checksum bytes, so add 3
if (_pos == (_response.getPacketLength() + 3)) {
// verify checksum
//std::cout << "read checksum " << static_cast<unsigned int>(b) << " at pos " << static_cast<unsigned int>(_pos) << std::endl;
if ((_checksumTotal & 0xff) == 0xff) {
_response.setChecksum(b);
_response.setAvailable(true);
_response.setErrorCode(NO_ERROR);
} else {
// checksum failed
_response.setErrorCode(CHECKSUM_FAILURE);
}
// minus 4 because we start after start,msb,lsb,api and up to but not including checksum
// e.g. if frame was one byte, _pos=4 would be the byte, pos=5 is the checksum, where end stop reading
_response.setFrameLength(_pos - 4);
// reset state vars
_pos = 0;
return;
} else {
// add to packet array, starting with the fourth byte of the apiFrame
_response.getFrameData()[_pos - 4] = b;
_pos++;
}
}
}
}
// it's peanut butter jelly time!!
XBeeRequest::XBeeRequest(uint8_t apiId, uint8_t frameId) {
_apiId = apiId;
_frameId = frameId;
}
void XBeeRequest::setFrameId(uint8_t frameId) {
_frameId = frameId;
}
uint8_t XBeeRequest::getFrameId() {
return _frameId;
}
uint8_t XBeeRequest::getApiId() {
return _apiId;
}
void XBeeRequest::setApiId(uint8_t apiId) {
_apiId = apiId;
}
//void XBeeRequest::reset() {
// _frameId = DEFAULT_FRAME_ID;
//}
//uint8_t XBeeRequest::getPayloadOffset() {
// return _payloadOffset;
//}
//
//uint8_t XBeeRequest::setPayloadOffset(uint8_t payloadOffset) {
// _payloadOffset = payloadOffset;
//}
PayloadRequest::PayloadRequest(uint8_t apiId, uint8_t frameId, uint8_t *payload, uint8_t payloadLength) : XBeeRequest(apiId, frameId) {
_payloadPtr = payload;
_payloadLength = payloadLength;
...
This file has been truncated, please download it to see its full contents.
/* AUTOMATED LEVEL CROSSING
*
* CONTROLHUB Ver 1.1 JUNE 2015
*
*/
/**
COntrol hub code. This recives data from the sensors placed on the track. Depending on
the sequence of the data from sensors, concludes if a train is on track betweeen the sensors
If so, it closes the gate, rings the alarm bells and lights up the signals.
*/
/*
Uses :
Xbee library - "https://github.com/pkourany/XBee_Library"
HC library
*/
// This #include statement was automatically added by the Particle IDE.
#include "HC_SR04.h"
// This #include statement was automatically added by the Particle IDE.
#include "XBee.h"
#define TRIGPIN 5 //ultrasonic sensor trig pin
#define ECHOPIN 6 //ultrasonic sensor echo pin
#define RED 2
#define GREEN 3
int VehicleOnTrack = 0; // status of ultrsonic sensor at the level crossing. Senses if there is a vehicle stuck on the track
int trainOnTrack = 0; // Is there a train on track between the sensors on either side of the gate?
ZBRxIoSampleResponse io;
char szXBeeAddress[18];
int servoPin = 9; //pin to control servo (gate)
Servo servo; //servo object
int angle = 0; // Angle of the gate at the crossing
int reading;
int minVal = 5;
int maxVal = 500;
int sensor1Sensed = 0;
int sensor0Sensed = 0;
char xbeeaddrList[10][18]; // XBee addresses of the sensors.
int gateClosed = 0;
char SenderAddr[30];
XBee xbee; //create a xbee object
HC_SR04 rangefinder = HC_SR04(TRIGPIN, ECHOPIN);
void setup()
{
io = ZBRxIoSampleResponse();
xbee = XBee();
Serial.begin(9600);
Serial1.begin(9600);
digitalWrite(GREEN , LOW);
digitalWrite(RED , LOW);
xbee.begin(Serial1); //communicate to xbee via serial
//Spark.subscribe("closegate",gateclose,"54ff6b066672524849240167"); //subscribe to gate close event
Spark.function("gatectrl", setgate);
Spark.function("setaddr", setaddr);
}
void trainSignal(String cmd)
{
if(cmd = "RED")
{
digitalWrite(RED , HIGH);
digitalWrite(GREEN , LOW);
}
else if(cmd = "GREEN")
{
digitalWrite(RED , LOW);
digitalWrite(GREEN , HIGH);
}
}
void loop()
{
xbee.readPacket(); //check for msg from any of the sensors on the track
if (xbee.getResponse().isAvailable()) //Train has crossed one of the sensor points on the track
{
if (xbee.getResponse().getApiId() == ZB_IO_SAMPLE_RESPONSE)
{
xbee.getResponse().getZBRxIoSampleResponse(io); // Get the message from the sensor on the track through XBee
// Get the XBee address of the sensor that detected the train
sprintf(szXBeeAddress, "%08X%08X", io.getRemoteAddress64().getMsb(),io.getRemoteAddress64().getLsb());
memcpy(SenderAddr, szXBeeAddress, 16); // Holds the complete address of the XBee sensor
Serial.print(szXBeeAddress); //print the address of the xbee
Serial.print(" ");
if((memcmp(szXBeeAddress, xbeeaddrList[0], 16) == 0) && !sensor0Sensed)
{
trainOnTrack = ~trainOnTrack;
sensor0Sensed = 1;
}
if((memcmp(szXBeeAddress, xbeeaddrList[1], 16) == 0) && !sensor1Sensed)
{
trainOnTrack = ~trainOnTrack;
sensor1Sensed = 1;
}
}
if (sensor0Sensed && sensor1Sensed)
{
delay(60000);
sensor0Sensed = 0;
sensor1Sensed = 0;
trainOnTrack = 0;
}
reading = rangefinder.getDistanceCM();
if ((reading >= minVal) && (reading <= maxVal) )
VehicleOnTrack = 1; //object identified
else if (reading > maxVal)
VehicleOnTrack = 0; //no object
/* gateClosed = 0 -> open
* gateClosed = 1 -> close
*
* train on track - trainOnTrack
*
* VehicleOnTrack = 1 object identified
* VehicleOnTrack = 0 no object
*/
if( (trainOnTrack == 1) && (gateClosed == 0))
{
digitalWrite(D0,HIGH); // sound a buzzer
if(VehicleOnTrack == 0) // if no vehicle is caught on the track
{
trainSignal("GREEN");
setgate("close"); //if any of the sensor detects train close the gtate
}
else
{
trainSignal("RED");
}
digitalWrite(D0,LOW); //buzzer
delay(200);
}
else if( (trainOnTrack == 0) && (gateClosed == 1))
{
digitalWrite(D0,HIGH); //sound a buzzer
if(VehicleOnTrack == 0) // check to see if any vehicle is caught on the track
{
setgate("open"); //else open the gate for the traffic and pedestrians
trainSignal("GREEN");
}
else
trainSignal("RED");
digitalWrite(D0,LOW); //buzzer
delay(200);
}
}
}
/*open or close gate over the internet*/
int setgate(String cmd)
{
if(cmd == "open")
{
if( angle <= 90 )
{
gateClosed = 0;
/*open gate*/
for(; angle >= 0 ; angle--)
{
servo.write(angle);
delay(15);
}
}
}
else if(cmd == "close")
{
/*close gate*/
if(angle >= 0)
{
gateClosed = 1;
for(; angle > 0; angle++)
{
servo.write(angle);
delay(15);
// digitalWrite(D0,LOW); //buzzer
}
}
}
return 0;
}
/* to set the address of first xbee cmd = "1"
* second xbee cmd = "2" ...
*/
int setaddr(String cmd)
{
int sensorNum = cmd.toInt();
char addr[18];
if (xbee.getResponse().getApiId() == ZB_IO_SAMPLE_RESPONSE)
{
xbee.getResponse().getZBRxIoSampleResponse(io); //get the response from sensor xbee
sprintf(addr, "%08X%08X",io.getRemoteAddress64().getMsb(), io.getRemoteAddress64().getLsb());
memcpy(xbeeaddrList[sensorNum], szXBeeAddress, 16); // store addresses of the xbee
}
}



{kind=link}
Comments