#include <LedControl.h>
//We always have to include the LedControl library
#include "LedControl.h"
/*
Create LetControl object, define pin connections
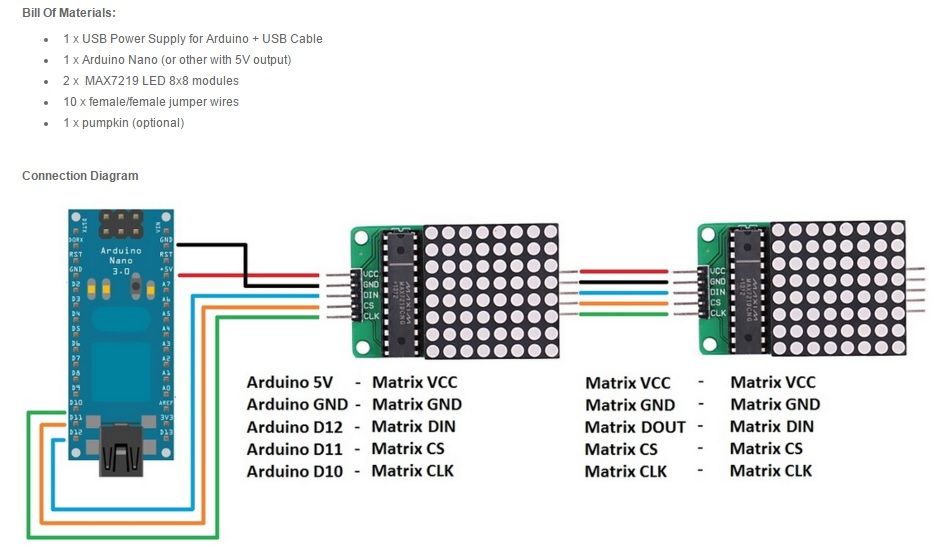
We have 2 MAX72XX for eyes.
*/
#define PIN_EYES_DIN 12
#define PIN_EYES_CS 11
#define PIN_EYES_CLK 10
LedControl lc = LedControl(PIN_EYES_DIN, PIN_EYES_CLK, PIN_EYES_CS, 2);
// rotation
bool rotateMatrix0 = false; // rotate 0 matrix by 180 deg
bool rotateMatrix1 = false; // rotate 1 matrix by 180 deg
// define eye ball without pupil
byte eyeBall[8]={
B00111100,
B01111110,
B11111111,
B11111111,
B11111111,
B11111111,
B01111110,
B00111100
};
byte eyePupil = B11100111;
// stores current state of LEDs
byte eyeCurrent[8];
int currentX;
int currentY;
int cntLoop = 0;
int cntEffect = 0;
// min and max positions
#define MIN -2
#define MAX 2
// delays
#define DELAY_BLINK 40
// perform an effect every # of loop iterations, 0 to disable
#define EFFECT_ITERATION 4
/*
Arduino setup
*/
void setup()
{
// MAX72XX is in power-saving mode on startup, we have to do a wakeup call
lc.shutdown(0,false);
lc.shutdown(1,false);
// set the brightness to low
lc.setIntensity(0,1);
lc.setIntensity(1,1);
// clear both modules
lc.clearDisplay(0);
lc.clearDisplay(1);
// LED test
// vertical line
byte b = B10000000;
for (int c=0; c<=7; c++)
{
for (int r=0; r<=7; r++)
{
setRow(0, r, b);
setRow(1, r, b);
}
b = b >> 1;
delay(50);
}
// full module
b = B11111111;
for (int r=0; r<=7; r++)
{
setRow(0, r, b);
setRow(1, r, b);
}
delay(500);
// clear both modules
lc.clearDisplay(0);
lc.clearDisplay(1);
delay(500);
// random seed
randomSeed(analogRead(0));
// center eyes, crazy blink
displayEyes(0, 0);
delay(2000);
blinkEyes(true, false);
blinkEyes(false, true);
delay(1000);
}
/*
Arduino loop
*/
void loop()
{
// move to random position, wait random time
moveEyes(random(MIN, MAX + 1), random(MIN, MAX + 1), 50);
delay(random(5, 7) * 500);
// blink time?
if (random(0, 5) == 0)
{
delay(500);
blinkEyes();
delay(500);
}
// effect time?
if (EFFECT_ITERATION > 0)
{
cntLoop++;
if (cntLoop == EFFECT_ITERATION)
{
cntLoop = 0;
if (cntEffect > 6) cntEffect = 0;
switch(cntEffect)
{
case 0: // cross eyes
crossEyes();
delay(1000);
break;
case 1: // round spin
roundSpin(2);
delay(1000);
break;
case 2: // crazy spin
crazySpin(2);
delay(1000);
break;
case 3: // meth eyes
methEyes();
delay(1000);
break;
case 4: // lazy eye
lazyEye();
delay(1000);
break;
case 5: // crazy blink
blinkEyes(true, false);
blinkEyes(false, true);
delay(1000);
break;
case 6: // glow
glowEyes(3);
delay(1000);
break;
default:
break;
}
cntEffect++;
}
}
}
/*
This method blinks both eyes
*/
void blinkEyes()
{
blinkEyes(true, true);
}
/*
This method blinks eyes as per provided params
*/
void blinkEyes(boolean blinkLeft, boolean blinkRight)
{
// blink?
if (!blinkLeft && !blinkRight)
return;
// close eyelids
for (int i=0; i<=3; i++)
{
if (blinkLeft)
{
setRow(0, i, 0);
setRow(0, 7-i, 0);
}
if (blinkRight)
{
setRow(1, i, 0);
setRow(1, 7-i, 0);
}
delay(DELAY_BLINK);
}
// open eyelids
for (int i=3; i>=0; i--)
{
if (blinkLeft)
{
setRow(0, i, eyeCurrent[i]);
setRow(0, 7-i, eyeCurrent[7-i]);
}
if (blinkRight)
{
setRow(1, i, eyeCurrent[i]);
setRow(1, 7-i, eyeCurrent[7-i]);
}
delay(DELAY_BLINK);
}
}
/*
This methods moves eyes to center position,
then moves horizontally with wrapping around edges.
*/
void crazySpin(int times)
{
if (times == 0)
return;
moveEyes(0, 0, 50);
delay(500);
byte row = eyePupil;
for (int t=0; t<times; t++)
{
// spin from center to L
for (int i=0; i<5; i++)
{
row = row >> 1;
row = row | B10000000;
setRow(0, 3, row); setRow(1, 3, row);
setRow(0, 4, row); setRow(1, 4, row);
delay(50);
if (t == 0)
delay((5-i)*10); // increase delay on 1st scroll (speed up effect)
}
// spin from R to center
for (int i=0; i<5; i++)
{
row = row >> 1;
if (i>=2)
row = row | B10000000;
setRow(0, 3, row); setRow(1, 3, row);
setRow(0, 4, row); setRow(1, 4, row);
delay(50);
if (t == (times-1))
delay((i+1)*10); // increase delay on last scroll (slow down effect)
}
}
}
/*
This method crosses eyes
*/
void crossEyes()
{
moveEyes(0, 0, 50);
delay(500);
byte pupilR = eyePupil;
byte pupilL = eyePupil;
// move pupils together
for (int i=0; i<2; i++)
{
pupilR = pupilR >> 1;
pupilR = pupilR | B10000000;
pupilL = pupilL << 1;
pupilL = pupilL | B1;
setRow(0, 3, pupilR); setRow(1, 3, pupilL);
setRow(0, 4, pupilR); setRow(1, 4, pupilL);
delay(100);
}
delay(2000);
// move pupils back to center
for (int i=0; i<2; i++)
{
pupilR = pupilR << 1;
pupilR = pupilR | B1;
pupilL = pupilL >> 1;
pupilL = pupilL | B10000000;
setRow(0, 3, pupilR); setRow(1, 3, pupilL);
setRow(0, 4, pupilR); setRow(1, 4, pupilL);
delay(100);
}
}
/*
This method displays eyeball with pupil offset by X, Y values from center position.
Valid X and Y range is [MIN,MAX]
Both LED modules will show identical eyes
*/
void displayEyes(int offsetX, int offsetY)
{
// ensure offsets are in valid ranges
offsetX = getValidValue(offsetX);
offsetY = getValidValue(offsetY);
// calculate indexes for pupil rows (perform offset Y)
int row1 = 3 - offsetY;
int row2 = 4 - offsetY;
// define pupil row
byte pupilRow = eyePupil;
// perform offset X
// bit shift and fill in new bit with 1
if (offsetX > 0) {
for (int i=1; i<=offsetX; i++)
{
pupilRow = pupilRow >> 1;
pupilRow = pupilRow | B10000000;
}
}
else if (offsetX < 0) {
for (int i=-1; i>=offsetX; i--)
{
pupilRow = pupilRow << 1;
pupilRow = pupilRow | B1;
}
}
// pupil row cannot have 1s where eyeBall has 0s
byte pupilRow1 = pupilRow & eyeBall[row1];
byte pupilRow2 = pupilRow & eyeBall[row2];
// display on LCD matrix, update to eyeCurrent
for(int r=0; r<8; r++)
{
if (r == row1)
{
setRow(0, r, pupilRow1);
setRow(1, r, pupilRow1);
eyeCurrent[r] = pupilRow1;
}
else if (r == row2)
{
setRow(0, r, pupilRow2);
setRow(1, r, pupilRow2);
eyeCurrent[r] = pupilRow2;
}
else
{
setRow(0, r, eyeBall[r]);
setRow(1, r, eyeBall[r]);
eyeCurrent[r] = eyeBall[r];
}
}
// update current X and Y
currentX = offsetX;
currentY = offsetY;
}
/*
This method corrects provided coordinate value
*/
int getValidValue(int value)
{
if (value > MAX)
return MAX;
else if (value < MIN)
return MIN;
else
return value;
}
/*
This method pulsates eye (changes LED brightness)
*/
void glowEyes(int times)
{
for (int t=0; t<times; t++)
{
for (int i=2; i<=8; i++)
{
lc.setIntensity(0,i);
lc.setIntensity(1,i);
delay(50);
}
delay(250);
for (int i=7; i>=1; i--)
{
lc.setIntensity(0,i);
lc.setIntensity(1,i);
delay(25);
}
delay(150);
}
}
/*
This method moves eyes to center, out and then back to center
*/
void methEyes()
{
moveEyes(0, 0, 50);
delay(500);
byte pupilR = eyePupil;
byte pupilL = eyePupil;
// move pupils out
for (int i=0; i<2; i++)
{
pupilR = pupilR << 1;
pupilR = pupilR | B1;
pupilL = pupilL >> 1;
pupilL = pupilL | B10000000;
setRow(0, 3, pupilR); setRow(1, 3, pupilL);
setRow(0, 4, pupilR); setRow(1, 4, pupilL);
delay(100);
}
delay(2000);
// move pupils back to center
for (int i=0; i<2; i++)
{
pupilR = pupilR >> 1;
pupilR = pupilR | B10000000;
pupilL = pupilL << 1;
pupilL = pupilL | B1;
setRow(0, 3, pupilR); setRow(1, 3, pupilL);
setRow(0, 4, pupilR); setRow(1, 4, pupilL);
delay(100);
}
}
/*
This method moves both eyes from current position to new position
*/
void moveEyes(int newX, int newY, int stepDelay)
{
// set current position as start position
int startX = currentX;
int startY = currentY;
// fix invalid new X Y values
newX = getValidValue(newX);
newY = getValidValue(newY);
// eval steps
int stepsX = abs(currentX - newX);
int stepsY = abs(currentY - newY);
// need to change at least one position
if ((stepsX == 0) && (stepsY == 0))
return;
// eval direction of movement, # of steps, change per X Y step, perform move
int dirX = (newX >= currentX) ? 1 : -1;
int dirY = (newY >= currentY) ? 1 : -1;
int steps = (stepsX > stepsY) ? stepsX : stepsY;
int intX, intY;
float changeX = (float)stepsX / (float)steps;
float changeY = (float)stepsY / (float)steps;
for (int i=1; i<=steps; i++)
{
intX = startX + round(changeX * i * dirX);
intY = startY + round(changeY * i * dirY);
displayEyes(intX, intY);
delay(stepDelay);
}
}
/*
This method lowers and raises right pupil only
*/
void lazyEye()
{
moveEyes(0, 1, 50);
delay(500);
// lower left pupil slowly
for (int i=0; i<3; i++)
{
setRow(1, i+2, eyeBall[i+2]);
setRow(1, i+3, eyeBall[i+3] & eyePupil);
setRow(1, i+4, eyeBall[i+4] & eyePupil);
delay(150);
}
delay(1000);
// raise left pupil quickly
for (int i=0; i<3; i++)
{
setRow(1, 4-i, eyeBall[4-i] & eyePupil);
setRow(1, 5-i, eyeBall[5-i] & eyePupil);
setRow(1, 6-i, eyeBall[6-i]);
delay(25);
}
}
/*
This method spins pupils clockwise
*/
void roundSpin(int times)
{
if (times == 0)
return;
moveEyes(2, 0, 50);
delay(500);
for (int i=0; i<times; i++)
{
displayEyes(2, -1); delay(40); if (i==0) delay(40);
displayEyes(1, -2); delay(40); if (i==0) delay(30);
displayEyes(0, -2); delay(40); if (i==0) delay(20);
displayEyes(-1, -2); delay(40);if (i==0) delay(10);
displayEyes(-2, -1); delay(40);
displayEyes(-2, 0); delay(40);
displayEyes(-2, 1); delay(40);if (i==(times-1)) delay(10);
displayEyes(-1, 2); delay(40);if (i==(times-1)) delay(20);
displayEyes(0, 2); delay(40); if (i==(times-1)) delay(30);
displayEyes(1, 2); delay(40); if (i==(times-1)) delay(40);
displayEyes(2, 1); delay(40); if (i==(times-1)) delay(50);
displayEyes(2, 0); delay(40);
}
}
/*
This method sets values to matrix row
Performs 180 rotation if needed
*/
void setRow(int addr, int row, byte rowValue)
{
if (((addr == 0) && (rotateMatrix0)) || (addr == 1 && rotateMatrix1))
{
row = abs(row - 7);
rowValue = bitswap(rowValue);
}
lc.setRow(addr, row, rowValue);
}
/*
Reverse bits in byte
http://www.nrtm.org/index.php/2013/07/25/reverse-bits-in-a-byte/
*/
byte bitswap (byte x)
{
byte result;
asm("mov __tmp_reg__, %[in] \n\t"
"lsl __tmp_reg__ \n\t" /* shift out high bit to carry */
"ror %[out] \n\t" /* rotate carry __tmp_reg__to low bit (eventually) */
"lsl __tmp_reg__ \n\t" /* 2 */
"ror %[out] \n\t"
"lsl __tmp_reg__ \n\t" /* 3 */
"ror %[out] \n\t"
"lsl __tmp_reg__ \n\t" /* 4 */
"ror %[out] \n\t"
"lsl __tmp_reg__ \n\t" /* 5 */
"ror %[out] \n\t"
"lsl __tmp_reg__ \n\t" /* 6 */
"ror %[out] \n\t"
"lsl __tmp_reg__ \n\t" /* 7 */
"ror %[out] \n\t"
"lsl __tmp_reg__ \n\t" /* 8 */
"ror %[out] \n\t"
: [out] "=r" (result) : [in] "r" (x));
return(result);
}

















{kind=link}
{kind=link}
Comments