We make this project because we want to create an efficient fan so that when we use the fan there is no need to manually set speed and on / off, or when we forget to turn off the fan we don't need to fear more electricity costs.
How it works on this fan includes:
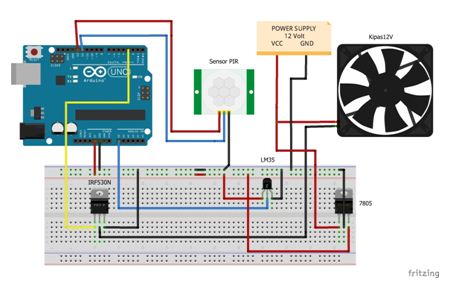
1. In here the PIR sensor as an on / off device with input detects human or human movement.
2. LM35 sensor as a fan switch with indoor temperature input, when the room temperature is getting higher then the speed of the fan is also getting higher, and vice versa.
3. We also use the IRF530N transistor because the supply voltage is 12 Volts.
#include<avr/io.h>//the time when the sensor outputs a low impulselongunsignedintlowIn;//the amount of milliseconds the sensor has to be low//before we assume all motion has stoppedlongunsignedintpause=500;booleanlockLow=true;booleantakeLowTime;constintpSuhu=A0;//inisialisasi pin to control LM35 pin A0floatsuhu,outputlm,adc;//tipe data yang memungkinkan memuat angka desimalintpirPin=12;//digital pin connected to the PIR's outputintpirPos=13;//connects to the PIR's 5V pinintkipas=3;voidsetup(){Serial.begin(9600);//begins serial communicationpinMode(pirPin,INPUT);pinMode(pirPos,OUTPUT);pinMode(kipas,OUTPUT);digitalWrite(pirPos,HIGH);pinMode(pSuhu,INPUT);// set pSuhu(LM35) to be INPUTwhile(digitalRead(pirPin)==HIGH){delay(500);Serial.print(".");}Serial.println("SENSOR ACTIVE");}voidlm35(){adc=analogRead(pSuhu);//save nilai from LM35 to variabel nilaiLM35suhu=adc/2.0479;outputlm=adc*4.883;if(suhu>=25){analogWrite(kipas,50);Serial.println("Kecepatan=50");}if(suhu>=30){analogWrite(kipas,100);Serial.println("Kecepatan=100");}if(suhu>=35){analogWrite(kipas,150);Serial.println("Kecepatan=150");}if(suhu>=40){analogWrite(kipas,200);Serial.println("Kecepatan=200");}if(suhu>=45){analogWrite(kipas,255);Serial.println("Kecepatan=255");}}voidloop(){if(digitalRead(pirPin)==HIGH){//if the PIR output is HIGH, turn servolm35();if(lockLow){//makes sure we wait for a transition to LOW before further output is madelockLow=false;Serial.println("---");Serial.print("motion detected at ");Serial.print(millis()/1000);Serial.println(" sec");delay(50);}takeLowTime=true;}if(digitalRead(pirPin)==LOW){digitalWrite(kipas,LOW);if(takeLowTime){lowIn=millis();//save the time of the transition from HIGH to LOWtakeLowTime=false;//make sure this is only done at the start of a LOW phase}//if the sensor is low for more than the given pause,//we can assume the motion has stoppedif(!lockLow&&millis()-lowIn>pause){//makes sure this block of code is only executed again after//a new motion sequence has been detectedlockLow=true;Serial.print("motion ended at ");//outputSerial.print((millis()-pause)/1000);Serial.println(" sec");delay(50);}}delay(1000);Serial.print(", Suhu: ");Serial.print(suhu);Serial.println();//send data ASCII + CR,LF (kode enter)delay(1000);Serial.print(", ADC: ");Serial.print(adc);Serial.println();//send data ASCII + CR,LF (kode enter)delay(1000);}










_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.