


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
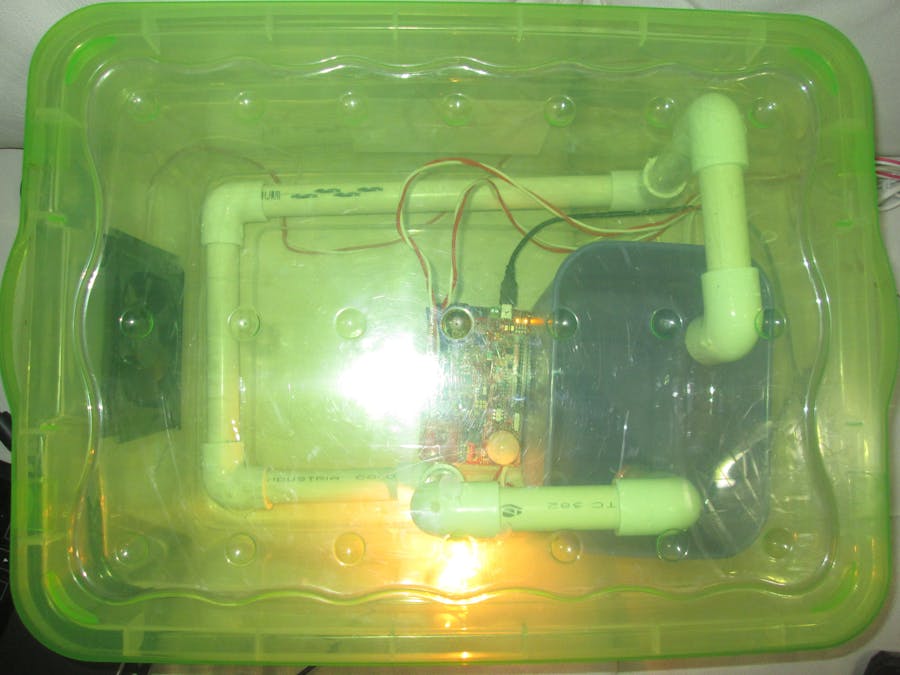
The idea is create a controlled environment to vermiculture, however the scope of this project is for any industrial process, i like to share this for all Hackster.io Users.
Construction of the structureHere i developed the code to generate the square signal and the PID controller for this plant (Code Attachment).
MATLAB Get DataMATLAB was used to get data through serial port, this data was saved on excel, this data later have been used to obtain the behavior of the plant in open loop.
With the data obtained in Excel with the MATLAB program through serial transmission, this data was analyzed with the Matlab tool "IDENT", in order to know the transfer function that models the plant.
after we have the data, we need create the vectors in this way
In these new variables will be stored the vectors to work, where "Cuadrada" is the input signal and "data" are the data obtained in the corresponding time of the signal, the values are entered as follows
After entering our data obtained through ident tool, we recognize the system worked, to do this you must select import data => Time domain data where the following menu will be displayed
In this menu should be configured the different variables that we are going to use for our case are cuadrada and data, it is also very important to take into account the sampling time of the signal obtained, for our case was 1 seconds. We obtain a new variable that for our case is called mydata
Observing that our new graph has a variation in 25.25 degrees plus or minus .25 degrees, which shows the behavior of the plant in open loop and the square signal generated by the data collection part. Now we must estimate different transfer functions by observing which one is closest to the behavior of the plant and which of these transfer functions we want to work.
In this menu we display the number of zeros and poles that we want our system to have, a comparison must be made between different transfer functions taking the function most similar to the behavior of the plant.
For development a transfer function was obtained that consisted of 1 Zero and 2 Polos, since it was the transfer function more similar to the behavior of the plant with a similarity of 72.08%.
Subsequently, we transfer our new transfer function to the MATLAB workspace where the discrete time processing is done with the transfer function.
We create the variables where we store our data to convert the format idtf to tf
After changing the format to tf, we can now pass in discrete time our transfer function by means of c2d as shown below
When discretizing we take the sampling frequency that we prefer, for the developed system is 20ms, now by means of the tool sisotool we obtain the value the following diagrams
We generate the controller for the system, in this way we obtain the following transfer function and perform the pseudocode
Now We have our pseudocodigo for PSoC program and now we can control the plant (CODE PID PSoC)
{kind=link}
{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.