See the project in action, as well as codes and circuit diagram:
https://you
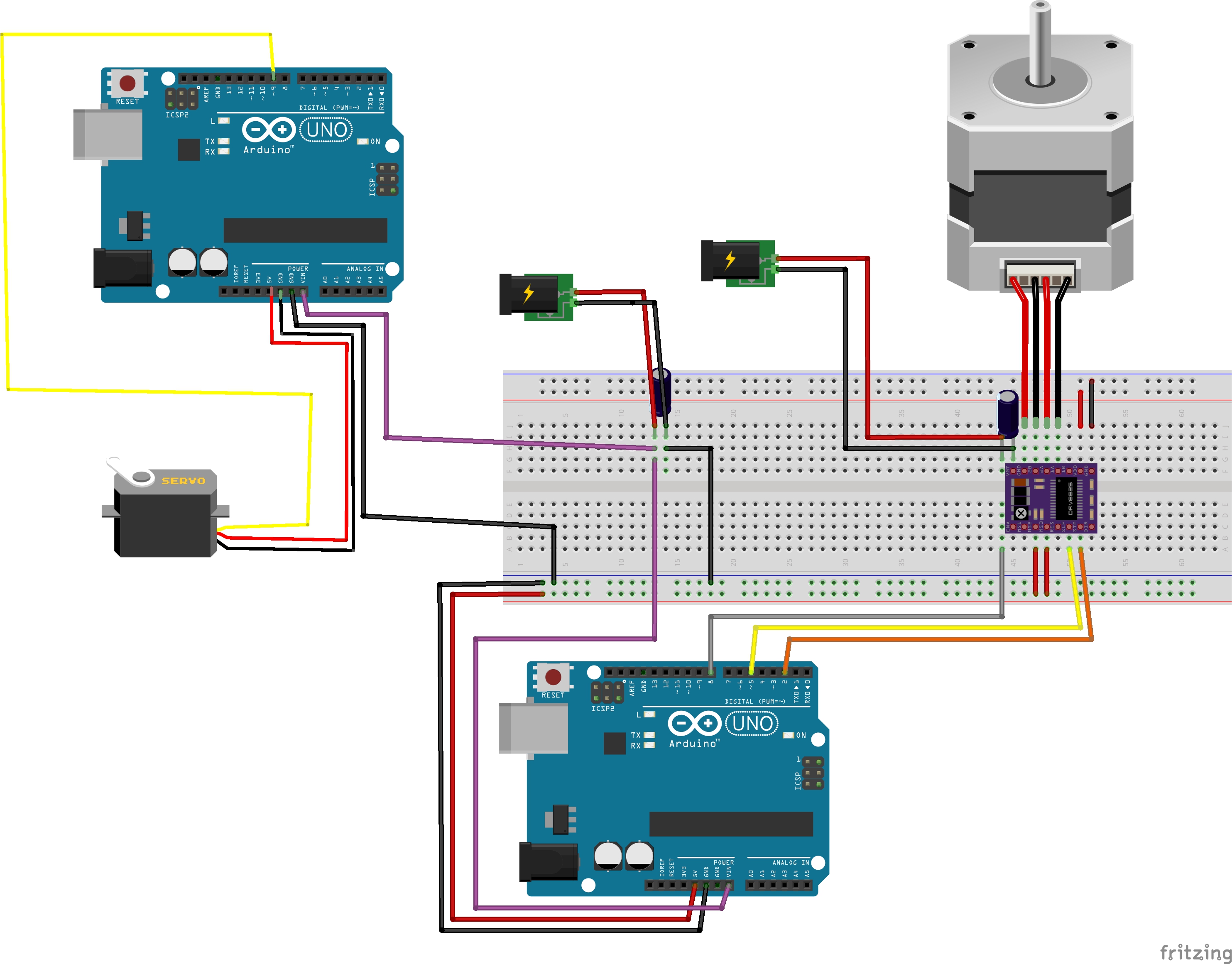
When I learned about Mr. Beast's new "Finger on the app" challenge, which is an app where you can win up to 25K $ just by touching the screen of your phone and not taking it of, I immediately started wondering if I had the skills to create a robot that could compete in the challenge. The app was not available in my country but I managed to get a bugged version of it by using a fake location, a fake phone number etc.I did not take part in the actual competition but in a bugged version and only to test my skills. I used a stepper motor that rotates a lead and moves a platform on one axis( this mechanism is often seen on 3D printers and CNC machines) and a servo that moves a stick, with a homemade aluminium foil stylus attached to it, on the other axis. Both movements are controlled by different Arduinos as the programming is easier that way and the codes are played on loop, meaning the platform goes back and forth and the stylus goes left and right. This way the whole display of the phone is touched in a matter of seconds and the circles that you need to touch that work as an anti-cheat technique are touched flawlessly. This way the robot can play continuously the game for hours and even days!




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












{kind=link}
Comments
Please log in or sign up to comment.