


Hardware components | ||||||
_copy_P5AWOdT4dX.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| |||||
 |
| |||||
iPhone X Face ID hits people with surprise, people starting to realize through AI Deep learning their face is much more unique and accurate than their fingerprint.
But what some people don't realize is the reason why iPhone X facial recognition works is that it's only detecting you or not you, therefore it is at much higher accuracy than using AI to detect multiple target.
We've built a platform that shows how the AI works on Intel Movidius NCS, using all the default camera that came with the development kit. This project can be extended to using facial recognition to unlock deadbolts, record entries, turn on different light themes, and many others.
We've trained the entire network on caffe, reaching more than 99% accuracy with "me or not me" method. Additional radar (Walabot) will be added to the project to make sure that simple images can not pass the test.
In this guide we are going to convolution neural network to create facial recognition network and secure it via Walabot to detect distance as well as user breath, then open up the deadbolt via alexa.
Alexa skillOur Alexa skill is published as Face Lock under skill id https://www.amazon.com/dp/B07C9X8SYV/ for those who are interested in taking a look
You can also follow link also alexa with a user in your system guide to setup multiple users through account linking.
https://developer.amazon.com/docs/custom-skills/link-an-alexa-user-with-a-user-in-your-system.html
Account Linking won't be needed here. To use the public Alexa skill with your own device, you can change the {YOUR_SERVER} to "https://murmuring-bayou-68628.herokuapp.com" as that's the server alexa skill is connected to for testing. For more security, you can also use your own server following this guide guide, as all the server code is being open sourced as well.
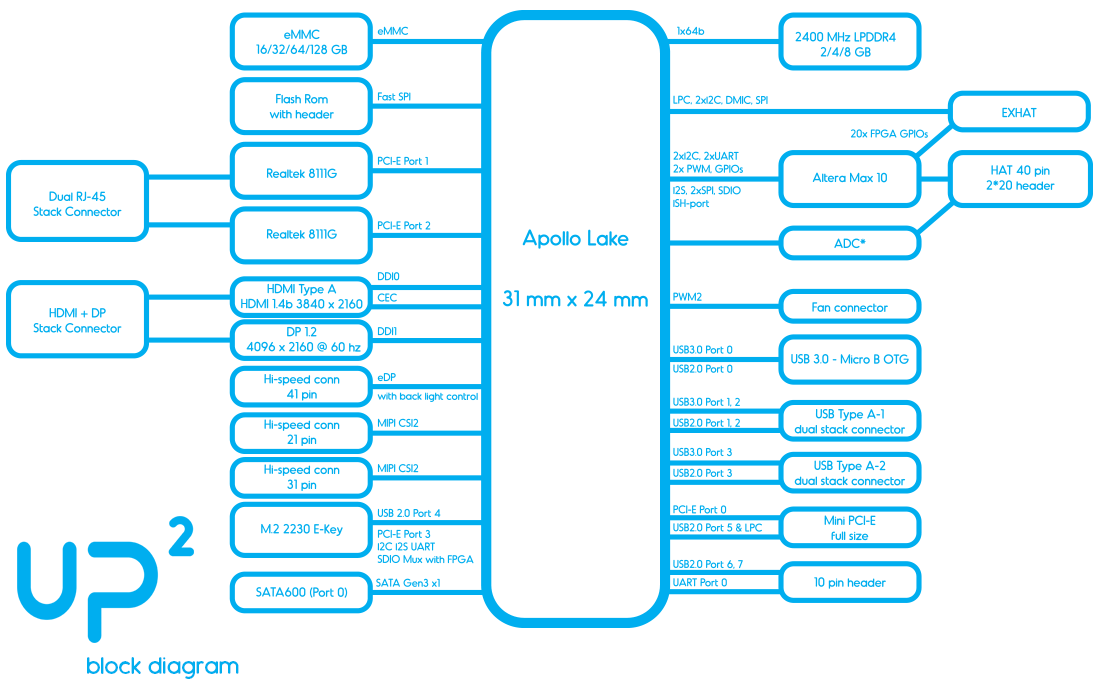
Step 1: Equipment Needed- Up2 Board powered Intel x86 (a device that runs Ubuntu)
- Movidius Neural Computing Stick
- Walabot Creator Edition
- Arduino Uno with Deadbolt lock
- Any of the Amazon Echo
- Any USB Camera
Note: There was a problem trying to install Walabot software on Nvidia Jetson as it does not support arm64 based chip. This example we are gona be using Up2 board + Movidius NCS.
There is no way around it, we'd need tens of thousands of images of your own face. You can try to get them via Google Photos or Facebook. But another easy way to train your face is simply use your computer to take videos of yourself with different emotions.
After taking maybe 5 minutes worth of selfie movies, you can use software like Total Video Converter to make them into images for training. Along the way please make the videos 640x480 so that it does not take too much space. For this guide I used about 3000 images of myself with almost 1 minute of training.
To be clear, 3000 images of myself, and 3000 images of random other objects around the environment for your test. It could be other people's faces, as well as empty spaces. So total 6,000 images is being used for this guide.
Now you have the images of yourself,.
Specific framework we use is caffe, there are many ways to train the model but we can use some of the open source ones with right parameters. For this project, I've leveraged an open source project located at https://github.com/hqli/face_recognition
So for of this to work you will need a Linux operating system with either GPU or CPU installed. We'd prefer use either AWS or Azure machines that are specifically built for machine learning. Intel Devcloud also offers free clusters for you to train.
Upload the images to the server, for start we can train 3000 of your own face image and 3000 of other people's face images. Let's put folder under face_training just so we can get a understanding of it easily.
/home/ubuntu/face_training
Use train_lmdb.py that's attached in the code, you will be able to create LMDB image database that's required for training.
We can get also get the model through following command to get the caffe model in a png view
python /opt/caffe/build/tools/draw_net.py /home/ubuntu/face_training/deepID_solver.prototxt /home/ubuntu/face_training/caffe_model_face.png
After that we need to calculate the mean image (please use your own caffe folder to launch caffe) . This is used forsubstract the mean image from each input image to ensure every feature pixel has zero mean.
/opt/caffe/build/tools/compute_image_mean -backend=lmdb /home/ubuntu/face_training/input/train_lmdb /home/ubuntu/face_training/input/mean.binaryproto
We can change the face_recognition's solver and deepID_train_test_2.prototxt, which can be seen the source code files and run following command.
/opt/caffe/build/tools/caffe train --solver /home/ubuntu/face_training/deepID_solver.prototxt 2>&1 | tee /home/ubuntu/face_training/deepID_model_train.log
After a 2000 iterations, you should have a snapshot model of your AI that can be used in your training.
Run following command to get the training curve
python plot_learning_curve.py ~/caffe_model_face/model_face_train.log ~/caffe_model_face/caffe_model_face_learning_curve.png
Up2 board is already setup with Ubuntu. But just in case you want a clean install you can follow instructions on
https://tutorials.ubuntu.com/tutorial/tutorial-install-ubuntu-desktop
Once Up2 board is set, we can login to Ubuntu and install movidius from
https://www.movidius.com/solutions/software-development-kit
This step requires we getting ready for Up2 board, from installation of NCS SDK we have caffe installed and ready to run. We'd need following files
deepID_deploy.prototxt from the source code (originally from https://github.com/hqli/face_recognition), change num_output: 2 or whichever amount of face you are using.
categories.txt create a file, making first line unknown and second line you.
Once these 3 are loaded you can download the project file https://github.com/Nyceane/ai-face-lock and change them into your own files. Run following command
Go to FaceNet folder and run mvNCCompile.pyc from bin folder
python3 ../../../bin/mvNCCompile.pyc deepID_deploy.prototxt -w snapshot_iter_300.caffemodel
This would generate you the graph file you need, simply copy over inputsize.txt and stat.txt and we can have it a go and our program will be running
python ncs_face.py
One of the biggest problem right now is that the AI can recognize your face in 2 dimension, but it does not know your face in 3 dimensional space. Walabot plays an essential role here to make sure that someone doesn't just show a picture of you and unlock the deadbolt.
We first download the deb file from http://www.walabot.com/WalabotInstaller/Latest/walabot-maker.deb
Follow instructions from http://api.walabot.com/_install.html#_linuxInstall to install Walabot API so it can be imported to python projects. There is an mistake on the website on the part where it's installing Walabot API https://api.walabot.com/_pythonapi.html#_installingwalabotapiwhere it states
python -m pip “/usr/share/walabot/python/WalabotAPI-1.0.21.tar.gz”
That should be
python3 -m pip install "/usr/share/walabot/python/WalabotAPI-1.0.21.zip"
Connect Walabot Maker via USB 2, I couldn't get the usb3 work but usb2 works fine connecting to linux. Since Joule only have one USB3 port, connect an additional USB2 port to accommodate Walabot Maker here.
Test out the Walabot project such as https://github.com/Walabot-Projects/Walabot-SensorTargets by running following command in the folder
python SensorTargets.py
This should give you a good test to see whether Walabot is running correctly, as well as how to measure distance on things you want.
The DistanceMeasure example was not too consistent on the measuring, and zPosCm seems to be extremely accurate, so I've decided to use the zPosCM for the demo. Because fake facial will not go through the same zPosCM, and on top of it we can detect breathing as well to make sure there is a human there. But for this example we are just going to try zPosCM. In this case will modify ncs_thread_model.py so that we can use Walabot Radar information along with ncs_thread AI information.
Optionally, we can use Walabot to detect whether the person is breathing or not, this way we can add additional security to the user.
When a person is breathing, we would detect energy spikes going up and down, plotted as below through Walabot Radar. Especially within close range of the radar.
When the object is fake putting in front fo the radar, it would show up on energy level. Following graph is done through putting the computer screen directly in front of the radar.
Code is being attached as "Walabot Breath Detection", you can use following code. For starters, we can detect whether the person is breathing simply by checking the data is going up and down rather than staying flat.
#!/usr/bin/env python3
from __future__ import print_function # WalabotAPI works on both Python 2 an 3.
from sys import platform
from os import system
from imp import load_source
from os.path import join
import time, random
import math
from collections import deque
import urllib.request
modulePath = join('/usr', 'share', 'walabot', 'python', 'WalabotAPI.py')
wlbt = load_source('WalabotAPI', modulePath)
wlbt.Init()
start = time.time()
class RealtimePlot:
def __init__(self, axes, max_entries =100):
self.axis_x = deque(maxlen=max_entries)
self.axis_y = deque(maxlen=max_entries)
self.axes = axes
self.max_entries = max_entries
self.lineplot, = axes.plot([], [], "ro-")
self.axes.set_autoscaley_on(True)
def add(self, x, y):
self.axis_x.append(x)
self.axis_y.append(y)
self.lineplot.set_data(self.axis_x, self.axis_y)
self.axes.set_xlim(self.axis_x[0], self.axis_x[-1] + 1e-15)
self.axes.set_ylim(0, 0.2)
self.axes.relim(); self.axes.autoscale_view() # rescale the y-axis
def animate(self, figure, callback, interval = 50):
import matplotlib.animation as animation
def wrapper(frame_index):
self.add(*callback(frame_index))
self.axes.relim(); self.axes.autoscale_view() # rescale the y-axis
return self.lineplot
animation.FuncAnimation(figure, wrapper, interval=interval)
def main():
from matplotlib import pyplot as plt
# Walabot_SetArenaR - input parameters
minInCm, maxInCm, resInCm = 30, 150, 1
# Walabot_SetArenaTheta - input parameters
minIndegrees, maxIndegrees, resIndegrees = -4, 4, 2
# Walabot_SetArenaPhi - input parameters
minPhiInDegrees, maxPhiInDegrees, resPhiInDegrees = -4, 4, 2
# Configure Walabot database install location (for windows)
wlbt.SetSettingsFolder()
# 1) Connect : Establish communication with walabot.
wlbt.ConnectAny()
# 2) Configure: Set scan profile and arena
# Set Profile - to Sensor-Narrow.
wlbt.SetProfile(wlbt.PROF_SENSOR_NARROW)
# Setup arena - specify it by Cartesian coordinates.
wlbt.SetArenaR(minInCm, maxInCm, resInCm)
# Sets polar range and resolution of arena (parameters in degrees).
wlbt.SetArenaTheta(minIndegrees, maxIndegrees, resIndegrees)
# Sets azimuth range and resolution of arena.(parameters in degrees).
wlbt.SetArenaPhi(minPhiInDegrees, maxPhiInDegrees, resPhiInDegrees)
# Dynamic-imaging filter for the specific frequencies typical of breathing
wlbt.SetDynamicImageFilter(wlbt.FILTER_TYPE_DERIVATIVE)
# 3) Start: Start the system in preparation for scanning.
wlbt.Start()
fig, axes = plt.subplots()
display = RealtimePlot(axes)
display.animate(fig, lambda frame_index: (time.time() - start, random.random() * 100))
#plt.show()
#fig, axes = plt.subplots()
#display = RealtimePlot(axes)
while True:
appStatus, calibrationProcess = wlbt.GetStatus()
# 5) Trigger: Scan(sense) according to profile and record signals
# to be available for processing and retrieval.
wlbt.Trigger()
# 6) Get action: retrieve the last completed triggered recording
energy = wlbt.GetImageEnergy()
display.add(time.time() - start, energy * 100)
#This is just for prototype purposes, we will gather the data in bulk and send them to the server in the future
plt.pause(0.001)
if __name__ == "__main__": main()
Here is the difference between machine learning and deep learning, in machine learning we can write an algorithm here to figure out what is breathing and what is not, over time improve the algorithm over time. We can also use deep learning neural network, by following step 1 to 3 and use neural computing stick to let AI figure out which one is breathing and which one is not.
Step 5C Optional: Add Energy to WalabotAs mentioned earlier, we can run deep learning algorithm on the raw image to detect energy as well following step 1 to 3.
You can use following code to obtain Raw Image, then use NCS to run a classification on the image itself. This would require a second Movidius NCS as first NCS is running facial classification.
The specific code needed in this case is, this allows the streaming of the jpg into raw.jpg
def update(self, rawImage, lenOfPhi, lenOfR):
""" Updates the canvas cells colors acorrding to a given rawImage
matrix and it's dimensions.
Arguments:
rawImage A 2D matrix contains the current rawImage slice.
lenOfPhi Number of cells in Phi axis.
lenOfR Number of cells in R axis.
"""
for i in range(lenOfPhi):
for j in range(lenOfR):
self.canvas.itemconfigure(
self.cells[lenOfPhi-i-1][j],
fill='#'+COLORS[rawImage[i][j]])
ps = self.canvas.postscripot(colormode = 'color')
im = Image.open(io.Bytes.IO(ps.encode('utf-8)))
im.save('raw.jpg')
Full code for the RawImage can be seen at
from __future__ import print_function, division
import WalabotAPI as wlbt
import io
from PIL import Image
try: # for Python 2
import Tkinter as tk
except ImportError: # for Python 3
import tkinter as tk
try: # for Python 2
range = xrange
except NameError:
pass
COLORS = [
"000083", "000087", "00008B", "00008F", "000093", "000097", "00009B",
"00009F", "0000A3", "0000A7", "0000AB", "0000AF", "0000B3", "0000B7",
"0000BB", "0000BF", "0000C3", "0000C7", "0000CB", "0000CF", "0000D3",
"0000D7", "0000DB", "0000DF", "0000E3", "0000E7", "0000EB", "0000EF",
"0000F3", "0000F7", "0000FB", "0000FF", "0003FF", "0007FF", "000BFF",
"000FFF", "0013FF", "0017FF", "001BFF", "001FFF", "0023FF", "0027FF",
"002BFF", "002FFF", "0033FF", "0037FF", "003BFF", "003FFF", "0043FF",
"0047FF", "004BFF", "004FFF", "0053FF", "0057FF", "005BFF", "005FFF",
"0063FF", "0067FF", "006BFF", "006FFF", "0073FF", "0077FF", "007BFF",
"007FFF", "0083FF", "0087FF", "008BFF", "008FFF", "0093FF", "0097FF",
"009BFF", "009FFF", "00A3FF", "00A7FF", "00ABFF", "00AFFF", "00B3FF",
"00B7FF", "00BBFF", "00BFFF", "00C3FF", "00C7FF", "00CBFF", "00CFFF",
"00D3FF", "00D7FF", "00DBFF", "00DFFF", "00E3FF", "00E7FF", "00EBFF",
"00EFFF", "00F3FF", "00F7FF", "00FBFF", "00FFFF", "03FFFB", "07FFF7",
"0BFFF3", "0FFFEF", "13FFEB", "17FFE7", "1BFFE3", "1FFFDF", "23FFDB",
"27FFD7", "2BFFD3", "2FFFCF", "33FFCB", "37FFC7", "3BFFC3", "3FFFBF",
"43FFBB", "47FFB7", "4BFFB3", "4FFFAF", "53FFAB", "57FFA7", "5BFFA3",
"5FFF9F", "63FF9B", "67FF97", "6BFF93", "6FFF8F", "73FF8B", "77FF87",
"7BFF83", "7FFF7F", "83FF7B", "87FF77", "8BFF73", "8FFF6F", "93FF6B",
"97FF67", "9BFF63", "9FFF5F", "A3FF5B", "A7FF57", "ABFF53", "AFFF4F",
"B3FF4B", "B7FF47", "BBFF43", "BFFF3F", "C3FF3B", "C7FF37", "CBFF33",
"CFFF2F", "D3FF2B", "D7FF27", "DBFF23", "DFFF1F", "E3FF1B", "E7FF17",
"EBFF13", "EFFF0F", "F3FF0B", "F7FF07", "FBFF03", "FFFF00", "FFFB00",
"FFF700", "FFF300", "FFEF00", "FFEB00", "FFE700", "FFE300", "FFDF00",
"FFDB00", "FFD700", "FFD300", "FFCF00", "FFCB00", "FFC700", "FFC300",
"FFBF00", "FFBB00", "FFB700", "FFB300", "FFAF00", "FFAB00", "FFA700",
"FFA300", "FF9F00", "FF9B00", "FF9700", "FF9300", "FF8F00", "FF8B00",
"FF8700", "FF8300", "FF7F00", "FF7B00", "FF7700", "FF7300", "FF6F00",
"FF6B00", "FF6700", "FF6300", "FF5F00", "FF5B00", "FF5700", "FF5300",
"FF4F00", "FF4B00", "FF4700", "FF4300", "FF3F00", "FF3B00", "FF3700",
"FF3300", "FF2F00", "FF2B00", "FF2700", "FF2300", "FF1F00", "FF1B00",
"FF1700", "FF1300", "FF0F00", "FF0B00", "FF0700", "FF0300", "FF0000",
"FB0000", "F70000", "F30000", "EF0000", "EB0000", "E70000", "E30000",
"DF0000", "DB0000", "D70000", "D30000", "CF0000", "CB0000", "C70000",
"C30000", "BF0000", "BB0000", "B70000", "B30000", "AF0000", "AB0000",
"A70000", "A30000", "9F0000", "9B0000", "970000", "930000", "8F0000",
"8B0000", "870000", "830000", "7F0000"]
APP_X, APP_Y = 50, 50 # location of top-left corner of window
CANVAS_LENGTH = 650 # in pixels
class RawImageApp(tk.Frame):
""" Main app class.
"""
def __init__(self, master):
""" Init the GUI components and the Walabot API.
"""
tk.Frame.__init__(self, master)
self.canvasPanel = CanvasPanel(self)
self.wlbtPanel = WalabotPanel(self)
self.ctrlPanel = ControlPanel(self)
self.canvasPanel.pack(side=tk.RIGHT, anchor=tk.NE)
self.wlbtPanel.pack(side=tk.TOP, anchor=tk.W, fill=tk.BOTH, pady=10)
self.ctrlPanel.pack(side=tk.TOP, anchor=tk.W, fill=tk.BOTH, pady=10)
self.wlbt = Walabot()
def initAppLoop(self):
if self.wlbt.isConnected():
self.ctrlPanel.statusVar.set('STATUS_CONNECTED')
self.update_idletasks()
params = self.wlbtPanel.getParams()
self.wlbt.setParams(*params)
self.wlbtPanel.setParams(*self.wlbt.getArenaParams())
if not params[4]: # equals: if not mtiMode
self.ctrlPanel.statusVar.set('STATUS_CALIBRATING')
self.update_idletasks()
self.wlbt.calibrate()
self.lenOfPhi, self.lenOfR = self.wlbt.getRawImageSliceDimensions()
self.canvasPanel.setGrid(self.lenOfPhi, self.lenOfR)
self.wlbtPanel.changeEntriesState('disabled')
self.loop()
else:
self.ctrlPanel.statusVar.set('STATUS_DISCONNECTED')
def loop(self):
self.ctrlPanel.statusVar.set('STATUS_SCANNING')
rawImage = self.wlbt.triggerAndGetRawImageSlice()
self.canvasPanel.update(rawImage, self.lenOfPhi, self.lenOfR)
self.ctrlPanel.fpsVar.set(self.wlbt.getFps())
self.cyclesId = self.after_idle(self.loop)
class WalabotPanel(tk.LabelFrame):
class WalabotParameter(tk.Frame):
""" The frame that sets each Walabot parameter line.
"""
def __init__(self, master, varVal, minVal, maxVal, defaultVal):
""" Init the Labels (parameter name, min/max value) and entry.
"""
tk.Frame.__init__(self, master)
tk.Label(self, text=varVal).pack(side=tk.LEFT, padx=(0, 5), pady=1)
self.minVal, self.maxVal = minVal, maxVal
self.var = tk.StringVar()
self.var.set(defaultVal)
self.entry = tk.Entry(self, width=7, textvariable=self.var)
self.entry.pack(side=tk.LEFT)
self.var.trace("w", lambda a, b, c, var=self.var: self.validate())
txt = "[{}, {}]".format(minVal, maxVal)
tk.Label(self, text=txt).pack(side=tk.LEFT, padx=(5, 20), pady=1)
def validate(self):
""" Checks that the entered value is a valid number and between
the min/max values. Change the font color of the value to red
if False, else to black (normal).
"""
num = self.var.get()
try:
num = float(num)
if num < self.minVal or num > self.maxVal:
self.entry.config(fg='#'+COLORS[235])
return
self.entry.config(fg='gray1')
except ValueError:
self.entry.config(fg='#'+COLORS[235])
return
def get(self):
""" Returns the entry value as a float.
"""
return float(self.var.get())
def set(self, value):
""" Sets the entry value according to a given one.
"""
self.var.set(value)
def changeState(self, state):
""" Change the entry state according to a given one.
"""
self.entry.configure(state=state)
class WalabotParameterMTI(tk.Frame):
""" The frame that control the Walabot MTI parameter line.
"""
def __init__(self, master):
""" Init the MTI line (label, radiobuttons).
"""
tk.Frame.__init__(self, master)
tk.Label(self, text="MTI ").pack(side=tk.LEFT)
self.mtiVar = tk.IntVar()
self.mtiVar.set(0)
self.true = tk.Radiobutton(
self, text="True", variable=self.mtiVar, value=2)
self.false = tk.Radiobutton(
self, text="False", variable=self.mtiVar, value=0)
self.true.pack(side=tk.LEFT)
self.false.pack(side=tk.LEFT)
def get(self):
""" Returns the value of the pressed radiobutton.
"""
return self.mtiVar.get()
def set(self, value):
""" Sets the pressed radiobutton according to a given value.
"""
self.mtiVar.set(value)
def changeState(self, state):
""" Change the state of the radiobuttons according to a given one.
"""
self.true.configure(state=state)
self.false.configure(state=state)
def __init__(self, master):
tk.LabelFrame.__init__(self, master, text='Walabot Configuration')
self.rMin = self.WalabotParameter(self, 'R Min', 1, 1000, 10.0)
self.rMax = self.WalabotParameter(self, 'R Max', 1, 1000, 100.0)
self.rRes = self.WalabotParameter(self, 'R Res', 0.1, 10, 2.0)
self.tMin = self.WalabotParameter(self, 'Theta Min', -90, 90, -20.0)
self.tMax = self.WalabotParameter(self, 'Theta Max', -90, 90, 20.0)
self.tRes = self.WalabotParameter(self, 'Theta Res', 0.1, 10, 10.0)
self.pMin = self.WalabotParameter(self, 'Phi Min', -90, 90, -45.0)
self.pMax = self.WalabotParameter(self, 'Phi Max', -90, 90, 45.0)
self.pRes = self.WalabotParameter(self, 'Phi Res', 0.1, 10, 2.0)
self.thld = self.WalabotParameter(self, 'Threshold', 0.1, 100, 15.0)
self.mti = self.WalabotParameterMTI(self)
self.parameters = (
self.rMin, self.rMax, self.rRes, self.tMin, self.tMax, self.tRes,
self.pMin, self.pMax, self.pRes, self.thld, self.mti)
for param in self.parameters:
param.pack(anchor=tk.W)
def getParams(self):
rParams = (self.rMin.get(), self.rMax.get(), self.rRes.get())
tParams = (self.tMin.get(), self.tMax.get(), self.tRes.get())
pParams = (self.pMin.get(), self.pMax.get(), self.pRes.get())
thldParam, mtiParam = self.thld.get(), self.mti.get()
return rParams, tParams, pParams, thldParam, mtiParam
def setParams(self, rParams, thetaParams, phiParams, threshold):
self.rMin.set(rParams[0])
self.rMax.set(rParams[1])
self.rRes.set(rParams[2])
self.tMin.set(thetaParams[0])
self.tMax.set(thetaParams[1])
self.tRes.set(thetaParams[2])
self.pMin.set(phiParams[0])
self.pMax.set(phiParams[1])
self.pRes.set(phiParams[2])
self.thld.set(threshold)
def changeEntriesState(self, state):
for param in self.parameters:
param.changeState(state)
class ControlPanel(tk.LabelFrame):
""" This class is designed to control the control area of the app.
"""
def __init__(self, master):
""" Initialize the buttons and the data labels.
"""
tk.LabelFrame.__init__(self, master, text='Control Panel')
self.buttonsFrame = tk.Frame(self)
self.runButton, self.stopButton = self.setButtons(self.buttonsFrame)
self.statusFrame = tk.Frame(self)
self.statusVar = self.setVar(self.statusFrame, 'APP_STATUS', '')
self.errorFrame = tk.Frame(self)
self.errorVar = self.setVar(self.errorFrame, 'EXCEPTION', '')
self.fpsFrame = tk.Frame(self)
self.fpsVar = self.setVar(self.fpsFrame, 'FRAME_RATE', 'N/A')
self.buttonsFrame.grid(row=0, column=0, sticky=tk.W)
self.statusFrame.grid(row=1, columnspan=2, sticky=tk.W)
self.errorFrame.grid(row=2, columnspan=2, sticky=tk.W)
self.fpsFrame.grid(row=3, columnspan=2, sticky=tk.W)
def setButtons(self, frame):
""" Initialize the 'Start' and 'Stop' buttons.
"""
runButton = tk.Button(frame, text='Start', command=self.start)
stopButton = tk.Button(frame, text='Stop', command=self.stop)
runButton.grid(row=0, column=0)
stopButton.grid(row=0, column=1)
return runButton, stopButton
def setVar(self, frame, varText, default):
""" Initialize the data frames.
"""
strVar = tk.StringVar()
strVar.set(default)
tk.Label(frame, text=(varText).ljust(12)).grid(row=0, column=0)
tk.Label(frame, textvariable=strVar).grid(row=0, column=1)
return strVar
def start(self):
""" Applied when 'Start' button is pressed. Starts the Walabot and
the app cycles.
"""
self.master.initAppLoop()
def stop(self):
""" Applied when 'Stop' button in pressed. Stops the Walabot and the
app cycles.
"""
if hasattr(self.master, 'cyclesId'):
self.master.after_cancel(self.master.cyclesId)
self.master.wlbtPanel.changeEntriesState('normal')
self.master.canvasPanel.reset()
self.statusVar.set('STATUS_IDLE')
class CanvasPanel(tk.LabelFrame):
""" This class is designed to control the canvas area of the app.
"""
def __init__(self, master):
""" Initialize the label-frame and canvas.
"""
tk.LabelFrame.__init__(self, master, text='Raw Image Slice: R / Phi')
self.canvas = tk.Canvas(
self, width=CANVAS_LENGTH, height=CANVAS_LENGTH)
self.canvas.pack()
self.canvas.configure(background='#'+COLORS[0])
def setGrid(self, sizeX, sizeY):
""" Set the canvas components (rectangles), given the size of the axes.
Arguments:
sizeX Number of cells in Phi axis.
sizeY Number of cells in R axis.
"""
recHeight, recWidth = CANVAS_LENGTH/sizeX, CANVAS_LENGTH/sizeY
self.cells = [[
self.canvas.create_rectangle(
recWidth*col, recHeight*row,
recWidth*(col+1), recHeight*(row+1),
width=0)
for col in range(sizeY)] for row in range(sizeX)]
def update(self, rawImage, lenOfPhi, lenOfR):
""" Updates the canvas cells colors acorrding to a given rawImage
matrix and it's dimensions.
Arguments:
rawImage A 2D matrix contains the current rawImage slice.
lenOfPhi Number of cells in Phi axis.
lenOfR Number of cells in R axis.
"""
for i in range(lenOfPhi):
for j in range(lenOfR):
self.canvas.itemconfigure(
self.cells[lenOfPhi-i-1][j],
fill='#'+COLORS[rawImage[i][j]])
ps = self.canvas.postscripot(colormode = 'color')
im = Image.open(io.Bytes.IO(ps.encode('utf-8)))
im.save('raw.jpg')
def reset(self):
""" Deletes all the canvas components (colored rectangles).
"""
self.canvas.delete('all')
class Walabot:
""" Control the Walabot using the Walabot API.
"""
def __init__(self):
""" Init the Walabot API.
"""
self.wlbt = wlbt
self.wlbt.Init()
self.wlbt.SetSettingsFolder()
def isConnected(self):
""" Try to connect the Walabot device. Return True/False accordingly.
"""
try:
self.wlbt.ConnectAny()
except self.wlbt.WalabotError as err:
if err.code == 19: # "WALABOT_INSTRUMENT_NOT_FOUND"
return False
else:
raise err
return True
def setParams(self, r, theta, phi, threshold, mti):
""" Set the arena Parameters according given ones.
"""
self.wlbt.SetProfile(self.wlbt.PROF_SENSOR)
self.wlbt.SetArenaR(*r)
self.wlbt.SetArenaTheta(*theta)
self.wlbt.SetArenaPhi(*phi)
self.wlbt.SetThreshold(threshold)
self.wlbt.SetDynamicImageFilter(mti)
self.wlbt.Start()
def getArenaParams(self):
""" Returns the Walabot parameters from the Walabot SDK.
Returns:
params rParams, thetaParams, phiParams, threshold as
given from the Walabot SDK.
"""
rParams = self.wlbt.GetArenaR()
thetaParams = self.wlbt.GetArenaTheta()
phiParams = self.wlbt.GetArenaPhi()
threshold = self.wlbt.GetThreshold()
return rParams, thetaParams, phiParams, threshold
def calibrate(self):
""" Calibrates the Walabot.
"""
self.wlbt.StartCalibration()
while self.wlbt.GetStatus()[0] == self.wlbt.STATUS_CALIBRATING:
self.wlbt.Trigger()
def getRawImageSliceDimensions(self):
""" Returns the dimensions of the rawImage 2D list given from the
Walabot SDK.
Returns:
lenOfPhi Num of cells in Phi axis.
lenOfR Num of cells in Theta axis.
"""
return self.wlbt.GetRawImageSlice()[1:3]
def triggerAndGetRawImageSlice(self):
""" Returns the rawImage given from the Walabot SDK.
Returns:
rawImage A rawImage list as described in the Walabot docs.
"""
self.wlbt.Trigger()
return self.wlbt.GetRawImageSlice()[0]
def getFps(self):
""" Returns the Walabot current fps as given from the Walabot SDK.
Returns:
fpsVar Number of frames per seconds.
"""
return int(self.wlbt.GetAdvancedParameter('FrameRate'))
def rawImage():
""" Main app function. Init the main app class, configure the window
and start the mainloop.
"""
root = tk.Tk()
root.title('Walabot - Raw Image Slice Example')
RawImageApp(root).pack(side=tk.TOP, fill=tk.BOTH, expand=True)
root.geometry("+{}+{}".format(APP_X, APP_Y)) # set window location
root.update()
root.minsize(width=root.winfo_reqwidth(), height=root.winfo_reqheight())
root.mainloop()
if __name__ == '__main__':
rawImage()
Once caffe model is built, you can use following code to get the raw image and save to raw.jpg. After that use following code to run NCS to classify the image
import os
import sys
import numpy
import ntpath
import argparse
import skimage.io
import skimage.transform
import mvnc.mvncapi as mvnc
# Number of top prodictions to print
NUM_PREDICTIONS = 5
# Variable to store commandline arguments
ARGS = None
# ---- Step 1: Open the enumerated device and get a handle to it -------------
def open_ncs_device():
# Look for enumerated NCS device(s); quit program if none found.
devices = mvnc.EnumerateDevices()
if len( devices ) == 0:
print( "No devices found" )
quit()
# Get a handle to the first enumerated device and open it
device = mvnc.Device( devices[0] )
device.OpenDevice()
return device
# ---- Step 2: Load a graph file onto the NCS device -------------------------
def load_graph( device ):
# Read the graph file into a buffer
with open( ARGS.graph, mode='rb' ) as f:
blob = f.read()
# Load the graph buffer into the NCS
graph = device.AllocateGraph( blob )
return graph
# ---- Step 3: Pre-process the images ----------------------------------------
def pre_process_image():
# Read & resize image [Image size is defined during training]
img = skimage.io.imread( ARGS.image )
img = skimage.transform.resize( img, ARGS.dim, preserve_range=True )
# Convert RGB to BGR [skimage reads image in RGB, but Caffe uses BGR]
if( ARGS.colormode == "BGR" ):
img = img[:, :, ::-1]
# Mean subtraction & scaling [A common technique used to center the data]
img = img.astype( numpy.float16 )
img = ( img - numpy.float16( ARGS.mean ) ) * ARGS.scale
return img
# ---- Step 4: Read & print inference results from the NCS -------------------
def infer_image( graph, img ):
# Load the labels file
labels =[ line.rstrip('\n') for line in
open( ARGS.labels ) if line != 'classes\n']
# The first inference takes an additional ~20ms due to memory
# initializations, so we make a 'dummy forward pass'.
graph.LoadTensor( img, 'user object' )
output, userobj = graph.GetResult()
# Load the image as a half-precision floating point array
graph.LoadTensor( img, 'user object' )
# Get the results from NCS
output, userobj = graph.GetResult()
# Sort the indices of top predictions
order = output.argsort()[::-1][:NUM_PREDICTIONS]
# Get execution time
inference_time = graph.GetGraphOption( mvnc.GraphOption.TIME_TAKEN )
# Print the results
print( "\n==============================================================" )
print( "Top predictions for", ntpath.basename( ARGS.image ) )
print( "Execution time: " + str( numpy.sum( inference_time ) ) + "ms" )
print( "--------------------------------------------------------------" )
for i in range( 0, NUM_PREDICTIONS ):
print( "%3.1f%%\t" % (100.0 * output[ order[i] ] )
+ labels[ order[i] ] )
print( "==============================================================" )
# If a display is available, show the image on which inference was performed
if 'DISPLAY' in os.environ:
skimage.io.imshow( ARGS.image )
skimage.io.show()
# ---- Step 5: Unload the graph and close the device -------------------------
def close_ncs_device( device, graph ):
graph.DeallocateGraph()
device.CloseDevice()
# ---- Main function (entry point for this script ) --------------------------
def main():
device = open_ncs_device()
graph = load_graph( device )
img = pre_process_image()
infer_image( graph, img )
close_ncs_device( device, graph )
# ---- Define 'main' function as the entry point for this script -------------
if __name__ == '__main__':
parser = argparse.ArgumentParser(
description="Image classifier using \
Intel® Movidius™ Neural Compute Stick." )
parser.add_argument( '-g', '--graph', type=str,
default='/WalabotRawNet/graph',
help="Absolute path to the neural network graph file." )
parser.add_argument( '-i', '--image', type=str,
default='raw.jpg',
help="Absolute path to the image that needs to be inferred." )
parser.add_argument( '-l', '--labels', type=str,
default='raw_classifies.txt',
help="Absolute path to labels file." )
parser.add_argument( '-M', '--mean', type=float,
nargs='+',
default=[104.00698793, 116.66876762, 122.67891434],
help="',' delimited floating point values for image mean." )
parser.add_argument( '-S', '--scale', type=float,
default=1,
help="Absolute path to labels file." )
parser.add_argument( '-D', '--dim', type=int,
nargs='+',
default=[224, 224],
help="Image dimensions. ex. -D 224 224" )
parser.add_argument( '-c', '--colormode', type=str,
default="BGR",
help="RGB vs BGR color sequence. TensorFlow = RGB, Caffe = BGR" )
ARGS = parser.parse_args()
main()
# ==== End of file ===========================================================
The last part of hardware setup is the deadbolt itself, and we'd have to use mraa library to set it up. We first put Grove Shield on Up2 board, as picture shows, then install mraa library by
sudo add-apt-repository ppa:mraa/mraa
sudo apt-get update
sudo apt-get install libmraa1 libmraa-dev libmraa-java python-mraa python3-mraa node-mraa mraa-tools
We can then run examples from https://github.com/intel-iot-devkit/mraa
Ideally, we would be able to run this directly from the Up2 board, but because currently GPIO is not pushing enough ampage outside, we can make an extra step adding the lock to arduino and control it via mraa.
The code is rather simple on the Arduino side, simply receiving 0 to lock, receiving 1 to unlock. This is sending through USB (UART) channel, making it simple to use.
const int ledPin = 7; // the number of the LED pin
int incomingByte = 0; // for incoming serial data
void setup() {
// initialize the LED pin as an output:
pinMode(ledPin, OUTPUT);
Serial.begin(9600); // opens serial port, sets data rate to 9600 bps
}
void loop() {
// send data only when you receive data:
if (Serial.available() > 0) {
// read the incoming byte:
incomingByte = Serial.read();
if(incomingByte == 48)
{
digitalWrite(ledPin, LOW);
}
else if(incomingByte == 49)
{
digitalWrite(ledPin, HIGH);
}
// say what you got:
Serial.print("I received: ");
Serial.println(incomingByte, DEC);
}
}
We can test the deadbolt using follow code on Up2 board
import mraa
import time
import sys
mraa.addSubplatform(mraa.GROVEPI,"0")
# serial port
port = "/dev/ttyACM0"
data_on = "1"
data_off = "0"
# initialise UART
uart = mraa.Uart(port)
while True:
uart.write(bytearray(data_on, 'utf-8'))
print("on")
time.sleep(3)
uart.write(bytearray(data_off, 'utf-8'))
print("off")
time.sleep(3)
Finally, we can integrate all of this part into our main app.
Step 7: Server data storageIn order to track face and walabot sensor data, it's a good idea that we we store the data in the cloud. In this example, we are setting up a simple file storage in a file, but in the future we can store that into mongodb.
Current example is a very simple form of Proof of Concept, we are only tracking facial recognition, walabot distance and walabot breathing, all in boolean form. When the alexa realize all those are true, it will flag the alexa for unlock. While updating the server data, we will get the alexa flag back to whether unlock the deadbolt or not.
For this example we will be using node.js and host through heroku. We used https://murmuring-bayou-68628.herokuapp.com if you want to test your own alexa
We can follow through the guide to setup your server: https://devcenter.heroku.com/articles/getting-started-with-nodejs#introduction
Once server is setup, use the following code attached as your base. You can choose to host on other places such as Amazon, Azure, or IBM Bluemix; this is just a quick example to spin up the server and getting it running.
We are saving files based on UserId so that it can be separated, in the future we can build a database for it.
const express = require('express')
const path = require('path')
const PORT = process.env.PORT || 5000
var fs = require('fs');
var PubNub = require('pubnub')
var app = express()
var http = require("http");
setInterval(function() {
http.get("{your own url}/test");
}, 300000);
// respond with "hello world" when a GET request is made to the homepage
app.get('/', function (req, res) {
fs.readFile('data.txt', 'utf8', function readFileCallback(err, data){
if (err){
console.log(err);
} else {
obj = JSON.parse(data); //now it an object
res.send(JSON.stringify(obj));
}});
})
app.get('/test', function (req, res) {
/*
fs.readFile('data.txt', 'utf8', function readFileCallback(err, data){
if (err){
console.log(err);
} else {
obj = JSON.parse(data); //now it an object
res.send(JSON.stringify(obj));
}});*/
res.send("200");
})
app.get('/input', function (req, res)
{ var fs = require('fs');
var faceid = req.query.faceid;
var distance = req.query.distance;
var breathing = req.query.breathing;
fs.readFile('data.txt', 'utf8', function readFileCallback(err, data){
if (err){
console.log(err);
} else {
obj = JSON.parse(data); //now it an object
obj.faceid = parseInt(faceid);
obj.distance = parseInt(distance); //add some data
obj.breathing = parseInt(breathing); //add some data
json = JSON.stringify(obj); //convert it back to json
fs.writeFile('data.txt', json, 'utf8', null); // write it back
fs.readFile('alexa.txt', 'utf8', function readFileCallback(err, data){
if (err){
console.log(err);
} else {
obj = JSON.parse(data); //now it an object
json = JSON.stringify(obj); //convert it back to json
res.send(json)
}});
}});
})
app.get('/alexa', function (req, res)
{ var fs = require('fs');
var alexa = 1;
fs.readFile('alexa.txt', 'utf8', function readFileCallback(err, data){
if (err){
console.log(err);
} else {
obj = JSON.parse(data); //now it an object
obj.alexa = 1;
json = JSON.stringify(obj); //convert it back to json
fs.writeFile('alexa.txt', json, 'utf8', null); // write it back
setTimeout(function() {
//Reset back to lock mode after 10 seconds, enough for client side to unlock
var obj = new Object()
obj.alexa = 0;
json = JSON.stringify(obj); //convert it back to json
fs.writeFile('alexa.txt', json, 'utf8', null); // write it back
}, 10000);
res.send('success')
}});
})
app.listen(PORT, () => console.log(`Listening on ${ PORT }`))
Let Walabot update the sever once it reaches the threshold.
if
distance = 1
else distance = 0
Users can now use Alexa to unlock the deadbolt. We will use the Alexa Quick Skill kit through following this guide: https://developer.amazon.com/alexa-skills-kit/alexa-skill-quick-start-tutorial
The guide will teach you:
- Create Lambda function on AWS
- Create Alexa Skill on Alexa skill
Lambda hosts a serverless function which Alexa can interact with. Create one empty one using node.js instead of following the guide. We can copy/paste the Alexa node.js code from below.
After creating the function, we would have the ARN number. Write it down so we can use that in configuration for the Alexa Skill kit. We would also have to add the Alexa Skill kit into the AI Face Lock - copy and paste the entire node.js code, the code is attached as LAMBDA code, you can change {YOUR_SERVER} to https://murmuring-bayou-68628.herokuapp.com as a default server that we use.
The intelligence right now is hosted in Alexa and it checks for moving around vs. moving a lot, such as getting up. This way we can take the off loads from the server.
Now we are moving to the Alexa Skill kit:
In the Interaction model, put the following Lock Intent schema there:
Intent Schema:
{
"intents": [
{
"intent": "AILockIntent"
},
{
"intent": "AMAZON.HelpIntent"
}
]
}
Sample Utterances:
AILockIntent Unlock the bolt
AILockIntent Open the bolt
After that, in configuration, we can put the ARN that we used earlier:
Now you can test your Alexa skill by asking "Alexa, ask Face Lock to unlock the bolt". Or use any Amazon echo to test it out
You are officially done, now the AI can detect 3 scenarios, when it's not you, when you are using a photo or fake yourself, and when it is you.
Step 11: Android portionThis is an extra step to make android work, we will make a simple Pubnub app that connects to android when we receive alarms when someone else is activating the app so that user can stream into their webcam. We use opentok to do simple webcam intergration
Here is the android code for receiving notification as well as opening lock
import android.app.Notification;
import android.app.NotificationChannel;
import android.app.NotificationManager;
import android.app.PendingIntent;
import android.content.Context;
import android.content.Intent;
import android.graphics.Color;
import android.media.RingtoneManager;
import android.opengl.GLSurfaceView;
import android.os.Build;
import android.support.v4.app.NotificationCompat;
import android.support.v4.app.TaskStackBuilder;
import android.support.v7.app.AppCompatActivity;
import android.support.annotation.NonNull;
import android.Manifest;
import android.os.Bundle;
import android.util.Log;
import android.widget.FrameLayout;
import android.app.AlertDialog;
import android.content.DialogInterface;
import android.widget.Toast;
import com.opentok.android.Session;
import com.opentok.android.Stream;
import com.opentok.android.Publisher;
import com.opentok.android.PublisherKit;
import com.opentok.android.Subscriber;
import com.opentok.android.BaseVideoRenderer;
import com.opentok.android.OpentokError;
import com.opentok.android.SubscriberKit;
import com.pubnub.api.PNConfiguration;
import com.pubnub.api.PubNub;
import com.pubnub.api.callbacks.PNCallback;
import com.pubnub.api.callbacks.SubscribeCallback;
import com.pubnub.api.enums.PNStatusCategory;
import com.pubnub.api.models.consumer.PNPublishResult;
import com.pubnub.api.models.consumer.PNStatus;
import com.pubnub.api.models.consumer.pubsub.PNMessageResult;
import com.pubnub.api.models.consumer.pubsub.PNPresenceEventResult;
import com.tokbox.android.tutorials.basicvideochat.R;
import java.util.Arrays;
import java.util.List;
import pub.devrel.easypermissions.AfterPermissionGranted;
import pub.devrel.easypermissions.AppSettingsDialog;
import pub.devrel.easypermissions.EasyPermissions;
public class MainActivity extends AppCompatActivity
implements EasyPermissions.PermissionCallbacks,
WebServiceCoordinator.Listener,
Session.SessionListener,
PublisherKit.PublisherListener,
SubscriberKit.SubscriberListener{
private static final String LOG_TAG = MainActivity.class.getSimpleName();
private static final int RC_SETTINGS_SCREEN_PERM = 123;
private static final int RC_VIDEO_APP_PERM = 124;
// Suppressing this warning. mWebServiceCoordinator will get GarbageCollected if it is local.
@SuppressWarnings("FieldCanBeLocal")
private WebServiceCoordinator mWebServiceCoordinator;
private Session mSession;
private Publisher mPublisher;
private Subscriber mSubscriber;
private FrameLayout mPublisherViewContainer;
private FrameLayout mSubscriberViewContainer;
@Override
protected void onCreate(Bundle savedInstanceState) {
Log.d(LOG_TAG, "onCreate");
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
// initialize view objects from your layout
mPublisherViewContainer = (FrameLayout)findViewById(R.id.publisher_container);
mSubscriberViewContainer = (FrameLayout)findViewById(R.id.subscriber_container);
requestPermissions();
PNConfiguration pnConfiguration = new PNConfiguration();
pnConfiguration.setSubscribeKey("sub-c-777d4466-c823-11e6-b045-02ee2ddab7fe");
pnConfiguration.setPublishKey("pub-c-99f0375f-cc13-46fb-9b30-d1772c531f3a");
PubNub pubnub = new PubNub(pnConfiguration);
pubnub.addListener(new SubscribeCallback() {
@Override
public void status(PubNub pubnub, PNStatus status) {
if (status.getCategory() == PNStatusCategory.PNUnexpectedDisconnectCategory) {
// This event happens when radio / connectivity is lost
}
else if (status.getCategory() == PNStatusCategory.PNConnectedCategory) {
// Connect event. You can do stuff like publish, and know you'll get it.
// Or just use the connected event to confirm you are subscribed for
// UI / internal notifications, etc
/*
if (status.getCategory() == PNStatusCategory.PNConnectedCategory){
pubnub.publish().channel("awesomeChannel").message("hello!!").async(new PNCallback<PNPublishResult>() {
@Override
public void onResponse(PNPublishResult result, PNStatus status) {
// Check whether request successfully completed or not.
if (!status.isError()) {
// Message successfully published to specified channel.
}
// Request processing failed.
else {
// Handle message publish error. Check 'category' property to find out possible issue
// because of which request did fail.
//
// Request can be resent using: [status retry];
}
}
});
}*/
}
else if (status.getCategory() == PNStatusCategory.PNReconnectedCategory) {
// Happens as part of our regular operation. This event happens when
// radio / connectivity is lost, then regained.
}
else if (status.getCategory() == PNStatusCategory.PNDecryptionErrorCategory) {
// Handle messsage decryption error. Probably client configured to
// encrypt messages and on live data feed it received plain text.
}
}
@Override
public void message(PubNub pubnub, PNMessageResult message) {
// Handle new message stored in message.message
if (message.getChannel() != null) {
// Message has been received on channel group stored in
// message.getChannel()
Log.e("doh", "Doh");
NotificationManager mNotificationManager =
(NotificationManager) getSystemService(Context.NOTIFICATION_SERVICE);
if (Build.VERSION.SDK_INT >= Build.VERSION_CODES.O) {
NotificationChannel notificationChannel = new NotificationChannel("facelock", "My Notifications", NotificationManager.IMPORTANCE_DEFAULT);
// Configure the notification channel.
notificationChannel.setDescription("Channel description");
notificationChannel.enableLights(true);
notificationChannel.setLightColor(Color.RED);
notificationChannel.setVibrationPattern(new long[]{0, 1000, 500, 1000});
notificationChannel.enableVibration(true);
mNotificationManager.createNotificationChannel(notificationChannel);
}
Notification.Builder mBuilder =
new Notification.Builder(MainActivity.this, "facelock")
.setSmallIcon(R.mipmap.ic_launcher_small)
.setContentTitle("Face lock")
.setContentText("Face lock is detecting unusual activity, click to see security cam.");
Intent notificationIntent = new Intent(MainActivity.this, MainActivity.class);
notificationIntent.setFlags(Intent.FLAG_ACTIVITY_CLEAR_TOP
| Intent.FLAG_ACTIVITY_SINGLE_TOP);
PendingIntent intent = PendingIntent.getActivity(MainActivity.this, 0,
notificationIntent, 0);
mBuilder.setContentIntent(intent);
mNotificationManager.notify(001, mBuilder.build());
// Intent intent = new Intent(MainActivity.this, MainActivity.class);
// MainActivity.this.startActivity(intent);
}
else {
// Message has been received on channel stored in
// message.getSubscription()
}
/*
log the following items with your favorite logger
- message.getMessage()
- message.getSubscription()
- message.getTimetoken()
*/
}
@Override
public void presence(PubNub pubnub, PNPresenceEventResult presence) {
}
});
pubnub.subscribe().channels(Arrays.asList("facelock")).execute();
}
/* Activity lifecycle methods */
@Override
protected void onPause() {
Log.d(LOG_TAG, "onPause");
super.onPause();
if (mSession != null) {
mSession.onPause();
}
}
@Override
protected void onResume() {
Log.d(LOG_TAG, "onResume");
super.onResume();
if (mSession != null) {
mSession.onResume();
}
}
@Override
public void onRequestPermissionsResult(int requestCode, @NonNull String[] permissions, @NonNull int[] grantResults) {
super.onRequestPermissionsResult(requestCode, permissions, grantResults);
EasyPermissions.onRequestPermissionsResult(requestCode, permissions, grantResults, this);
}
@Override
public void onPermissionsGranted(int requestCode, List<String> perms) {
Log.d(LOG_TAG, "onPermissionsGranted:" + requestCode + ":" + perms.size());
}
@Override
public void onPermissionsDenied(int requestCode, List<String> perms) {
Log.d(LOG_TAG, "onPermissionsDenied:" + requestCode + ":" + perms.size());
if (EasyPermissions.somePermissionPermanentlyDenied(this, perms)) {
new AppSettingsDialog.Builder(this)
.setTitle(getString(R.string.title_settings_dialog))
.setRationale(getString(R.string.rationale_ask_again))
.setPositiveButton(getString(R.string.setting))
.setNegativeButton(getString(R.string.cancel))
.setRequestCode(RC_SETTINGS_SCREEN_PERM)
.build()
.show();
}
}
@AfterPermissionGranted(RC_VIDEO_APP_PERM)
private void requestPermissions() {
String[] perms = { Manifest.permission.INTERNET, Manifest.permission.CAMERA, Manifest.permission.RECORD_AUDIO };
if (EasyPermissions.hasPermissions(this, perms)) {
// if there is no server URL set
if (OpenTokConfig.CHAT_SERVER_URL == null) {
// use hard coded session values
if (OpenTokConfig.areHardCodedConfigsValid()) {
initializeSession(OpenTokConfig.API_KEY, OpenTokConfig.SESSION_ID, OpenTokConfig.TOKEN);
} else {
showConfigError("Configuration Error", OpenTokConfig.hardCodedConfigErrorMessage);
}
} else {
// otherwise initialize WebServiceCoordinator and kick off request for session data
// session initialization occurs once data is returned, in onSessionConnectionDataReady
if (OpenTokConfig.isWebServerConfigUrlValid()) {
mWebServiceCoordinator = new WebServiceCoordinator(this, this);
mWebServiceCoordinator.fetchSessionConnectionData(OpenTokConfig.SESSION_INFO_ENDPOINT);
} else {
showConfigError("Configuration Error", OpenTokConfig.webServerConfigErrorMessage);
}
}
} else {
EasyPermissions.requestPermissions(this, getString(R.string.rationale_video_app), RC_VIDEO_APP_PERM, perms);
}
}
private void initializeSession(String apiKey, String sessionId, String token) {
mSession = new Session.Builder(this, apiKey, sessionId).build();
mSession.setSessionListener(this);
mSession.connect(token);
}
/* Web Service Coordinator delegate methods */
@Override
public void onSessionConnectionDataReady(String apiKey, String sessionId, String token) {
Log.d(LOG_TAG, "ApiKey: "+apiKey + " SessionId: "+ sessionId + " Token: "+token);
initializeSession(apiKey, sessionId, token);
}
@Override
public void onWebServiceCoordinatorError(Exception error) {
Log.e(LOG_TAG, "Web Service error: " + error.getMessage());
Toast.makeText(this, "Web Service error: " + error.getMessage(), Toast.LENGTH_LONG).show();
finish();
}
/* Session Listener methods */
@Override
public void onConnected(Session session) {
Log.d(LOG_TAG, "onConnected: Connected to session: "+session.getSessionId());
// initialize Publisher and set this object to listen to Publisher events
mPublisher = new Publisher.Builder(this).build();
mPublisher.setPublisherListener(this);
// set publisher video style to fill view
mPublisher.getRenderer().setStyle(BaseVideoRenderer.STYLE_VIDEO_SCALE,
BaseVideoRenderer.STYLE_VIDEO_FILL);
mPublisherViewContainer.addView(mPublisher.getView());
if (mPublisher.getView() instanceof GLSurfaceView) {
((GLSurfaceView) mPublisher.getView()).setZOrderOnTop(true);
}
mSession.publish(mPublisher);
}
@Override
public void onDisconnected(Session session) {
Log.d(LOG_TAG, "onDisconnected: Disconnected from session: "+session.getSessionId());
}
@Override
public void onStreamReceived(Session session, Stream stream) {
Log.d(LOG_TAG, "onStreamReceived: New Stream Received "+stream.getStreamId() + " in session: "+session.getSessionId());
if (mSubscriber == null) {
mSubscriber = new Subscriber.Builder(this, stream).build();
mSubscriber.getRenderer().setStyle(BaseVideoRenderer.STYLE_VIDEO_SCALE, BaseVideoRenderer.STYLE_VIDEO_FILL);
mSubscriber.setSubscriberListener(this);
mSession.subscribe(mSubscriber);
mSubscriberViewContainer.addView(mSubscriber.getView());
}
}
@Override
public void onStreamDropped(Session session, Stream stream) {
Log.d(LOG_TAG, "onStreamDropped: Stream Dropped: "+stream.getStreamId() +" in session: "+session.getSessionId());
if (mSubscriber != null) {
mSubscriber = null;
mSubscriberViewContainer.removeAllViews();
}
}
@Override
public void onError(Session session, OpentokError opentokError) {
Log.e(LOG_TAG, "onError: "+ opentokError.getErrorDomain() + " : " +
opentokError.getErrorCode() + " - "+opentokError.getMessage() + " in session: "+ session.getSessionId());
showOpenTokError(opentokError);
}
/* Publisher Listener methods */
@Override
public void onStreamCreated(PublisherKit publisherKit, Stream stream) {
Log.d(LOG_TAG, "onStreamCreated: Publisher Stream Created. Own stream "+stream.getStreamId());
}
@Override
public void onStreamDestroyed(PublisherKit publisherKit, Stream stream) {
Log.d(LOG_TAG, "onStreamDestroyed: Publisher Stream Destroyed. Own stream "+stream.getStreamId());
}
@Override
public void onError(PublisherKit publisherKit, OpentokError opentokError) {
Log.e(LOG_TAG, "onError: "+opentokError.getErrorDomain() + " : " +
opentokError.getErrorCode() + " - "+opentokError.getMessage());
showOpenTokError(opentokError);
}
@Override
public void onConnected(SubscriberKit subscriberKit) {
Log.d(LOG_TAG, "onConnected: Subscriber connected. Stream: "+subscriberKit.getStream().getStreamId());
}
@Override
public void onDisconnected(SubscriberKit subscriberKit) {
Log.d(LOG_TAG, "onDisconnected: Subscriber disconnected. Stream: "+subscriberKit.getStream().getStreamId());
}
@Override
public void onError(SubscriberKit subscriberKit, OpentokError opentokError) {
Log.e(LOG_TAG, "onError: "+opentokError.getErrorDomain() + " : " +
opentokError.getErrorCode() + " - "+opentokError.getMessage());
showOpenTokError(opentokError);
}
private void showOpenTokError(OpentokError opentokError) {
Toast.makeText(this, opentokError.getErrorDomain().name() +": " +opentokError.getMessage() + " Please, see the logcat.", Toast.LENGTH_LONG).show();
finish();
}
private void showConfigError(String alertTitle, final String errorMessage) {
Log.e(LOG_TAG, "Error " + alertTitle + ": " + errorMessage);
new AlertDialog.Builder(this)
.setTitle(alertTitle)
.setMessage(errorMessage)
.setPositiveButton("ok", new DialogInterface.OnClickListener() {
public void onClick(DialogInterface dialog, int which) {
MainActivity.this.finish();
}
})
.setIcon(android.R.drawable.ic_dialog_alert)
.show();
}
}
Server side is quiet easy, we just need to update our lambda code
'use strict';
var http = require('https');
var PubNub = require('pubnub')
exports.handler = function (event, context) {
try {
console.log("event.session.application.applicationId=" + event.session.application.applicationId);
/**
* Uncomment this if statement and populate with your skill's application ID to
* prevent someone else from configuring a skill that sends requests to this function.
*/
if (event.session.application.applicationId !== "amzn1.ask.skill.645f001e-5ea6-49b3-90ef-a0d9c0ef25a1") {
context.fail("Invalid Application ID");
}
if (event.session.new) {
onSessionStarted({requestId: event.request.requestId}, event.session);
}
if (event.session.user.accessToken == undefined) {
var cardTitle = "Welcome to AI Face Lock"
var speechOutput = "Your axcount is not linked, to start using this skill, please use the companion app to authenticate on Amazon"
buildSpeechletResponse(cardTitle, speechOutput, "", true);
}
if (event.request.type === "LaunchRequest") {
onLaunch(event.request,
event.session,
function callback(sessionAttributes, speechletResponse) {
context.succeed(buildResponse(sessionAttributes, speechletResponse));
});
} else if (event.request.type === "IntentRequest") {
onIntent(event.request,
event.session,
function callback(sessionAttributes, speechletResponse) {
context.succeed(buildResponse(sessionAttributes, speechletResponse));
});
} else if (event.request.type === "SessionEndedRequest") {
onSessionEnded(event.request, event.session);
context.succeed();
}
} catch (e) {
context.fail("Exception: " + e);
}
};
/**
* Called when the session starts.
*/
function onSessionStarted(sessionStartedRequest, session) {
console.log("onSessionStarted requestId=" + sessionStartedRequest.requestId
+ ", sessionId=" + session.sessionId);
// add any session init logic here
}
/**
* Called when the user invokes the skill without specifying what they want.
*/
function onLaunch(launchRequest, session, callback) {
console.log("onLaunch requestId=" + launchRequest.requestId
+ ", sessionId=" + session.sessionId);
var cardTitle = "Welcome to AI Face Lock"
var speechOutput = "Welcome to AI Face Lock"
callback(session.attributes,
buildSpeechletResponse(cardTitle, speechOutput, "", false));
}
/**
* Called when the user specifies an intent for this skill.
*/
function onIntent(intentRequest, session, callback) {
console.log("onIntent requestId=" + intentRequest.requestId
+ ", sessionId=" + session.sessionId);
var intent = intentRequest.intent,
intentName = intentRequest.intent.name;
// dispatch custom intents to handlers here
if (intentName == 'AILockIntent') {
handleTrackRequest(intent, session, callback);
}
else if(intentName == 'AMAZON.HelpIntent')
{
callback(session.attributes, buildSpeechletResponseWithoutCard("Please follow hackter.io guide and build out the Face Lock and unlock your bolt, afterwards, just ask face lock to unlock the deadbolt", "", false));
//buildSpeechletResponseWithoutCard("Please follow hackter.io guide and build out the Face Lock and unlock your bolt", "", false);
}
else if (intentName =='AMAZON.CancelIntent' || intentName == 'AMAZON.StopIntent')
{
callback(session.attributes, buildSpeechletResponseWithoutCard("Exiting AI Face Lock", "", true));
//buildSpeechletResponseWithoutCard("Exiting AI Face Lock", "", false);
}
else {
throw "Invalid intent";
}
}
/**
* Called when the user ends the session.
* Is not called when the skill returns shouldEndSession=true.
*/
function onSessionEnded(sessionEndedRequest, session) {
console.log("onSessionEnded requestId=" + sessionEndedRequest.requestId
+ ", sessionId=" + session.sessionId);
// Add any cleanup logic here
}
function handleTrackRequest(intent, session, callback) {
var url = "https://murmuring-bayou-68628.herokuapp.com/"; //you can use your own
http.get(url, function(res){
res.setEncoding('utf8');
res.on('data', function (chunk) {
console.log('BODY: ' + chunk);
var chunk = JSON.parse(chunk);
var pubnub = new PubNub({
publishKey : '{your own key}',
subscribeKey : '{your own key}'
})
var publishConfig = {
channel : "facelock",
message : {
title: "Face lock",
description: "Face lock is detecting unusual activity, click to see security cam."
}
};
if(parseInt(chunk.faceid) == 0)
{
callback(session.attributes, buildSpeechletResponseWithoutCard("Face lock doesn't recognize any user around", "", "true"));
pubnub.publish(publishConfig, function(status, response) {
console.log(status, response);
});
}
else if (parseInt(chunk.distance) == 0 || parseInt(chunk.breahting) == 0)
{
callback(session.attributes, buildSpeechletResponseWithoutCard("Walabot is not detecting people's presence", "", "true"));
pubnub.publish(publishConfig, function(status, response) {
console.log(status, response);
});
}
else
{
var urlalexa = "https://murmuring-bayou-68628.herokuapp.com/alexafalse"; //you can use your own
http.get(urlalexa, function(res1){
res1.setEncoding('utf8');
res1.on('data', function (chunk1) {
console.log('BODY: ' + chunk1);
})})
callback(session.attributes, buildSpeechletResponseWithoutCard("Unlocking deadbolt...", "", "true"));
}
})
}).on('error', function (e) {
callback(session.attributes, buildSpeechletResponseWithoutCard("There was a problem Connecting to your AI Lock", "", "true"));
})
//callback(session.attributes, buildSpeechletResponseWithoutCard("test", "", "true"));
//callback(session.attributes, buildSpeechletResponseWithoutCard("Face lock doesn't see you around", "", "true"));
}
// ------- Helper functions to build responses -------
function buildSpeechletResponse(title, output, repromptText, shouldEndSession) {
return {
outputSpeech: {
type: "PlainText",
text: output
},
card: {
type: "Simple",
title: title,
content: output
},
reprompt: {
outputSpeech: {
type: "PlainText",
text: repromptText
}
},
shouldEndSession: shouldEndSession
};
}
function buildSpeechletResponseWithoutCard(output, repromptText, shouldEndSession) {
return {
outputSpeech: {
type: "PlainText",
text: output
},
reprompt: {
outputSpeech: {
type: "PlainText",
text: repromptText
}
},
shouldEndSession: shouldEndSession
};
}
function buildResponse(sessionAttributes, speechletResponse) {
return {
version: "1.0",
sessionAttributes: sessionAttributes,
response: speechletResponse
};
}
On the IoT side inject tokbox code on a web page it should work as follows






{kind=link}
Comments
Please log in or sign up to comment.