


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 9 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
The first part of our "Do more with less!" mini-series is all about pneumatics.
Pneumatic systems are great solutions, especially when a fast linear actuator is needed!The system setup is quite easy. All you need is
- a compressor
- an air tank
- a valve (mechanic or mechatronic)
- an actor (such as a cylinder)
and you are ready to rock.
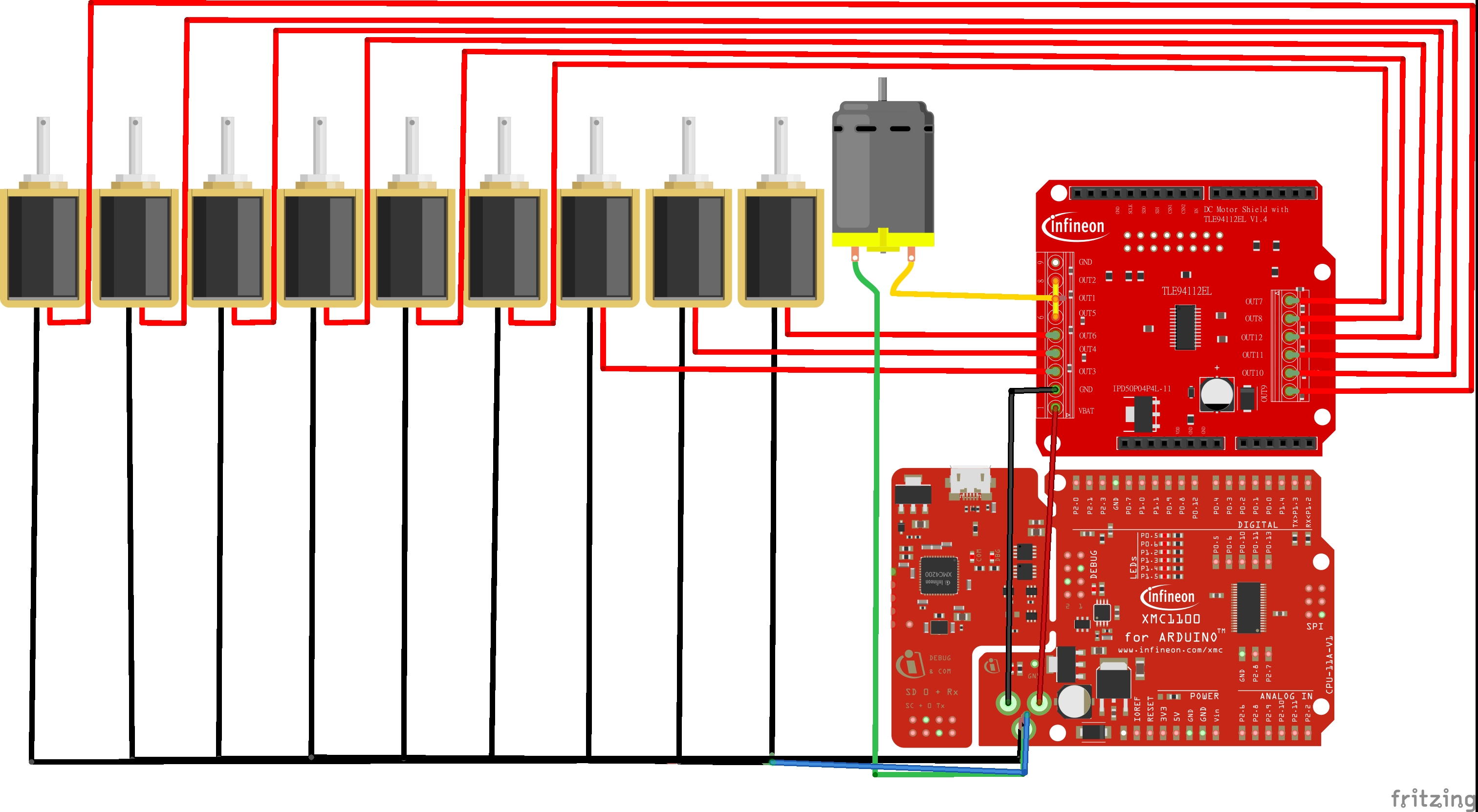
One chip to run them allA perfect solution to drive a pneumatic system is the Infineon 12-fold half-bridge driver Shield for Arduino or 12-fold half-bridge driver HAT for Raspberry Pi. Both feature the TLE94112ES multi-half-bridge IC - one driver with 12 half-bridge outputs to drive DC motors, resistive or inductive loads.
For our project we use 3 of the 12 outputs to drive our compressor. Despite the fact that it runs at quite low currents there is a current spike at startup. By using 3 channels in parallel we are on the safe side here.
The other 9 outputs are used to drive solenoid driven "pneumatic 2/3 valves". These can block air or let is pass in one way (2 status/ IN -> OUT), while the air can escape the system through a third opening in the valve (OUT -> RELEASE).
All is controlled by a XMC1100 Boot Kit (similar to an Arduino Uno) and programmed in the Arduino IDE.
The System can be wired up as following diagram shows:
We built a 3x3 array out of our 9 pneumatic actors, which are 60mm long pneumatic cylinders. They are only driven one sided - meaning the controlled valves will only push them up. To keep everything in place we laser-cutted tube and cable guides as well as our baseplate and engraved the positions of the actors on it.
Attached Arduino code will push the cylinders up in a random order every 500ms. Are you fast enough to push them down? - and can you already guess where this mini-series will lead us? ;)




{kind=link}
Comments
Please log in or sign up to comment.