


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
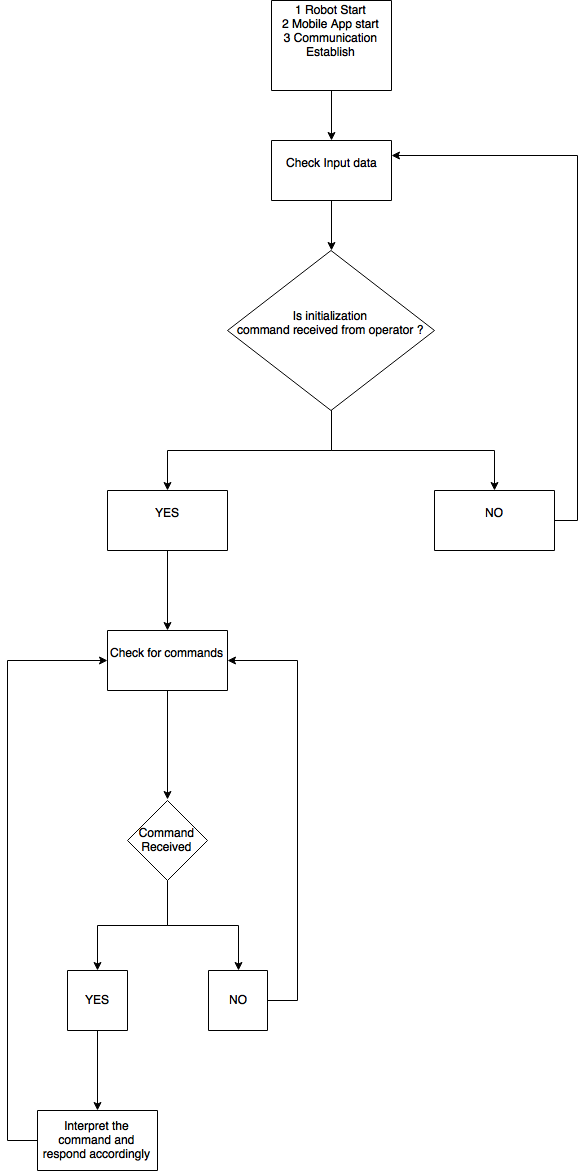
I have defined 5 basic commands:
- Forward
- Backward
- Left
- Right
- Stop
I interface the robot to my mobile app which sends the recognized speech command through Bluetooth. The Arduino will receive the commands through an xBee module and will do the action.



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments
Please log in or sign up to comment.