



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
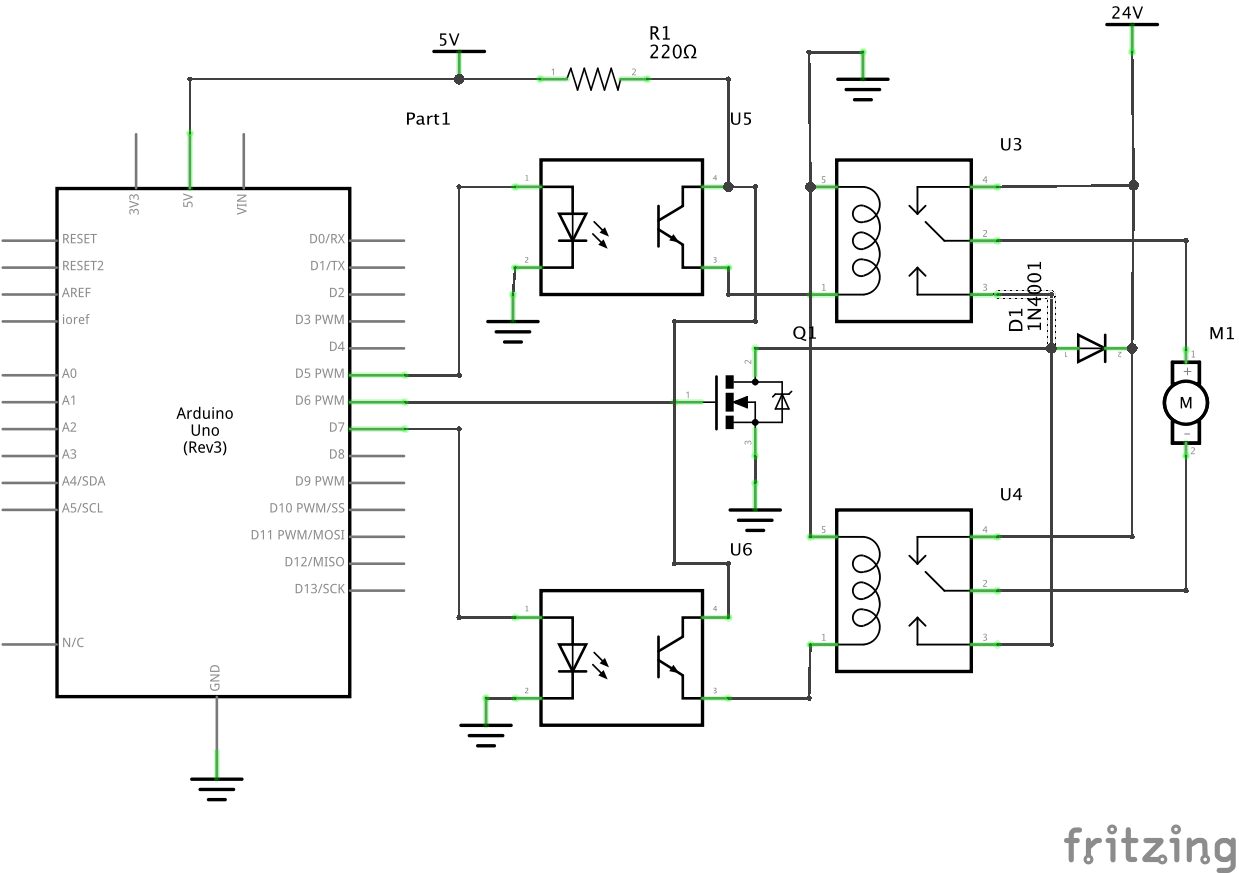
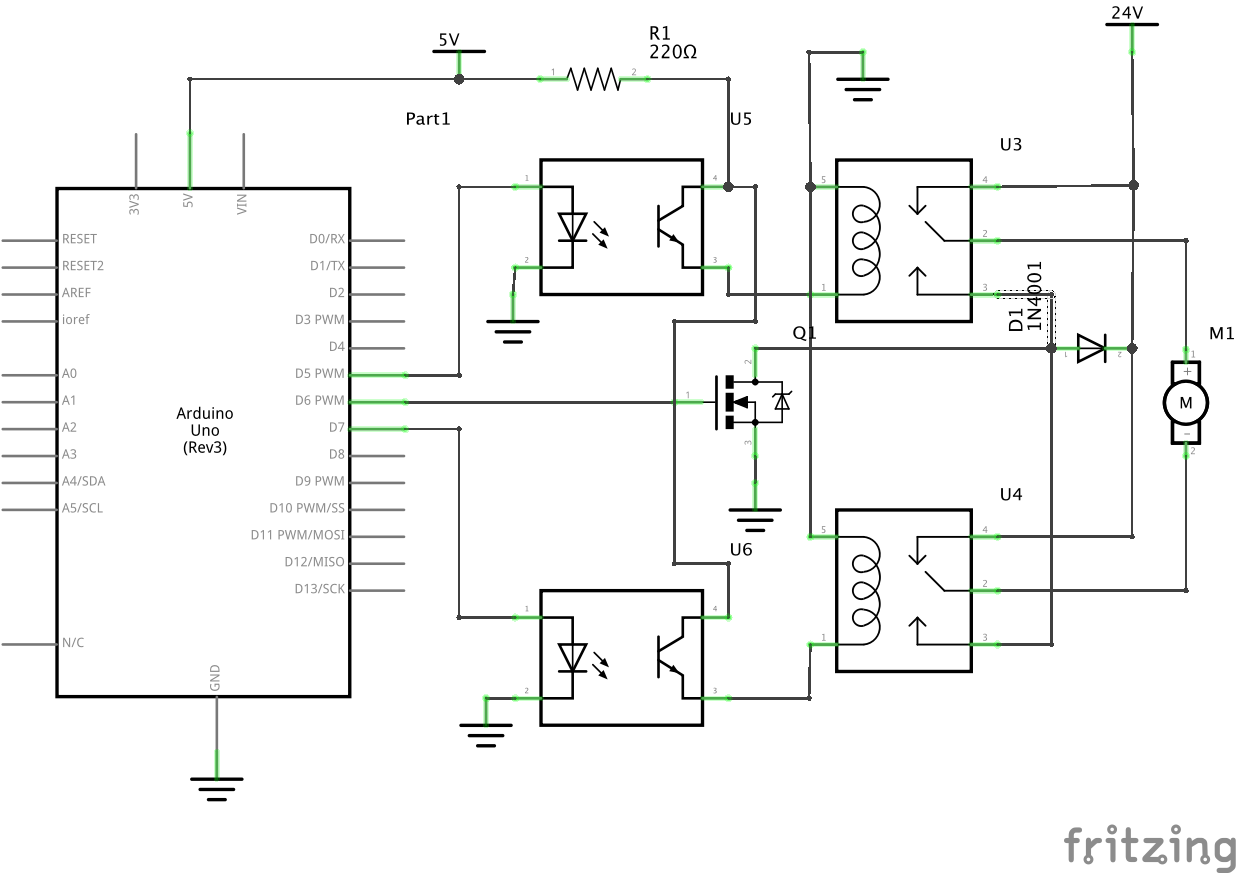
Recently, we had our garage door controller fail. Unfortunately new controller was unobtanium and buying a whole new motor would be quite costly. I decided to try and build a controller based on UNO and a few lines of code.
The build is based on Arduino UNO with low side PWM speed control and two relays for switching. The motor has high stall current (aprox. 10A) so H bridge was not an option or would be difficult to implement.
Since the remote receiver was a separate module, I was able to reverse engineer the signal output and all existing remotes work nicely.
All in all it took a week to do. It is installed now and works fine but app needs some fine tuning. The following functionalities are implemented:
1. Door opening/ closing
2. Door initialisation (detects and stores open and closed positions in eprom)
3. Obstacle detection (automatically stops if blocked for 1/10th sec)
to do:
1. Travel sensors (min & max)
2. Optical sensor (disable movement if door is blocked)
3. Automatic closing after car passed.
#include <EEPROM.h>
int pinI1=5; // PIN D5 MOTOR UP
int pinI2=7; // PIN D7 MOTOR DOWN
int speedpinA=6; // PIN D6 PWM
//const int relay_pin=4;
int pwm=150;
volatile int steps = 0; // Pulses from Hall Effect sensors
const int pinH1=2; // PIN D2 HALL sensor signal
const int remote_input = 3; // PIN D3 Remote signal
const int init_button = 4; // PIN D4 Door init button
const int LONG_PRESS_TIME = 2000;
// Variables will change:
int lastState = HIGH; // the previous state from the input pin
int currentState; // the current reading from the input pin
unsigned long pressedTime = 0;
bool isPressing = false;
bool isLongDetected = false;
int RemotebuttonState = 0;
//int InitbuttonState = 0;
int door_status = 0; //Door open/closed position 0-closed 1-open 2-interrupted
int door_position = 0;
int prev_door_pos = 0;
bool active = 0; //Active command check
int door_open_pos = 0; //Hall memory of open position
const int door_closed_pos = 0; //Closed position default
int last_dir = 0; // Last direction of movement 0-up 1-down
volatile unsigned long prevTimer = 0;
bool initialized = 0;
bool alarm = 0;
int alarm_count=0;
void setup() {
// put your setup code here, to run once:
pinMode(pinI1,OUTPUT);
pinMode(pinI2,OUTPUT);
pinMode(speedpinA,OUTPUT);
digitalWrite(pinI1,HIGH);
digitalWrite(pinI2,HIGH);
delay(2000);
// pinMode(relay_pin,OUTPUT);
Serial.begin(9600);
pinMode(remote_input,INPUT);
pinMode(init_button,INPUT_PULLUP);
pinMode(pinH1,INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(pinH1), countSteps, CHANGE); // HALL sensor interrupt init
//EEPROM.write(0, 100);
door_open_pos = EEPROM.read(0);
// door_closed_pos = EEPROM.read(1);
/* INIT SEQUENCE */
Serial.print("Door open position set: ");
Serial.println(door_open_pos);
Serial.print("Door closed position set: ");
Serial.println(door_closed_pos);
Serial.print("Door initialized: ");
Serial.println(initialized);
delay(1000);
//digitalWrite(relay_pin, HIGH);
}
void loop() {
RemotebuttonState = digitalRead(remote_input); // wait for remote signal or button press
currentState = digitalRead(init_button); // wait for remote signal or button press
if (RemotebuttonState == HIGH && initialized==1) // if remote signal goes HIGH & door is initialized
{
Serial.println("Remote sigal");
Serial.println (active);
if (active == 0) // if NO command is active
{
switch (door_status)
{
case 0: // case door stautus is closed
Serial.println("Door opening");
active=1; // set active flag
last_dir = 0; // Set last dir of movement UP
open(); // open COMMAND
break;
case 1: // case door stautus is open
Serial.println("Door closing");
active=1;
last_dir = 1;
close();
break;
case 2: // case door stautus is stopped inbetween
Serial.println("Door resume");
active=1;
if (last_dir == 1){
close();
}
else{
open();
}
break;
}
}
}
else if (currentState == LOW && initialized == 0){ // Init button long press routine
Serial.println("Door initialization");
active=1;
initialize_door();
}
// Serial.println("A press is detected");
//
// pressedTime = millis();
// isPressing = true;
// isLongDetected = false;
// }
// else if (currentState == HIGH){
// isPressing = false;
// }
//
//
// if(isPressing == true && isLongDetected == false) {
// long pressDuration = millis() - pressedTime;
//
// if( pressDuration > LONG_PRESS_TIME ) {
// Serial.println("A long press is detected");
// isLongDetected = true;
//
}
void open() // Drive door UP
{
prevTimer = millis();
door_status=2;
analogWrite(speedpinA,pwm);
digitalWrite(pinI2,LOW);
digitalWrite(pinI1,HIGH);
while(active == 1){
if(millis() - prevTimer > 100){ // Update the Position every 1/10 seconds
updatePosition();
prevTimer = millis();
if (door_position >= door_open_pos){
stop();
//Serial.println("Door opened");
//Serial.print ("Door Position UP: ");
//Serial.println (door_position);
door_status=1;
active = 0;
}
if (door_position >= door_open_pos-300){
analogWrite(speedpinA,30);
}
if (door_position == prev_door_pos){
stop();
alarm=1;
Serial.println ("ALARM");
active = 0;
}
}
}
}
void close() // Drive door DOWN
{
prevTimer = millis();
door_status=2;
analogWrite(speedpinA,pwm);
digitalWrite(pinI2,HIGH);
digitalWrite(pinI1,LOW);
while(active == 1){
if(millis() - prevTimer > 100){
updatePosition();
prevTimer = millis();
if (door_position <= door_closed_pos){
stop();
//Serial.println("Door closed");
//Serial.print ("Door Position DOWN: ");
//Serial.println (door_position);
door_status=0;
active = 0;
}
if (door_position <= door_closed_pos+300){
analogWrite(speedpinA,50);
}
if (door_position == prev_door_pos){
stop();
alarm=1;
Serial.println ("ALARM");
active = 0;
}
}
}
}
void stop()
{
analogWrite(speedpinA,0);
digitalWrite(pinI2,HIGH);
digitalWrite(pinI1,HIGH);
}
void countSteps()
{
steps++;
}
void updatePosition()
{
if(last_dir == 0){
//Serial.print ("door position: ");
//Serial.println (door_position);
prev_door_pos = door_position;
door_position = door_position + steps;
steps = 0;
} else {
//Serial.print ("door position: ");
//Serial.println (door_position);
prev_door_pos = door_position;
door_position = door_position - steps;
steps = 0;
}}
void initialize_door() // Door initialization
{
prevTimer = millis();
door_status=2;
last_dir=1;
door_position = 10000;
while(active == 1){
analogWrite(speedpinA,50);
digitalWrite(pinI2,HIGH);
digitalWrite(pinI1,LOW);
if(millis() - prevTimer > 80){
updatePosition();
prevTimer = millis();
if (door_position == prev_door_pos){
stop();
Serial.println ("DETECTED CLOSED");
active = 0;
door_position = 0;
}
}
}
delay(3000);
active = 1;
last_dir=0;
prevTimer = millis();
while(active == 1){
analogWrite(speedpinA,50);
digitalWrite(pinI2,LOW);
digitalWrite(pinI1,HIGH);
if(millis() - prevTimer > 80){
updatePosition();
prevTimer = millis();
if (door_position == prev_door_pos){
stop();
Serial.println ("DETECTED OPEN");
active = 0;
door_position=door_position-100; //Compensate for belt slack
door_open_pos = door_position;
EEPROM.write(0, door_position);
//Serial.print("Door open position detected: ");
//Serial.println(door_position);
}
}
}
delay(3000);
active = 1;
last_dir=1;
close();
switch (alarm) {
case 0:
Serial.println ("Init sucessfull");
Serial.print("Door open position set: ");
Serial.println(door_open_pos);
initialized=1;
active=0;
break;
case 1:
Serial.println ("Init failed");
initialized=0;
break;
}
}

{kind=link}
Comments
Please log in or sign up to comment.