


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 24 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
HC-05 is an easy-to-use Bluetooth SPP module optimized for smooth serial wireless communication configuration. Serial port Bluetooth module is fully qualified Bluetooth V2.0+EDR (Enhanced Data Rate) 3Mbps Modulation with a total 2.4GHz radio transceiver and baseband. It uses a CSR Bluecore 04-External single-chip Bluetooth system with CMOS technology and AFH(Adaptive Frequency Hopping Feature). It has a compact footprint of 12.7mmx27mm.
HC-05 Bluetooth Module Default Settings- Default Bluetooth Name: “HC-05”
- Default Password: 1234 or 0000
- Default Communication: Slave
- Default Mode: Data Mode
Operating voltage
4V – 6V
Operating current consumption
30mA
Range
<10m
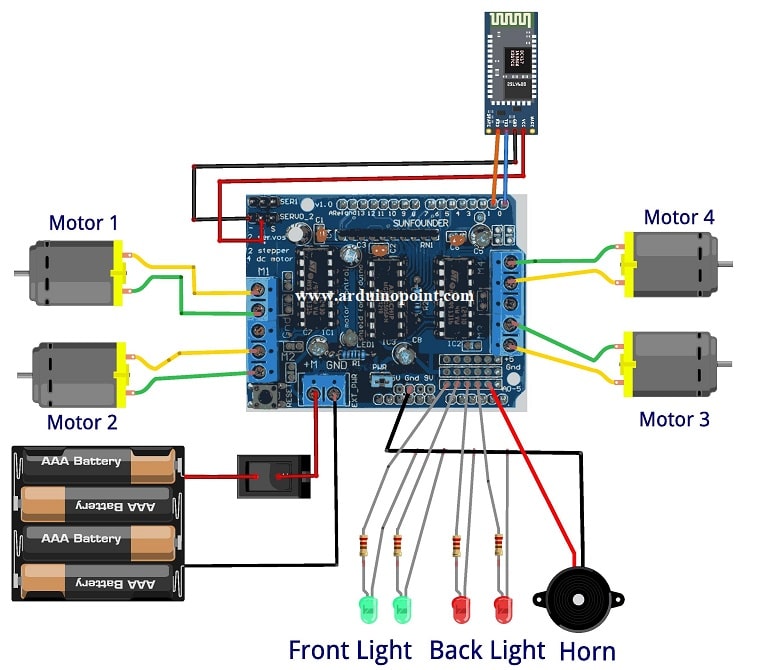
HC-05 Bluetooth Module ConnectionsHC-05 Bluetooth Module
L293D Motor Drive Shield
VCC
5V
GND
GND
TXD
Digital pin 0
RXD
Digital pin 1
L293D Motor Drive ShieldThe L293D is a dedicated module that fits in the Arduino UNO R3 Board and the Arduino MEGA board. It is a motor driver shield with a full-featured Arduino Shield that can be used to drive 2 to 6 DC motors and 4 wire Stepper motors, as well as two sets of pins to drive a SERVO.
L293D Motor Drive Shield SpecificationsOperating voltage
2.3V – 5.5V
Operating current consumption
70 – 150 µA
Operating temperature
40°C to +85°C
LED and Buzzer ConnectionsThe positive or big terminal of Front Left LED, Front Right LED, Back Right LED, Back Left LED and Buzzer connect with A0, A1, A2, A3, and A4 of the L293D Motor Drive Shield respectively. Negative or small terminal connect with GND.
Before uploading the code you have to install the "Adafruit Motor Shield" library
Open Arduino IDE >> Go to sketch >> Include Libray >> Manage Librays... >> Search "Adafruit Motor Shield" >> Install the Library
{kind=link}
Isum Sathmira
 ISUM
ISUM
Comments
Please log in or sign up to comment.