



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
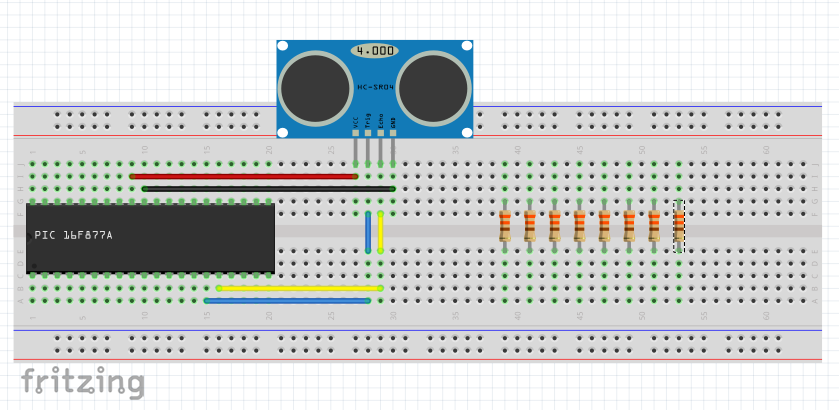
using the Distance sensor: HC-SR04 ultrasonic with microcontroller pic18f45k22 - 32MHz oscillator to measure CM and display the distance in a binary form using LEDS
you can find more details on how to calculate times with timer module in my
DigitalClock video(in this video the calculation is for overflow but the basic calculation is valid for compare as well): https://www.youtube.com/watch?v=k95RC...
Music: our distance by silent partner



{kind=link}
Comments
Please log in or sign up to comment.