


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
The story of this project is extremely simple. I needed a bike counter and all the projects I found either used a sensor that had to be attached to the wheel, which I don't want, or used a gps but counted the distance in a straight line
That is why my project uses gps and counts the distance along the track.
In near future I will add 3d printed case with bike mount, and maybe update Interface.
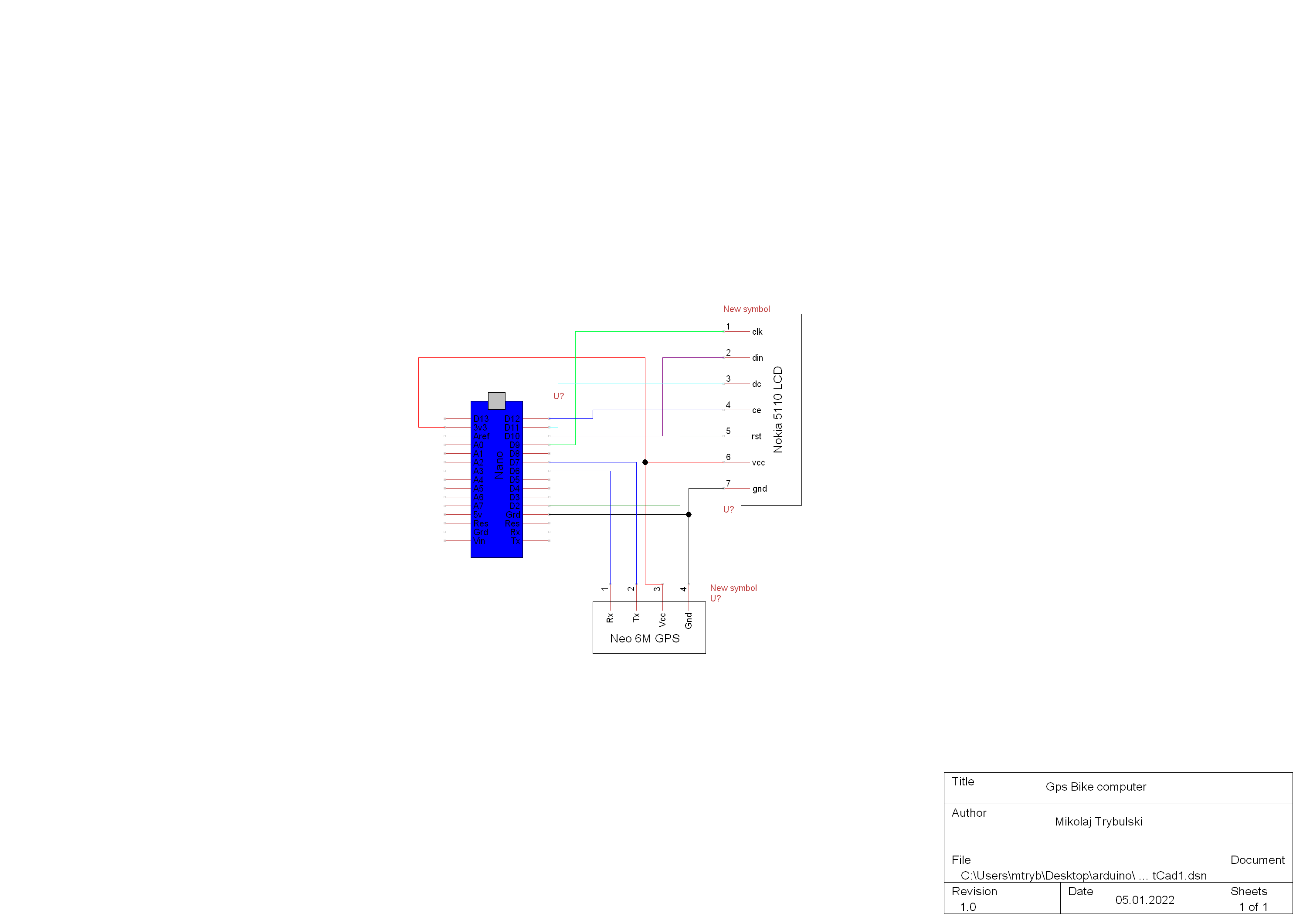
P.S. I forgot to draw on schematic that bl should be connected to D8 on Arduino









{kind=link}
Comments
Please log in or sign up to comment.