


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
The story of Paradox-Asi, is the same as most people, I had an idea. I wanted to make a robot that was not just worn on your shoulder but your head. so I took some time, decided to use my first companion Bot as reference and got to work. The final version of this idea is actually V4 but here is a pic of the transformation.
Okay, first you're gonna need your parts. Most are printed but I also have some things I ordered from Amazon.
The first thing I wanted to do was make the body, its made out of 3 parts all together, the bottom being the Magnet Cup then the Torso lastly the shoulder plate. since these parts are very small I had to glue them, I used Glue Gloop, its pretty strong and does not leave a stain on the part. I also put the servo in the holder before gluing.
To hold it all together in one piece. The rest is kinda like Legos. While this is glueing I say print out the legs and get them set up and ready for the body.
The legs are made out of multiple pieces. the move legs three parts the un moving ones two.
If the glue ha dried you can attach these to the body, with one of the pulleys.
It should look something like the photo above.This is also the perfect time to test the pully system. I attached the push and pull sticks to the servo arm this motion give the robot its spider movement.
After that the two smaller legs on the side are just for holding the robot on your head they don't move but keep the robot stable.
Currently the project should looks something like this?
Next is the Tail and Head. The head is Just a cup with a L.E.D in it, and I made a small spider shape Cup to fit as the Butt of the robot it also holds the circuit.
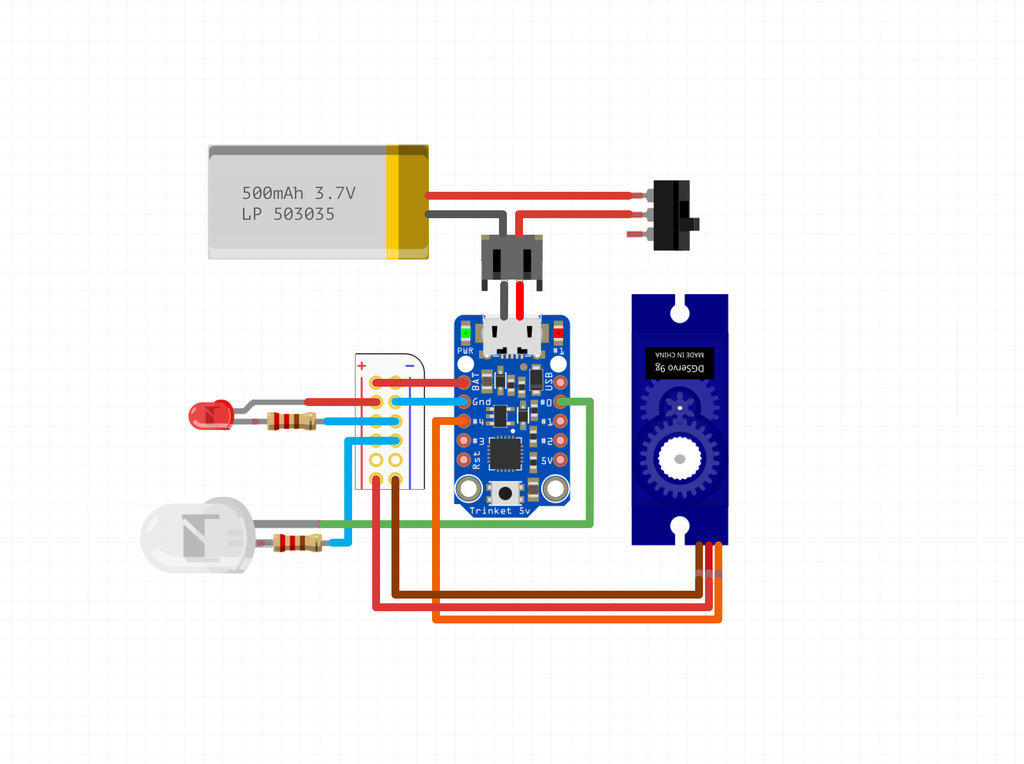
I used Adafruit circuit and code from there Zelda Guardian Project: https://learn.adafruit.com/guardian-robot-zelda-botw/circuit-diagram
After you code it and stuff the circuit into the butt of the spider, you're pretty much done, Oh almost forgot the acrylic circle that hides the servo pulley system is just a Lens from a pair of goggles! Haha! Easily purchasable from places like Amazon.
Just some extras things I ran into the tail can be heavy sometimes so you can glue it to the top cover to hold it up. I used hott glue in this instance. I do have legs that connect to the butt to help but sometimes they are not strong enough.









{kind=link}
Comments