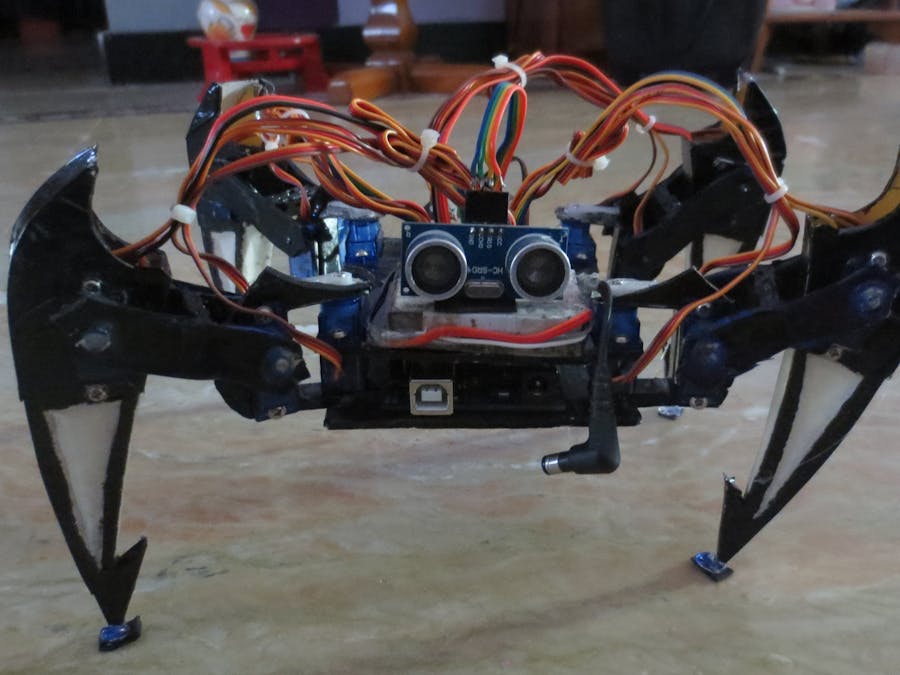
Arduino-based quadruped! Quadruped stands for four-legged bot, which is basically look like a four-legged spider, so let's learn how the spider walks and try to replicate it with Arduino.
Supplies:Step 1: Components Required- 1 X Arduino Mega or Arduino Uno
- 1 X Drilled PCB
- 12 X Servo Motors(9g)
- 1 X HC-SR04 Ultrasonic Sensor
- 4 X RGB LED
- Cardboard
Step 2: Maintaining CG
center of gravity (CG) is main factor while walking.Center of gravity remains in center of the body to stand balance if CG moves out of center on certain limits then balance will be affected and leads to falling down
So let us see about maintaining CG while walking.
If every leg is in 45 degree then the CG will be perfectly main in center, But if we moved any leg the cg will shift to that side so it lead to falling on that side.
So to avoid this the either end legs are maintained at an angle greater than 45 degree based on the bot size, so the three legs will form a triangle, were the CG will be inside it and the fourth leg will be free to move and CG will remain inside a triangle.
Step 3: Walking Procedure
- This is the starting position, with two legs(C, D) extended out on one side, and the other two legs(A, B) pulled inward.
- The top-right leg(B) lifts up and reaches out, far ahead of the robot.
- All the legs shift backward, moving the body forward.
- The back-left leg(D) lifts and steps forward alongside the body. This position is the mirror image of the starting position.
- The top-left leg(B) lifts and reaches out, far ahead of the robot.
- Again, all the legs shift backward, moving the body forward.
- The back-right leg lifts(B) and steps back into the body, bringing us back to the starting position.
Step 4: Plans for QuadrupedStep 5: Construction of Body
Construct the body according to PDF.
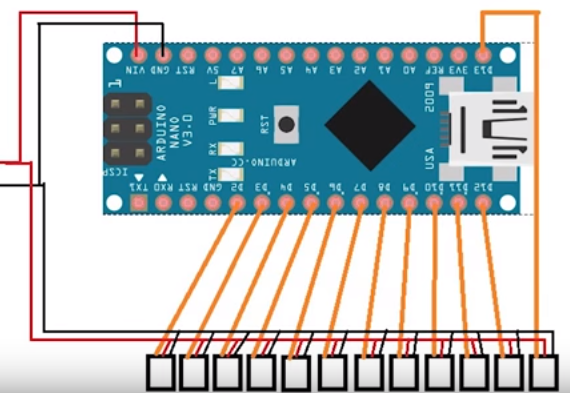
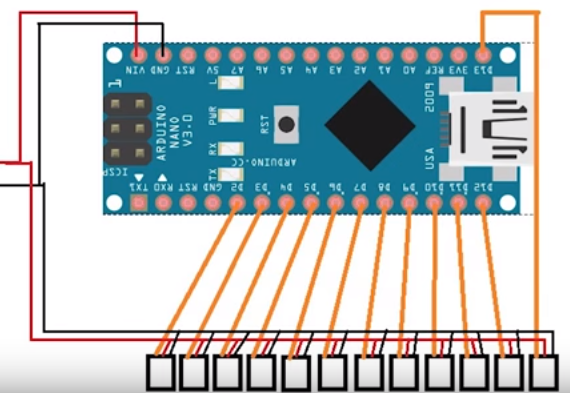
Step 6: Circuit Connection
Make your own shield according to your requirement arduino mega has 15 pwm pin, use 12 of them for servo connections and 3 for RBG led and any two pins for ultrasonic sensor
Step 7: Intialization of Servo- Upload the program to arduino mega and start assembling the leg according to picture
#include <Servo.h>
Servo servo[4][3];
const int servo_pin[4][3] = { {10,11,2}, {3,4,5}, {6,7,8}, {9, 12, 13} };
void setup()
{
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 3; j++)
{
servo[i][j].attach(servo_pin[i][j]);
delay(20);
}
}
}
void loop(void)
{
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 3; j++)
{
servo[i][j].write(90);
delay(20);
}
}
}
Step 8: Final Step
change the pin numbers according to servo number
#include <Servo.h>
#include <FlexiTimer2.h>
#define ledred 46
#define ledblue 44
#define ledgreen 45
Servo servo[4][3];
const int servo_pin[4][3] = { {2, 3, 4}, {20, 6, 7}, {8, 9, 17}, {16, 12, 13} };
const float length_a = 55;
const float length_b = 77.5;
const float length_c = 27.5;
const float length_side = 71;
const float z_absolute = -28;
const float z_default = -50, z_up = -30, z_boot = z_absolute;
const float x_default = 62, x_offset = 0;
const float y_start = 0, y_step = 40;
const float y_default = x_default;
volatile float site_now[4][3];
volatile float site_expect[4][3];
float temp_speed[4][3];
float move_speed;
float speed_multiple = 1;
const float spot_turn_speed = 4;
const float leg_move_speed = 8;
const float body_move_speed = 3;
const float stand_seat_speed = 1;
volatile int rest_counter;
const float KEEP = 255;
const float pi = 3.1415926;
const float temp_a = sqrt(pow(2 * x_default + length_side, 2) + pow(y_step, 2));
const float temp_b = 2 * (y_start + y_step) + length_side;
const float temp_c = sqrt(pow(2 * x_default + length_side, 2) + pow(2 * y_start + y_step + length_side, 2));
const float temp_alpha = acos((pow(temp_a, 2) + pow(temp_b, 2) - pow(temp_c, 2)) / 2 / temp_a / temp_b);
const float turn_x1 = (temp_a - length_side) / 2;
const float turn_y1 = y_start + y_step / 2;
const float turn_x0 = turn_x1 - temp_b * cos(temp_alpha);
const float turn_y0 = temp_b * sin(temp_alpha) - turn_y1 - length_side;
void setup()
{
pinMode(ledred,OUTPUT);
pinMode(ledblue,OUTPUT);
pinMode(ledgreen,OUTPUT);
Serial.begin(115200);
Serial.println("Robot starts initialization");
set_site(0, x_default - x_offset, y_start + y_step, z_boot);
set_site(1, x_default - x_offset, y_start + y_step, z_boot);
set_site(2, x_default + x_offset, y_start, z_boot);
set_site(3, x_default + x_offset, y_start, z_boot);
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 3; j++)
{
site_now[i][j] = site_expect[i][j];
}
}
FlexiTimer2::set(20, servo_service);
FlexiTimer2::start();
Serial.println("Servo service started");
servo_attach();
Serial.println("Servos initialized");
Serial.println("Robot initialization Complete");
}
void servo_attach(void)
{
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 3; j++)
{
servo[i][j].attach(servo_pin[i][j]);
delay(100);
}
}
}
void servo_detach(void)
{
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 3; j++)
{
servo[i][j].detach();
delay(100);
}
}
}
void loop()
{
analogWrite(ledred,255);
Serial.println("Stand");
stand();
delay(2000);
analogWrite(ledred,0);
analogWrite(ledblue,255);
Serial.println("Step forward");
step_forward(5);
delay(2000);
analogWrite(ledblue,0);
analogWrite(ledgreen,255);
Serial.println("Step back");
step_back(5);
delay(2000);
analogWrite(ledgreen,0);
analogWrite(ledred,255);
analogWrite(ledblue,255);
Serial.println("Turn left");
turn_left(5);
delay(2000);
analogWrite(ledgreen,255);
analogWrite(ledred,0);
analogWrite(ledblue,255);
Serial.println("Turn right");
turn_right(5);
delay(2000);
analogWrite(ledgreen,255);
analogWrite(ledred,255);
analogWrite(ledblue,0);
Serial.println("Hand wave");
hand_wave(3);
delay(2000);
Serial.println("Hand wave");
hand_shake(3);
delay(2000);
int x=100;
for(int i=0;i<5;i++)
{
analogWrite(ledgreen,255);
analogWrite(ledred,255);
analogWrite(ledblue,255);
delay(x);
analogWrite(ledgreen,255);
analogWrite(ledred,255);
analogWrite(ledblue,0);
delay(x);
analogWrite(ledgreen,255);
analogWrite(ledred,0);
analogWrite(ledblue,255);
delay(x);
analogWrite(ledgreen,0);
analogWrite(ledred,255);
analogWrite(ledblue,255);
delay(x) ;
analogWrite(ledgreen,0);
analogWrite(ledred,255);
analogWrite(ledblue,0);
delay(x);
analogWrite(ledgreen,0);
analogWrite(ledred,0);
analogWrite(ledblue,255);
delay(x);
analogWrite(ledgreen,255);
analogWrite(ledred,0);
analogWrite(ledblue,0);
delay(x) ;
}
analogWrite(ledgreen,0);
analogWrite(ledred,0);
analogWrite(ledblue,0);
delay(1000);
}
void sit(void)
{
move_speed = stand_seat_speed;
for (int leg = 0; leg < 4; leg++)
{
set_site(leg, KEEP, KEEP, z_boot);
}
wait_all_reach();
}
void stand(void)
{
move_speed = stand_seat_speed;
for (int leg = 0; leg < 4; leg++)
{
set_site(leg, KEEP, KEEP, z_default);
}
wait_all_reach();
}
void turn_left(unsigned int step)
{
move_speed = spot_turn_speed;
while (step-- > 0)
{
if (site_now[3][1] == y_start)
{
set_site(3, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, turn_x1 - x_offset, turn_y1, z_default);
set_site(1, turn_x0 - x_offset, turn_y0, z_default);
set_site(2, turn_x1 + x_offset, turn_y1, z_default);
set_site(3, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(3, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(0, turn_x1 + x_offset, turn_y1, z_default);
set_site(1, turn_x0 + x_offset, turn_y0, z_default);
set_site(2, turn_x1 - x_offset, turn_y1, z_default);
set_site(3, turn_x0 - x_offset, turn_y0, z_default);
wait_all_reach();
set_site(1, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_default);
set_site(1, x_default + x_offset, y_start, z_up);
set_site(2, x_default - x_offset, y_start + y_step, z_default);
set_site(3, x_default - x_offset, y_start + y_step, z_default);
wait_all_reach();
set_site(1, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
else
{
set_site(0, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, turn_x0 + x_offset, turn_y0, z_up);
set_site(1, turn_x1 + x_offset, turn_y1, z_default);
set_site(2, turn_x0 - x_offset, turn_y0, z_default);
set_site(3, turn_x1 - x_offset, turn_y1, z_default);
wait_all_reach();
set_site(0, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(0, turn_x0 - x_offset, turn_y0, z_default);
set_site(1, turn_x1 - x_offset, turn_y1, z_default);
set_site(2, turn_x0 + x_offset, turn_y0, z_default);
set_site(3, turn_x1 + x_offset, turn_y1, z_default);
wait_all_reach();
set_site(2, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(0, x_default - x_offset, y_start + y_step, z_default);
set_site(1, x_default - x_offset, y_start + y_step, z_default);
set_site(2, x_default + x_offset, y_start, z_up);
set_site(3, x_default + x_offset, y_start, z_default);
wait_all_reach();
set_site(2, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
}
}
void turn_right(unsigned int step)
{
move_speed = spot_turn_speed;
while (step-- > 0)
{
if (site_now[2][1] == y_start)
{
set_site(2, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, turn_x0 - x_offset, turn_y0, z_default);
set_site(1, turn_x1 - x_offset, turn_y1, z_default);
set_site(2, turn_x0 + x_offset, turn_y0, z_up);
set_site(3, turn_x1 + x_offset, turn_y1, z_default);
wait_all_reach();
set_site(2, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(0, turn_x0 + x_offset, turn_y0, z_default);
set_site(1, turn_x1 + x_offset, turn_y1, z_default);
set_site(2, turn_x0 - x_offset, turn_y0, z_default);
set_site(3, turn_x1 - x_offset, turn_y1, z_default);
wait_all_reach();
set_site(0, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_up);
set_site(1, x_default + x_offset, y_start, z_default);
set_site(2, x_default - x_offset, y_start + y_step, z_default);
set_site(3, x_default - x_offset, y_start + y_step, z_default);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
else
{
set_site(1, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, turn_x1 + x_offset, turn_y1, z_default);
set_site(1, turn_x0 + x_offset, turn_y0, z_up);
set_site(2, turn_x1 - x_offset, turn_y1, z_default);
set_site(3, turn_x0 - x_offset, turn_y0, z_default);
wait_all_reach();
set_site(1, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(0, turn_x1 - x_offset, turn_y1, z_default);
set_site(1, turn_x0 - x_offset, turn_y0, z_default);
set_site(2, turn_x1 + x_offset, turn_y1, z_default);
set_site(3, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(3, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(0, x_default - x_offset, y_start + y_step, z_default);
set_site(1, x_default - x_offset, y_start + y_step, z_default);
set_site(2, x_default + x_offset, y_start, z_default);
set_site(3, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
}
}
void step_forward(unsigned int step)
{
move_speed = leg_move_speed;
while (step-- > 0)
{
if (site_now[2][1] == y_start)
{
set_site(2, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(2, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(2, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = body_move_speed;
set_site(0, x_default + x_offset, y_start, z_default);
set_site(1, x_default + x_offset, y_start + 2 * y_step, z_default);
set_site(2, x_default - x_offset, y_start + y_step, z_default);
set_site(3, x_default - x_offset, y_start + y_step, z_default);
wait_all_reach();
move_speed = leg_move_speed;
set_site(1, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(1, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(1, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
else
{
set_site(0, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = body_move_speed;
set_site(0, x_default - x_offset, y_start + y_step, z_default);
set_site(1, x_default - x_offset, y_start + y_step, z_default);
set_site(2, x_default + x_offset, y_start, z_default);
set_site(3, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = leg_move_speed;
set_site(3, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
}
}
void step_back(unsigned int step)
{
move_speed = leg_move_speed;
while (step-- > 0)
{
if (site_now[3][1] == y_start)
{
set_site(3, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = body_move_speed;
set_site(0, x_default + x_offset, y_start + 2 * y_step, z_default);
set_site(1, x_default + x_offset, y_start, z_default);
set_site(2, x_default - x_offset, y_start + y_step, z_default);
set_site(3, x_default - x_offset, y_start + y_step, z_default);
wait_all_reach();
move_speed = leg_move_speed;
set_site(0, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
else
{
set_site(1, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(1, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(1, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = body_move_speed;
set_site(0, x_default - x_offset, y_start + y_step, z_default);
set_site(1, x_default - x_offset, y_start + y_step, z_default);
set_site(2, x_default + x_offset, y_start + 2 * y_step, z_default);
set_site(3, x_default + x_offset, y_start, z_default);
wait_all_reach();
move_speed = leg_move_speed;
set_site(2, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(2, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(2, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
}
}
void body_left(int i)
{
set_site(0, site_now[0][0] + i, KEEP, KEEP);
set_site(1, site_now[1][0] + i, KEEP, KEEP);
set_site(2, site_now[2][0] - i, KEEP, KEEP);
set_site(3, site_now[3][0] - i, KEEP, KEEP);
wait_all_reach();
}
void body_right(int i)
{
set_site(0, site_now[0][0] - i, KEEP, KEEP);
set_site(1, site_now[1][0] - i, KEEP, KEEP);
set_site(2, site_now[2][0] + i, KEEP, KEEP);
set_site(3, site_now[3][0] + i, KEEP, KEEP);
wait_all_reach();
}
void hand_wave(int i)
{
float x_tmp;
float y_tmp;
float z_tmp;
move_speed = 1;
if (site_now[3][1] == y_start)
{
body_right(15);
x_tmp = site_now[2][0];
y_tmp = site_now[2][1];
z_tmp = site_now[2][2];
move_speed = body_move_speed;
for (int j = 0; j < i; j++)
{
set_site(2, turn_x1, turn_y1, 50);
wait_all_reach();
set_site(2, turn_x0, turn_y0, 50);
wait_all_reach();
}
set_site(2, x_tmp, y_tmp, z_tmp);
wait_all_reach();
move_speed = 1;
body_left(15);
}
else
{
body_left(15);
x_tmp = site_now[0][0];
y_tmp = site_now[0][1];
z_tmp = site_now[0][2];
move_speed = body_move_speed;
for (int j = 0; j < i; j++)
{
set_site(0, turn_x1, turn_y1, 50);
wait_all_reach();
set_site(0, turn_x0, turn_y0, 50);
wait_all_reach();
}
set_site(0, x_tmp, y_tmp, z_tmp);
wait_all_reach();
move_speed = 1;
body_right(15);
}
}
void hand_shake(int i)
{
float x_tmp;
float y_tmp;
float z_tmp;
move_speed = 1;
if (site_now[3][1] == y_start)
{
body_right(15);
x_tmp = site_now[2][0];
y_tmp = site_now[2][1];
z_tmp = site_now[2][2];
move_speed = body_move_speed;
for (int j = 0; j < i; j++)
{
set_site(2, x_default - 30, y_start + 2 * y_step, 55);
wait_all_reach();
set_site(2, x_default - 30, y_start + 2 * y_step, 10);
wait_all_reach();
}
set_site(2, x_tmp, y_tmp, z_tmp);
wait_all_reach();
move_speed = 1;
body_left(15);
}
else
{
body_left(15);
x_tmp = site_now[0][0];
y_tmp = site_now[0][1];
z_tmp = site_now[0][2];
move_speed = body_move_speed;
for (int j = 0; j < i; j++)
{
set_site(0, x_default - 30, y_start + 2 * y_step, 55);
wait_all_reach();
set_site(0, x_default - 30, y_start + 2 * y_step, 10);
wait_all_reach();
}
set_site(0, x_tmp, y_tmp, z_tmp);
wait_all_reach();
move_speed = 1;
body_right(15);
}
}
void head_up(int i)
{
set_site(0, KEEP, KEEP, site_now[0][2] - i);
set_site(1, KEEP, KEEP, site_now[1][2] + i);
set_site(2, KEEP, KEEP, site_now[2][2] - i);
set_site(3, KEEP, KEEP, site_now[3][2] + i);
wait_all_reach();
}
void head_down(int i)
{
set_site(0, KEEP, KEEP, site_now[0][2] + i);
set_site(1, KEEP, KEEP, site_now[1][2] - i);
set_site(2, KEEP, KEEP, site_now[2][2] + i);
set_site(3, KEEP, KEEP, site_now[3][2] - i);
wait_all_reach();
}
void body_dance(int i)
{
float x_tmp;
float y_tmp;
float z_tmp;
float body_dance_speed = 2;
sit();
move_speed = 1;
set_site(0, x_default, y_default, KEEP);
set_site(1, x_default, y_default, KEEP);
set_site(2, x_default, y_default, KEEP);
set_site(3, x_default, y_default, KEEP);
wait_all_reach();
set_site(0, x_default, y_default, z_default - 20);
set_site(1, x_default, y_default, z_default - 20);
set_site(2, x_default, y_default, z_default - 20);
set_site(3, x_default, y_default, z_default - 20);
wait_all_reach();
move_speed = body_dance_speed;
head_up(30);
for (int j = 0; j < i; j++)
{
if (j > i / 4)
move_speed = body_dance_speed * 2;
if (j > i / 2)
move_speed = body_dance_speed * 3;
set_site(0, KEEP, y_default - 20, KEEP);
set_site(1, KEEP, y_default + 20, KEEP);
set_site(2, KEEP, y_default - 20, KEEP);
set_site(3, KEEP, y_default + 20, KEEP);
wait_all_reach();
set_site(0, KEEP, y_default + 20, KEEP);
set_site(1, KEEP, y_default - 20, KEEP);
set_site(2, KEEP, y_default + 20, KEEP);
set_site(3, KEEP, y_default - 20, KEEP);
wait_all_reach();
}
move_speed = body_dance_speed;
head_down(30);
}
void servo_service(void)
{
sei();
static float alpha, beta, gamma;
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 3; j++)
{
if (abs(site_now[i][j] - site_expect[i][j]) >= abs(temp_speed[i][j]))
site_now[i][j] += temp_speed[i][j];
else
site_now[i][j] = site_expect[i][j];
}
cartesian_to_polar(alpha, beta, gamma, site_now[i][0], site_now[i][1], site_now[i][2]);
polar_to_servo(i, alpha, beta, gamma);
}
rest_counter++;
}
void set_site(int leg, float x, float y, float z)
{
float length_x = 0, length_y = 0, length_z = 0;
if (x != KEEP)
length_x = x - site_now[leg][0];
if (y != KEEP)
length_y = y - site_now[leg][1];
if (z != KEEP)
length_z = z - site_now[leg][2];
float length = sqrt(pow(length_x, 2) + pow(length_y, 2) + pow(length_z, 2));
temp_speed[leg][0] = length_x / length * move_speed * speed_multiple;
temp_speed[leg][1] = length_y / length * move_speed * speed_multiple;
temp_speed[leg][2] = length_z / length * move_speed * speed_multiple;
if (x != KEEP)
site_expect[leg][0] = x;
if (y != KEEP)
site_expect[leg][1] = y;
if (z != KEEP)
site_expect[leg][2] = z;
}
void wait_reach(int leg)
{
while (1)
if (site_now[leg][0] == site_expect[leg][0])
if (site_now[leg][1] == site_expect[leg][1])
if (site_now[leg][2] == site_expect[leg][2])
break;
}
void wait_all_reach(void)
{
for (int i = 0; i < 4; i++)
wait_reach(i);
}
void cartesian_to_polar(volatile float &alpha, volatile float &beta, volatile float &gamma, volatile float x, volatile float y, volatile float z)
{
float v, w;
w = (x >= 0 ? 1 : -1) * (sqrt(pow(x, 2) + pow(y, 2)));
v = w - length_c;
alpha = atan2(z, v) + acos((pow(length_a, 2) - pow(length_b, 2) + pow(v, 2) + pow(z, 2)) / 2 / length_a / sqrt(pow(v, 2) + pow(z, 2)));
beta = acos((pow(length_a, 2) + pow(length_b, 2) - pow(v, 2) - pow(z, 2)) / 2 / length_a / length_b);
gamma = (w >= 0) ? atan2(y, x) : atan2(-y, -x);
alpha = alpha / pi * 180;
beta = beta / pi * 180;
gamma = gamma / pi * 180;
}
void polar_to_servo(int leg, float alpha, float beta, float gamma)
{
if (leg == 0)
{
alpha = 90 - alpha;
beta = beta;
gamma += 90;
}
else if (leg == 1)
{
alpha += 90;
beta = 180 - beta;
gamma = 90 - gamma;
}
else if (leg == 2)
{
alpha += 90;
beta = 180 - beta;
gamma = 90 - gamma;
}
else if (leg == 3)
{
alpha = 90 - alpha;
beta = beta;
gamma += 90;
}
servo[leg][0].write(alpha);
servo[leg][1].write(beta);
servo[leg][2].write(gamma);
}
Connect the led pins
- That's it, your quadruped is ready!
- Upload the program.
- Connect the servo according to the pins defined in the program.



_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.