


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
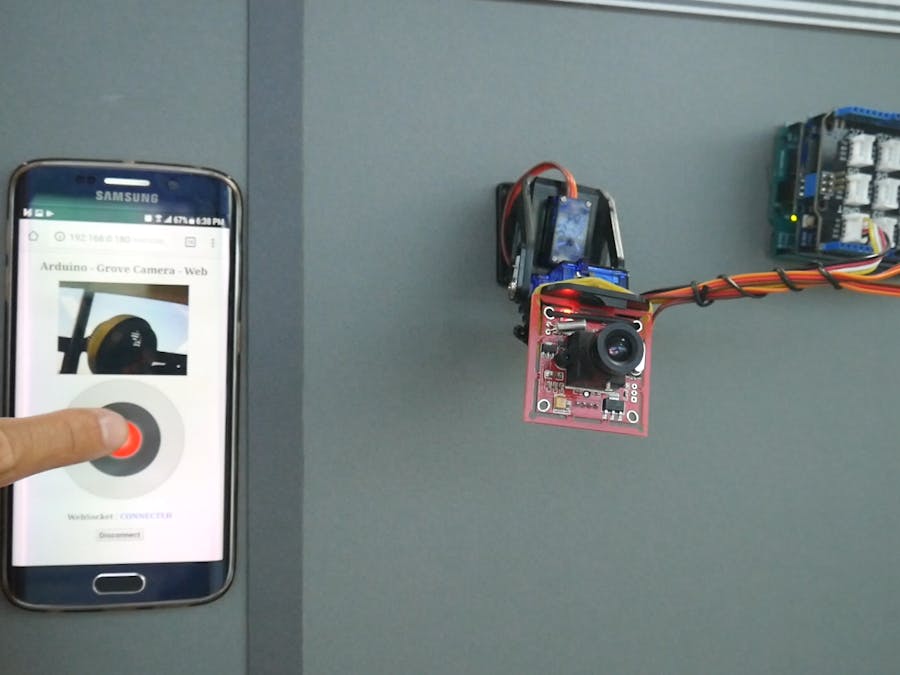
Demonstration
Read moreIf you are a beginner, I recommend reading about Arduino - Servo Motor and Arduino - Wifi.
How it worksThe following step shows data flow between Web Browser and Arduino:
- User access webpage on PHPoC Shield for Arduino via Web Browser.
- WebSocket connection is created between Arduino and Web Browser.
- Arduino reads data (image) from grove serial camera
- Arduino send the data (image) to Web Browser via websocket
- Web browser display data (image) on webpage.
- Since image is updated continuously. It looks like a live video.
- stack PHPoC Shield on Arduino
- stack grove expansion board on PHPoC Shield
- connect grove camera to UART port of Grove expansion board
There are two code parts: Arduino Code and Web User Interface code.
Arduino Code
Compile and upload code to Arduino via Arduino IDE
Web User Interface
Save this code to remote_camera.php and upload to PHPoC Shield via PHPoC Debugger according to this instruction
Setting and TestSetup network information for PHPoC [WiFi] shield via this instruction
Access web camera by typing http://ip_address/remote_camera.php
The Best Arduino Starter Kit for BeginnerSee The Best Arduino Kit for Beginners
#include "SPI.h"
#include "Phpoc.h"
#include <Servo.h>
#define PIC_PKT_LEN 256 //data length of each read, dont set this too big because ram is limited
#define CAM_ADDR 0
const byte cameraAddr = (CAM_ADDR << 5); // address
unsigned char pkt[PIC_PKT_LEN];
unsigned int pktCnt;
unsigned int lastPacketLength;
PhpocServer server(80);
PhpocClient client;
Servo servo_x;
Servo servo_y;
int current_angle_x;
int current_angle_y;
void setup(){
Serial.begin(115200);
Phpoc.begin(PF_LOG_SPI | PF_LOG_NET);
server.beginWebSocketBinary("grove_camera", "uint8.phpoc");
servo_x.attach(8); // attaches the servo on pin 8 to the servo object
servo_y.attach(9); // attaches the servo on pin 9 to the servo object
servo_x.write(90);
servo_y.write(90);
cameraInit();
client = server.available();
}
void loop(){
if(client && client.connected()){
cameraGetPicture();
for(unsigned int i = 0; i <= pktCnt; i++){
getPacket(i);
joystickLoop();
}
} else {
client = server.available();
}
}
void joystickLoop(){
String data = "";
while(1) {
String data = client.readLine();
if(data.length()){
int pos = data.indexOf(':');
long x = data.substring(0, pos).toInt();
long y = data.substring(pos+1).toInt();
// scale from [-100; 100] to [0; 180]
long angle_x = map(x, -100, 100, 0, 180);
long angle_y = map(y, -100, 100, 0, 180);
servo_x.write(angle_x);
servo_y.write(angle_y);
}
else
break;
}
}
void clearRxBuf(){
while (Serial.available()){
Serial.read();
}
}
void sendCmd(char cmd[], int cmd_len){
for (char i = 0; i < cmd_len; i++) Serial.print(cmd[i]);
}
void cameraInit(){
char cmd[] = {0xaa,0x0d|cameraAddr,0x00,0x00,0x00,0x00} ;
unsigned char resp[6];
Serial.setTimeout(500);
while (1){
sendCmd(cmd,6);
if(Serial.readBytes((char *)resp, 6) != 6)
continue;
if(resp[0] == 0xaa && resp[1] == (0x0e | cameraAddr) && resp[2] == 0x0d && resp[4] == 0 && resp[5] == 0) {
if(Serial.readBytes((char *)resp, 6) != 6) continue;
if(resp[0] == 0xaa && resp[1] == (0x0d | cameraAddr) && resp[2] == 0 && resp[3] == 0 && resp[4] == 0 && resp[5] == 0) break;
}
}
cmd[1] = 0x0e | cameraAddr;
cmd[2] = 0x0d;
sendCmd(cmd, 6);
char cmd2[] = { 0xaa, 0x01 | cameraAddr, 0x00, 0x07, 0x03, 0x05};
Serial.setTimeout(100);
while (1){
clearRxBuf();
sendCmd(cmd2, 6);
if(Serial.readBytes((char *)resp, 6) != 6) continue;
if(resp[0] == 0xaa && resp[1] == (0x0e | cameraAddr) && resp[2] == 0x01 && resp[4] == 0 && resp[5] == 0) break;
}
char cmd3[] = { 0xaa, 0x06 | cameraAddr, 0x08, PIC_PKT_LEN & 0xff, (PIC_PKT_LEN>>8) & 0xff ,0};
while (1) {
clearRxBuf();
sendCmd(cmd3, 6);
if(Serial.readBytes((char *)resp, 6) != 6) continue;
if(resp[0] == 0xaa && resp[1] == (0x0e | cameraAddr) && resp[2] == 0x06 && resp[4] == 0 && resp[5] == 0) break;
}
//Serial.println("Camera initialization done.");
}
void cameraGetPicture(){
char cmd[] = { 0xaa, 0x04 | cameraAddr, 0x01, 0x00, 0x00, 0x00 };
unsigned char resp[6];
unsigned long picTotalLen = 0; // picture length
while (1){
clearRxBuf();
sendCmd(cmd, 6);
if(Serial.readBytes((char *)resp, 6) != 6) continue;
if(resp[0] == 0xaa && resp[1] == (0x0e | cameraAddr) && resp[2] == 0x04 && resp[4] == 0 && resp[5] == 0){
Serial.setTimeout(1000);
if(Serial.readBytes((char *)resp, 6) != 6)
continue;
if(resp[0] == 0xaa && resp[1] == (0x0a | cameraAddr) && resp[2] == 0x01){
picTotalLen = (resp[3]) | (resp[4] << 8) | (resp[5] << 16);
break;
}
}
}
pktCnt = (picTotalLen) / (PIC_PKT_LEN - 6);
lastPacketLength = PIC_PKT_LEN;
if((picTotalLen % (PIC_PKT_LEN-6)) != 0){
pktCnt += 1;
lastPacketLength = picTotalLen % (PIC_PKT_LEN - 6) + 6;
}
}
void getPacket(unsigned int i){
char cmd[] = { 0xaa, 0x0e | cameraAddr, 0x00, 0x00, 0x00, 0x00 };
Serial.setTimeout(100);
if(i < pktCnt) {
cmd[4] = i & 0xff;
cmd[5] = (i >> 8) & 0xff;
clearRxBuf();
sendCmd(cmd, 6);
int pkt_len;
if(i < (pktCnt - 1))
pkt_len = PIC_PKT_LEN ;
else
pkt_len = lastPacketLength;
uint16_t cnt = Serial.readBytes((char *)pkt, pkt_len);
while(client.availableForWrite() < (cnt - 6)) // check availability of websocket tx buffer.
;
client.write((const uint8_t *)&pkt[4], cnt - 6);
} else {
cmd[4] = 0xf0;
cmd[5] = 0xf0;
sendCmd(cmd, 6);
}
}
<!DOCTYPE html>
<html>
<head>
<title>Arduino - PHPoC Shield</title>
<meta name="viewport" content="width=device-width, initial-scale=0.7, maximum-scale=0.7">
<style>
body { text-align: center; font-size: 15pt; }
h1 { font-weight: bold; font-size: 20pt; }
h2 { font-weight: bold; font-size: 15pt; }
button { font-weight: bold; font-size: 15pt; }
</style>
<script>
/* Camera variable */
var image = new Uint8Array(0);
/* Joystick variable */
var canvas_width = 500, canvas_height = 500;
var radius_base = 150;
var radius_handle = 72;
var radius_shaft = 120;
var range = canvas_width/2 - 10;
var step = 18;
var joystick = {x:0, y:0, x_percent: 0, y_percent: 0};
var click_state = 0;
var ws;
function init()
{
/* Camera setting */
var camera = document.getElementById("camera");
camera.width = "320";
camera.height = "240";
/* Joystick setting */
var ratio = 320.0 / canvas_width; // 320 is image's width
canvas_width = Math.round(canvas_width * ratio);
canvas_height = Math.round(canvas_height * ratio);
radius_base = Math.round(radius_base * ratio);
radius_handle = Math.round(radius_handle * ratio);
radius_shaft = Math.round(radius_shaft * ratio);
range = Math.round(range * ratio);
step = Math.round(step * ratio);
var canvas = document.getElementById("joystick");
canvas.width = canvas_width;
canvas.height = canvas_height;
canvas.addEventListener("touchstart", mouse_down);
canvas.addEventListener("touchend", mouse_up);
canvas.addEventListener("touchmove", mouse_move);
canvas.addEventListener("mousedown", mouse_down);
canvas.addEventListener("mouseup", mouse_up);
canvas.addEventListener("mousemove", mouse_move);
var ctx = canvas.getContext("2d");
ctx.translate(canvas_width/2, canvas_height/2);
ctx.shadowBlur = 20;
ctx.shadowColor = "LightGray";
ctx.lineCap="round";
ctx.lineJoin="round";
update_view();
}
function connect_onclick()
{
if(ws == null)
{
var ws_host_addr = "<?echo _SERVER("HTTP_HOST")?>";
if((navigator.platform.indexOf("Win") != -1) && (ws_host_addr.charAt(0) == "["))
{
// network resource identifier to UNC path name conversion
ws_host_addr = ws_host_addr.replace(/[\[\]]/g, '');
ws_host_addr = ws_host_addr.replace(/:/g, "-");
ws_host_addr += ".ipv6-literal.net";
}
ws = new WebSocket("ws://" + ws_host_addr + "/grove_camera", "uint8.phpoc");
document.getElementById("ws_state").innerHTML = "CONNECTING";
ws.onopen = ws_onopen;
ws.onclose = ws_onclose;
ws.onmessage = ws_onmessage;
ws.binaryType = "arraybuffer";
}
else
ws.close();
}
function ws_onopen()
{
document.getElementById("ws_state").innerHTML = "<font color='blue'>CONNECTED</font>";
document.getElementById("bt_connect").innerHTML = "Disconnect";
ws.send("0:0\r\n");
}
function ws_onclose()
{
document.getElementById("ws_state").innerHTML = "<font color='gray'>CLOSED</font>";
document.getElementById("bt_connect").innerHTML = "Connect";
ws.onopen = null;
ws.onclose = null;
ws.onmessage = null;
ws = null;
}
/* Camera functions */
function ws_onmessage(e_msg)
{
e_msg = e_msg || window.event; // MessageEvent
var u8view = new Uint8Array(e_msg.data);
if(u8view[0] == 0xFF && u8view[1] == 0xD8) /* Start Of JPEG Image */
image = u8view;
else
{
var data = new Uint8Array(image.length + u8view.length);
data.set(image);
data.set(u8view, image.length);
image = data;
}
if(u8view[u8view.length - 2] == 0xFF && u8view[u8view.length - 1] == 0xD9) /* End Of JPEG Image */
document.getElementById("camera").src = "data:image/jpeg;base64,"+ arrayToBase64(image);
}
function arrayToBase64(byteArray)
{
var hexString = Array.from(byteArray, function(byte) {
return ('0' + (byte & 0xFF).toString(16)).slice(-2);
}).join('');
return btoa(String.fromCharCode.apply(null, hexString.replace(/\r|\n/g, "").replace(/([\da-fA-F]{2}) ?/g, "0x$1 ").replace(/ +$/, "").split(" ")));
}
/* Joystick functions */
function send_data()
{
console.log(joystick.x_percent + ":" + joystick.y_percent + "\r\n");
if(ws != null)
ws.send(joystick.x_percent + ":" + joystick.y_percent + "\r\n");
}
function update_view()
{
var x = joystick.x, y = joystick.y;
var canvas = document.getElementById("joystick");
var ctx = canvas.getContext("2d");
ctx.clearRect(-canvas_width/2, -canvas_height/2, canvas_width, canvas_height);
ctx.lineWidth = 3;
ctx.strokeStyle="gray";
ctx.fillStyle = "LightGray";
ctx.beginPath();
ctx.arc(0, 0, range, 0, 2 * Math.PI);
ctx.stroke();
ctx.fill();
ctx.strokeStyle="black";
ctx.fillStyle = "hsl(0, 0%, 35%)";
ctx.beginPath();
ctx.arc(0, 0, radius_base, 0, 2 * Math.PI);
ctx.stroke();
ctx.fill();
ctx.strokeStyle="red";
var lineWidth = radius_shaft;
var pre_x = pre_y = 0;
var x_end = x/5;
var y_end = y/5;
var max_count = (radius_shaft - 10)/step;
var count = 1;
while(lineWidth >= 10)
{
var cur_x = Math.round(count * x_end / max_count);
var cur_y = Math.round(count * y_end / max_count);
ctx.lineWidth = lineWidth;
ctx.beginPath();
ctx.lineTo(pre_x, pre_y);
ctx.lineTo(cur_x, cur_y);
ctx.stroke();
lineWidth -= step;
pre_x = cur_x;
pre_y = cur_y;
count++;
}
var x_start = Math.round(x / 3);
var y_start = Math.round(y / 3);
lineWidth += step;
ctx.beginPath();
ctx.lineTo(pre_x, pre_y);
ctx.lineTo(x_start, y_start);
ctx.stroke();
count = 1;
pre_x = x_start;
pre_y = y_start;
while(lineWidth < radius_shaft)
{
var cur_x = Math.round(x_start + count * (x - x_start) / max_count);
var cur_y = Math.round(y_start + count * (y - y_start) / max_count);
ctx.lineWidth = lineWidth;
ctx.beginPath();
ctx.lineTo(pre_x, pre_y);
ctx.lineTo(cur_x, cur_y);
ctx.stroke();
lineWidth += step;
pre_x = cur_x;
pre_y = cur_y;
count++;
}
var grd = ctx.createRadialGradient(x, y, 0, x, y, radius_handle);
for(var i = 85; i >= 50; i-=5)
grd.addColorStop((85 - i)/35, "hsl(0, 100%, "+ i + "%)");
ctx.fillStyle = grd;
ctx.beginPath();
ctx.arc(x, y, radius_handle, 0, 2 * Math.PI);
ctx.fill();
}
function process_event(event)
{
var pos_x, pos_y;
if(event.offsetX)
{
pos_x = event.offsetX - canvas_width/2;
pos_y = event.offsetY - canvas_height/2;
}
else if(event.layerX)
{
pos_x = event.layerX - canvas_width/2;
pos_y = event.layerY - canvas_height/2;
}
else
{
pos_x = (Math.round(event.touches[0].pageX - event.touches[0].target.offsetLeft)) - canvas_width/2;
pos_y = (Math.round(event.touches[0].pageY - event.touches[0].target.offsetTop)) - canvas_height/2;
}
var x = joystick.x, y = joystick.y;
var joystick_range = range - radius_handle;
x_percent = Math.round(pos_x * 100 / joystick_range);
y_percent = Math.round(-pos_y * 100 / joystick_range);
return {x:pos_x, y:pos_y, x_percent:x_percent, y_percent:y_percent}
}
function mouse_down()
{
if(ws == null)
return;
event.preventDefault();
var pos = process_event(event);
var delta_x = pos.x - joystick.x;
var delta_y = pos.y - joystick.y;
var dist = Math.sqrt(delta_x*delta_x + delta_y*delta_y);
if(dist > radius_handle)
return;
click_state = 1;
var radius = Math.sqrt(pos.x*pos.x + pos.y*pos.y);
if(radius <(range - radius_handle))
{
delta_x = pos.x_percent - joystick.x_percent;
delta_y = pos.y_percent - joystick.y_percent;
dist = Math.sqrt(delta_x*delta_x + delta_y*delta_y);
if(dist < 2)
return;
joystick = pos;
send_data();
update_view();
}
}
function mouse_up()
{
event.preventDefault();
click_state = 0;
}
function mouse_move()
{
if(ws == null)
return;
event.preventDefault();
if(!click_state)
return;
var pos = process_event(event);
var radius = Math.sqrt(pos.x*pos.x + pos.y*pos.y);
if(radius <(range - radius_handle))
{
var delta_x = pos.x_percent - joystick.x_percent;
var delta_y = pos.y_percent - joystick.y_percent;
dist = Math.sqrt(delta_x*delta_x + delta_y*delta_y);
if(dist < 2)
return;
joystick = pos;
send_data();
update_view();
}
}
window.onload = init;
</script>
</head>
<body>
<h1>Arduino - Grove Camera - Web</h1>
<img id="camera"><br>
<canvas id="joystick"></canvas>
<h2>
<p>
WebSocket : <span id="ws_state">null</span><br>
</p>
<button id="bt_connect" type="button" onclick="connect_onclick();">Connect</button>
</h2>
</body>
</html>





Comments
Please log in or sign up to comment.