


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
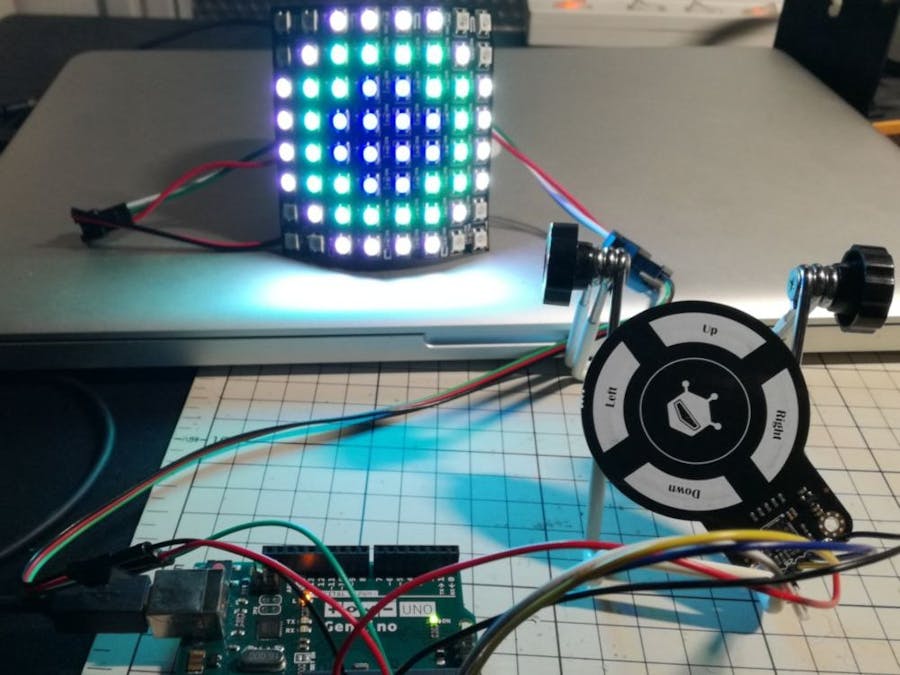
I tried controlling the display of flexible LED matrix with 3D gesture sensor.
ConfigurationDisplay the eye on the LED matrix and move with the 3D gesture sensor.
Flexible 8x8 RGB LED MatrixIt has a 8x8 full color LED (NeoPixel) and soft by flexible board. The Arduino library for Neopixels is located in the following.
https://github.com/adafruit/Adafruit_NeoPixel
Please refer below for product details.
https://www.dfrobot.com/wiki/index.php/Gravity:_Flexible_8x8_RGB_LED_Matrix_SKU:_DFR0461
3D Gesture SensorFive electrodes are arranged in the up, down, left, right and middle. Gesture is sensed by changes in electrostatic capacitance of electrodes due to hand approach.
The Arduino library for the 3D Gesture Sensor is located in the following.
https://github.com/DFRobot/DFRobot_Gesture
This gesture sensor detects clockwise/counterclockwise rotation and movement directions (up, down, left, right) using program example "_3D_Gesture_Test.ino".
Please refer below for product details.
https://www.dfrobot.com/wiki/index.php/3D_Gesture_Sensor_Mini_SKU:_SEN0202
Arduino ProgrammingDisplay the eyeball on the LED matrix, move the eyes right and left with the left and right sensing of the gesture sensor, open and close the eyelids by vertical sensing. The pupil faces the front in clockwise or counterclockwise sensing.
LED Array:
Code:
#include <Adafruit_NeoPixel.h>
#include <DFRobot_Gesture.h>
#include <Wire.h>
int sensePin= A1;
unsigned char cmd;
DFRobot_Gesture myGesture;
#define DIN A0
Adafruit_NeoPixel led = Adafruit_NeoPixel(64, DIN, NEO_GRB + NEO_KHZ800);
int LR = 5;
int eyelid = 0;
int whiteNum = 52;
int blackNum = 20;
int pupilNum = 12;
//white eye
int whiteLED[52] = { 2, 3, 4, 5, 9, 10, 11, 12, 13, 14, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31,
32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 49, 50, 51, 52, 53, 54, 58, 59, 60, 61};
//black eye
int blackLED[11][20] = {{50, 51, 52, 53, 58, 61, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64},
{42, 43, 44, 45, 49, 50, 53, 54, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64},
{34, 35, 36, 37, 41, 42, 45, 46, 49, 54, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64},
{26, 27, 28, 29, 33, 34, 37, 38, 41, 46, 54, 49, 58, 61, 61, 64, 64, 64, 64, 64},
{18, 19, 20, 21, 25, 26, 29, 30, 33, 38, 41, 46, 49, 50, 53, 54, 58, 59, 60, 61},
{10, 11, 12, 13, 17, 18, 21, 22, 25, 30, 33, 38, 41, 42, 45, 46, 50, 51, 52, 53},
{ 2, 3, 4, 5, 9, 10, 13, 14, 17, 22, 25, 30, 33, 34, 37, 38, 42, 43, 44, 45},
{ 2, 5, 9, 14, 17, 22, 25, 26, 29, 30, 34, 35, 36, 37, 64, 64, 64, 64, 64, 64},
{ 9, 14, 17, 18, 21, 22, 26, 27, 28, 29, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64},
{ 9, 10, 13, 14, 18, 19, 20, 21, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64},
{ 2, 5, 10, 11, 12, 13, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64}};
//pupil
int pupilLED[11][12] = {{59, 60, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64},
{51, 52, 58, 59, 60, 61, 64, 64, 64, 64, 64, 64},
{43, 44, 50, 51, 52, 53, 58, 59, 60, 61, 64, 64},
{35, 36, 42, 43, 44, 45, 50, 51, 52, 53, 59, 60},
{27, 28, 34, 35, 36, 37, 42, 43, 44, 45, 51, 52},
{19, 20, 26, 27, 28, 29, 34, 35, 36, 37, 43, 44},
{11, 12, 18, 19, 20, 21, 26, 27, 28, 29, 35, 36},
{ 3, 4, 10, 11, 12, 13, 18, 19, 20, 21, 27, 28},
{ 2, 3, 4, 5, 10, 11, 12, 13, 19, 20, 64, 64},
{ 2, 3, 4, 5, 11, 12, 64, 64, 64, 64, 64, 64},
{ 3, 4, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64}};
//eyelid
int eyelidNum[8] = {0,4,8,14,20,28,36,44};
int eyelidLED[56] = {23, 24, 39, 40, 22, 25, 38, 41, 9, 21, 26, 37, 42, 54, 10, 20, 27, 36, 43, 53, 5, 11,
19, 28, 35, 44, 52, 58, 4, 12, 18, 29, 34, 45, 51, 59, 3, 13, 17, 30, 33, 46, 50, 60};
void setup(){
Wire.begin(); // join i2c bus (address optional for master)
Serial.begin(115200); // start serial for output
pinMode(sensePin, INPUT);
led.begin();
led.setBrightness(100); //LED brightness 0-255
blink(LR, eyelid);
}
void loop(){
if(digitalRead(sensePin)==0){
myGesture.I2C1_MasterRead(md.buf,26,0x42); //The address is:0x42
cmd = myGesture.mgcProcMsg(); //process the message
if(cmd != GI_NOGESTURE ){
switch(cmd){
case GI_FLICK_R:
Serial.println("RIGHT");
//Move the eye right
for(int i = LR; i <= 10; i++){
blink(i, eyelid);
delay(100);
}
LR = 10;
break;
case GI_FLICK_L:
Serial.println("LEFT");
//Move the eye left
for(int i = LR; i >= 0; i--){
blink(i, eyelid);
delay(100);
}
LR = 0;
break;
case GI_FLICK_D:
Serial.println("DOWN");
//Eyelid close
for(int i = eyelid; eyelid <= 8; eyelid++){
blink(LR, eyelid);
delay(100);
}
eyelid = 8;
break;
case GI_FLICK_U:
Serial.println("UP");
//Eyelid open
for(int i = eyelid; eyelid >= 0; eyelid--){
blink(LR, eyelid);
delay(100);
}
eyelid = 0;
break;
case GI_AIRWHEEL_CW://Clockwise in circles
Serial.println("CW");
//Return eye to the front
Return();
break;
case GI_AIRWHEEL_CCW://Counterclockwise circles
Serial.println("CCW");
//Return eye to the front
Return();
break;
default: break;
}
}
}
}
void blink( int LR, int eyelid) {
if (eyelid != 8){
//white eye
for(uint16_t i=0; i<whiteNum; i++) {
led.setPixelColor(whiteLED[i], led.Color(66, 66, 66));
}
//black eye
for(uint16_t i=0; i<blackNum; i++) {
led.setPixelColor(blackLED[LR][i], led.Color(0, 177, 55));
}
//pupil
for(uint16_t i=0; i<pupilNum; i++) {
led.setPixelColor(pupilLED[LR][i], led.Color(0, 0, 66));
}
//eyelid
for(int i=0; i < eyelidNum[eyelid]; i++) {
led.setPixelColor(eyelidLED[i], 0);
}
} else if (eyelid == 8){
led.clear();
}
led.show();
}
void Return() {
if(LR == 0){
for(int i = LR; i <= 5; i++){
blink(i, eyelid);
delay(100);
}
}
if(LR == 10){
for(int i = LR; i >= 5; i--){
blink(i, eyelid);
delay(100);
}
}
LR = 5;
}




Comments