Nowadays a lot of cities are consider barrier-free, this give people with mobility impairments the ability to travel by themselves without being dependent on someone else.
What this project is offering is a small device to be installed within the wheelchair, and used in case of emergency to send an SOS signal to relatives. The device will have a button (Panic Button) the user can press it anytime he think that he need support, and the device will read the GPS data and send to his relatives.
The device is meant to be reliable, that's why the case is water proof, and the device battery will last longer. So the user can call for support even if his phone battery is empty.
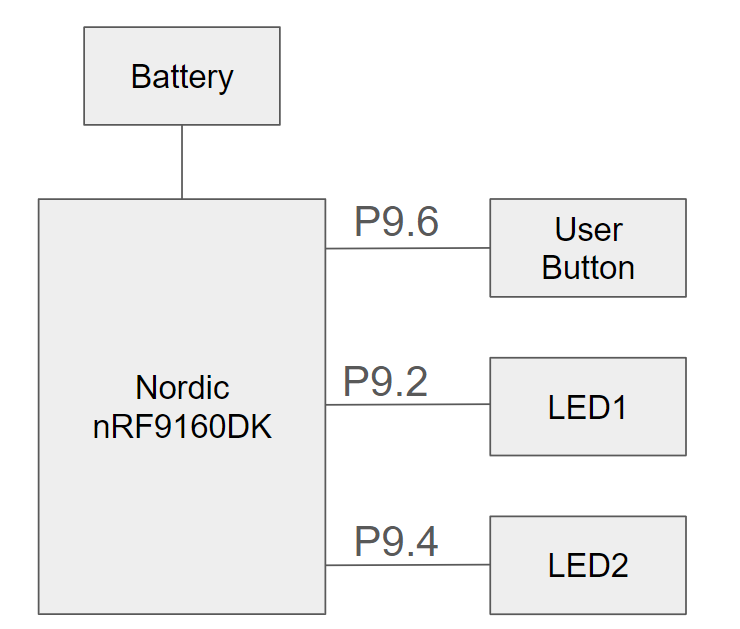
Nordic nRF9160DK is the main component of the system, with its Cellular connectivity and GNSS sensing. nRF9160DK used to read the user input (Button State) and based on this input it will get the location data using the GNSS and send these data to via SMS. The system contain LEDs that show the state of the system, The System will update LED status based on the System state. The LED1 will blink if the Modem is currently in initialization phase and will turn the LED1 ON once the Initialization is done.The LED2 will blink if the user didn't press the button to request for help (SOS Signal), and the LED2 will be turned ON when the user press the button requesting for support.
Allow the user to update the phone number to send the SMS to, and work on making the Location data more accurate.















_SPmZ63wPgQ.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.