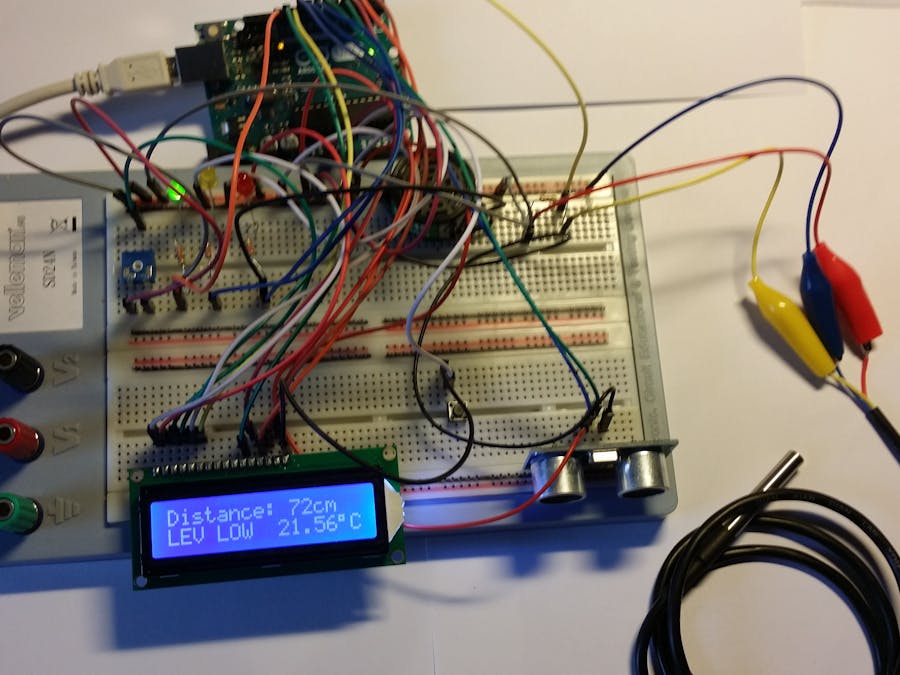
This project gives me the info I need about the waterlevel in a watertank. When the level is low, the green LED is ON. When the level is medium, the yellow LED is ON. When the level is HIGH the red LED blinks at same time with buzzer sound. The distance from sensor to waterlevel is measured by the ultrasonic sensor and is printed to the LCD together with the temperature in that tank. This project is a part of a bigger project. The second part will be 6 chasing LEDS mounted in a circle to indicate the pump is pumping. See: https://create.arduino.cc/projecthub/MichDragstar/arduino-uno-or-trinket-pro-5v-6-chasing-leds-with-pot-and-pb-23a1d7 The 3th part will start the pump when level is high and stop the pump when level is low.(under construction) For the real project I use a waterproof ultrasonic sensor, this wil not change the wiring or code. I don't know what happens about the readings when the sensor is wet (humidity), so this project is only to give me information, the 3th project is used for the pump activities and will be done by magnetic contacts.
#include <LiquidCrystal.h>
#include <OneWire.h>
#include <DallasTemperature.h>
#define ONE_WIRE_BUS 6
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature sensors(&oneWire);
LiquidCrystal LCD(12, 11, 5, 4, 3, 2);
int trigPin = 9;
int echoPin = 7;
int myCounter = 0;
float pingTime;
float targetDistance;
float speedOfSound = 776.5;
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
LCD.begin(16, 2);
LCD.setCursor(0, 0);
LCD.print("Distance:");
sensors.begin();
pinMode(8, OUTPUT);
pinMode(10, OUTPUT);
pinMode(13, OUTPUT);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2000);
digitalWrite(trigPin, HIGH);
delayMicroseconds(15);
digitalWrite(trigPin, LOW);
delayMicroseconds(10);
pingTime = pulseIn(echoPin, HIGH);
pingTime = pingTime / 1000000;
pingTime = pingTime / 3600;
targetDistance = speedOfSound * pingTime;
targetDistance = targetDistance / 2;
targetDistance = targetDistance * 160934.4;
sensors.requestTemperatures();
LCD.setCursor(10, 0);
LCD.print(" ");
LCD.setCursor(10, 0);
LCD.print((int) (targetDistance + 0.5));
LCD.print("cm ");
LCD.setCursor(0, 1);
LCD.print(" ");
LCD.setCursor(0, 1);
if (targetDistance > 40) {
LCD.print("LEV LOW ");
LCD.print(sensors.getTempCByIndex(0));
LCD.print((char)223);
LCD.print ("C");
}
else if (targetDistance < 40 && targetDistance > 20) {
LCD.print("LEV MED ");
LCD.print(sensors.getTempCByIndex(0));
LCD.print((char)223);
LCD.print ("C");
}
else (targetDistance < 20); {
LCD.print ("LEV HIGH ");
LCD.print(sensors.getTempCByIndex(0));
LCD.print((char)223);
LCD.print ("C");
}
delay(2000);
if (targetDistance > 40) {
digitalWrite (13, HIGH);
}
else {
digitalWrite(13, LOW);
}
if (targetDistance < 40 && targetDistance > 20) {
digitalWrite (8, HIGH);
}
else {
digitalWrite(8, LOW);
}
if (targetDistance < 20) {
digitalWrite(10, HIGH);
delay(2000);
digitalWrite(10, LOW);
}
else {
digitalWrite(10, LOW);
}
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
Comments
Please log in or sign up to comment.