

Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
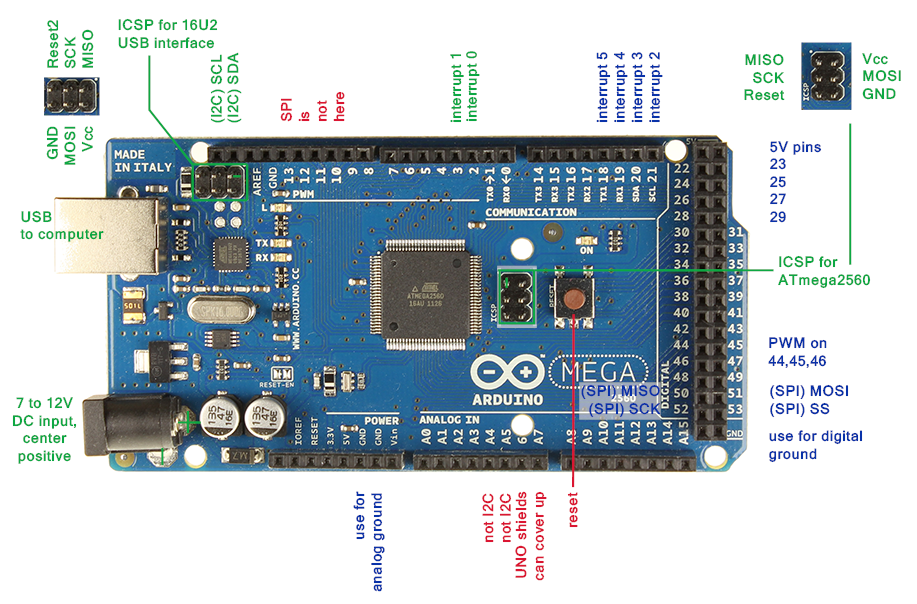
Due to the TFT is using all the pins in the Arduino UNO y migrate to the -mEGA 2560.
See attachment for the pins correspondence.
Continuous rotating concept.
Looking on the web I have found a simple design for the rotation.
Slip ring will provide electric connectiviy between sensor HC-SR04 and the Arduino MEGA 2560. The slip ring will be between the motor gear and the fix support. The wires will no break.
A video with this project adapted to move a servomotor with a sweep of 180 degress, can be shown here:
.........................................
If you did like this project you can donate some cents of Crypto currency
Bitcoins SV in the following address.
1sAZQMy5Ci1G88CmbucFJDsF7TxeXAcko
or bitcoin cash in the address:
qzmjpeqrlgd3flltpavm9t2xh0nz8y97mggajvvqnv
or Stellar XLM in the address:
GBAWDPQ4FTRXWE2ZUWVYYZ7XSCQGBYZGOWQMAHSA2FPGJ5QTLF4IJ3NX
thanks
#include <gfxfont.h>
#include <firFilter.h>
firFilter Filter;
int value;
int filtered;
#include "TouchScreen.h" // C:\Program Files (x86)\Arduino\libraries\Touch-Screen-Library-master
#include <Adafruit_GFX.h> // Hardware-specific library
#include <Adafruit_TFTLCD.h> // Hardware-specific library
#include <SPI.h>
#include <Servo.h>
#include <SD.h>
#define SD_CS 53 // CHIP SELECT CARTA SD DEL TFT USANDO MEGA
#define LCD_CS A3 // Chip Select goes to Analog 3
#define LCD_CD A2 // Command/Data goes to Analog 2
#define LCD_WR A1 // LCD Write goes to Analog 1
#define LCD_RD A0 // LCD Read goes to Analog 0
#define LCD_RESET A4 // Can alternately just connect to Arduino's reset pin
// Pins for the LCD Shield
#define YP A2 // must be analog
#define XM A3 // must be analog
#define YM 8 // digital or analog pin
#define XP 9 // digital or analog pin
#define MINPRESSURE 1
#define MAXPRESSURE 1000
// Calibration mins and max for raw data when touching edges of screen
#define TS_MINX 210
#define TS_MINY 210
#define TS_MAXX 915
#define TS_MAXY 910
// Assign human-readable names to some common 16-bit color values:
#define BLACK 0x0000
#define BLUE 0x001F
#define BLUE2 0x00FF
#define RED 0xF800
#define GREEN 0x07E0
#define CYAN 0x07FF
#define MAGENTA 0xF81F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
//Declaraciones para el Sensor TCRT5000
int sensorTCRT5000 = A15;
int sensorValue = 0;
float sensorValor=0.00;
int n=0;
//Declaraciones para el Ultrasonidos
long tiempo;
int Trig = 11; // triger
int Echo = 12; // echo
//Declaraciones para el Motor
int motor = 13;
float Dist,Dist1,Dist2;
Adafruit_TFTLCD tft(LCD_CS, LCD_CD, LCD_WR, LCD_RD, LCD_RESET);
int touchCnt = 0;
int buttonState = 0;
TouchScreen ts = TouchScreen(XP, YP, XM, YM, 300);
uint16_t x = 50, y = 100;
String inputString = ""; // a string to hold incoming data
boolean stringComplete = false; // whether the string is complete
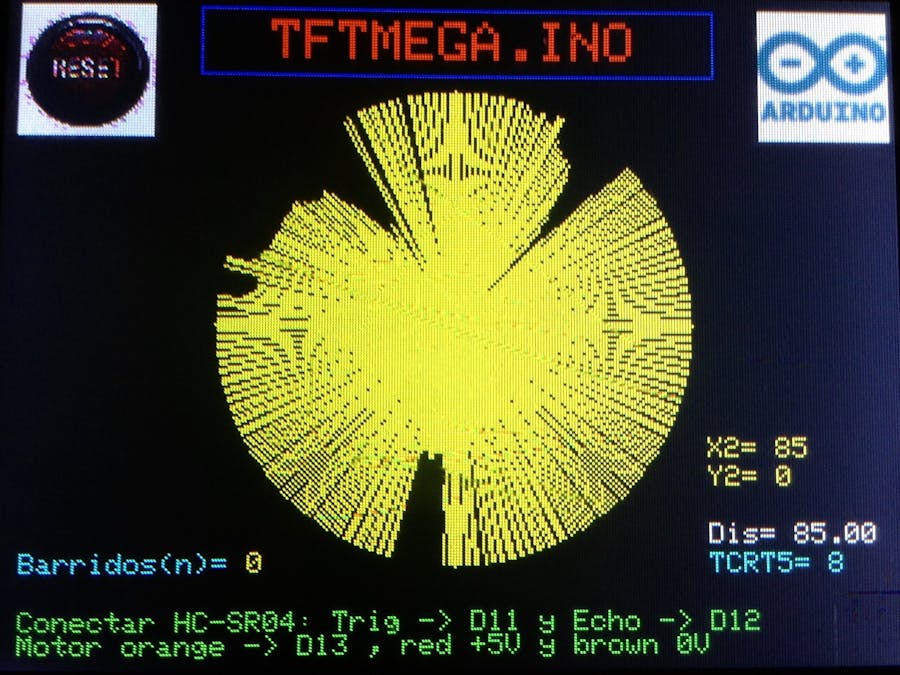
String nombre_fichero_ino = "TFTMEGA.INO";
void setup()
{
//Configurar HC-SR04 Sensor Ultrasonidos.
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
pinMode(motor, OUTPUT);
uint16_t tmp;
Serial.begin(9600);
Filter.begin();
Serial.print(F("[SBS:256,256][SPC:#FF0000,#00FF00]"));
// reserve 200 bytes for the inputString:
inputString.reserve(200);
//reset tft y espera a que vuelva en s
tft.reset();
delay(1000);
tft.begin(9600);
delay(1000);
uint16_t identifier = tft.readID();
Serial.print("El ID de la placa tft es = 0x");
Serial.println(identifier, HEX);
tft.begin(identifier);
tft.fillScreen(BLACK);
Serial.print(F("Initializing SD card..."));
tft.setRotation(1);
tft.setTextSize(2);
tft.print("ID placa tft = 0x");
tft.println(identifier, HEX);
delay(300);
tft.println("");
tft.println(F("Inicializando carta SD..."));
delay(200);
//Verificamos si hay carta SD en el slot
if (!SD.begin(SD_CS))
{
//Si no est la SD
tft.println("Error:No puedo acceder a la SD");
Serial.println(F("Error:No puedo acceder a la SD"));
return;
}
//Si S est la SD
Serial.println(F("OK!"));
tft.print(F("...."));
delay(50);
tft.println(F(".............."));
tft.println(F(""));
tft.println(F("SD lista!"));
tft.println(" ");
tft.println(F(".............."));
tft.println(" ");
tft.println(nombre_fichero_ino);
tft.println(" ");
tft.println("rjuarez7@gmail.com");
bmpDraw("4.bmp", 0, 0);
delay(100);
}
void loop()
{
//tactil();
//delay(1000);
sonar();
}
void sonar()
{
float rad,r2;
int x2,y2;
r2=0.0;
digitalWrite (motor, LOW);
delay(500);
tft.fillScreen(BLACK);
bmpDraw("1.bmp", 270, 5);
bmpDraw("12.bmp", 5, 5);
tft.drawPixel(160, 120, CYAN);
tft.setCursor(94, 10);
tft.drawRect(69, 5, 185,25,BLUE);
tft.setTextSize(2);
tft.setTextColor(RED);
tft.println(nombre_fichero_ino);
tft.fillRect(240,150,60,60,BLACK);
tft.setTextSize(1);
tft.setTextColor(YELLOW);
tft.setCursor(250, 160);
tft.print("X2= ");
tft.setCursor(250, 170);
tft.print("Y2= ");
tft.setCursor(250, 190);
tft.print("Dis= ");
tft.setCursor(10, 200);
tft.print("Barridos(n)= ");
tft.fillRect(85,200,60,10,BLACK);
tft.println(n);
tft.setTextSize(1);
tft.setTextColor(GREEN);
tft.setCursor(10, 220);
tft.println("Conectar HC-SR04: Trig -> D11 y Echo -> D12");
tft.setCursor(10, 228);
tft.println("Motor orange -> D13 , red +5V y brown 0V");
n++;
while(1) {
for (float i=0; i <= 360; i=i+1){
ultrasonido(Dist);
delay(100);
filtered= Filter.run(Dist);
filtered=constrain(filtered,0,85);
Serial.println(filtered);
r2=filtered;
analogWrite(motor,255/r2); // el led 13 se iluminams si se acerca objeto al sonar
rad=i*2*PI/360;
x2=r2*cos(rad);
y2=r2*sin(rad);
tft.drawLine(160,120, x2+160, y2+120, YELLOW); //DIBUJA DE MANERA POLAR LA DISTANCIA QUE MIDE EL SENSOR.
tft.setCursor(250, 160);
tft.setTextSize(1);
tft.setTextColor(YELLOW);
tft.fillRect(252,160,60,10,BLACK);
tft.print("X2= ");
tft.println(x2);
tft.setCursor(250, 170);
tft.fillRect(252,170,60,10,BLACK);
tft.print("Y2= ");
tft.println(y2);
tft.setCursor(250, 190);
tft.fillRect(250,190,60,10,BLACK);
tft.setTextColor(WHITE);
tft.print("Dis= ");
tft.println(r2);
tft.setCursor(250, 200);
tft.fillRect(250,200,80,10,BLACK);
tft.setTextColor(CYAN);
tft.print("TCRT5= ");
tft.println( analogRead(sensorTCRT5000));
//Serial.print(" A5=");Serial.print(analogRead(A5));Serial.print(" A4=");Serial.print(analogRead(A4));Serial.print(" A3=");Serial.print(analogRead(A3));Serial.print(" A2=");Serial.print(analogRead(A2)); Serial.print(" A1=");Serial.print(analogRead(A1));Serial.print(" A0=");Serial.println(analogRead(A0));
}
tft.setCursor(10, 200);
tft.print("Barridos(n)= ");
delay(100);
tft.fillRect(85,200,60,10,BLACK);
tft.println(n);
n++;
tft.fillCircle(160, 120, 90,BLACK);
tft.drawPixel(160, 120, CYAN);
}
}
/*Este mdulo calcula y devuelve la distancia en cm.*/
void ultrasonido (float &Distancia){
//Para estabilizar el valor del pin Trig se establece a LOW
digitalWrite (Trig, LOW);
delay(10);
//Se lanzan los 8 pulsos
digitalWrite (Trig, HIGH);
delay(10);
digitalWrite (Trig, LOW);
/*
Se mide el tiempo que tarda la seal en regresar y se calcula la distancia.
Observa que al realizar pulseIn el valor que se obtiene es tiempo, no distancia
Se est reutilizando la variable Distancia.
*/
Distancia= pulseIn (Echo, HIGH);
Distancia=Distancia/58;
delay(10);
}
void tactil()
{
TSPoint p = ts.getPoint();
// we have some minimum pressure we consider 'valid'
// pressure of 0 means no pressing!
if (p.z > ts.pressureThreshhold) {
Serial.print("X = "); Serial.print(p.x);
Serial.print("\tY = "); Serial.print(p.y);
Serial.print("\tPressure = "); Serial.println(p.z);
tft.setCursor(250, 160);
tft.setTextSize(1);
tft.setTextColor(YELLOW);
tft.fillRect(252,160,60,10,BLACK);
tft.print("X2= ");
tft.println(p.x);
tft.setCursor(250, 170);
tft.fillRect(252,170,60,10,BLACK);
tft.print("Y2= ");
tft.println(p.y);
tft.setCursor(250, 190);
tft.print("Dis= ");
tft.println(p.z);
}
delay(100);
}
/////////////////////////////////////////////////////
// This function opens a Windows Bitmap (BMP) file and
// displays it at the given coordinates. It's sped up
// by reading many pixels worth of data at a time
// (rather than pixel by pixel). Increasing the buffer
// size takes more of the Arduino's precious RAM but
// makes loading a little faster. 20 pixels seems a
// good balance.
#define BUFFPIXEL 20
void bmpDraw(char *filename, int x, int y) {
File bmpFile;
int bmpWidth, bmpHeight; // W+H in pixels
uint8_t bmpDepth; // Bit depth (currently must be 24)
uint32_t bmpImageoffset; // Start of image data in file
uint32_t rowSize; // Not always = bmpWidth; may have padding
uint8_t sdbuffer[3*BUFFPIXEL]; // pixel in buffer (R+G+B per pixel)
uint16_t lcdbuffer[BUFFPIXEL]; // pixel out buffer (16-bit per pixel)
uint8_t buffidx = sizeof(sdbuffer); // Current position in sdbuffer
boolean goodBmp = false; // Set to true on valid header parse
boolean flip = true; // BMP is stored bottom-to-top
int w, h, row, col;
uint8_t r, g, b;
uint32_t pos = 0, startTime = millis();
uint8_t lcdidx = 0;
boolean first = true;
if((x >= tft.width()) || (y >= tft.height())) return;
Serial.println();
Serial.print(F("Loading image '"));
Serial.print(filename);
Serial.println('\'');
// Open requested file on SD card
if ((bmpFile = SD.open(filename)) == NULL) {
Serial.println(F("File not found"));
return;
}
// Parse BMP header
if(read16(bmpFile) == 0x4D42) { // BMP signature
Serial.println(F("File size: ")); Serial.println(read32(bmpFile));
(void)read32(bmpFile); // Read & ignore creator bytes
bmpImageoffset = read32(bmpFile); // Start of image data
Serial.print(F("Image Offset: ")); Serial.println(bmpImageoffset, DEC);
// Read DIB header
Serial.print(F("Header size: ")); Serial.println(read32(bmpFile));
bmpWidth = read32(bmpFile);
bmpHeight = read32(bmpFile);
if(read16(bmpFile) == 1) { // # planes -- must be '1'
bmpDepth = read16(bmpFile); // bits per pixel
Serial.print(F("Bit Depth: ")); Serial.println(bmpDepth);
if((bmpDepth == 24) && (read32(bmpFile) == 0)) { // 0 = uncompressed
goodBmp = true; // Supported BMP format -- proceed!
Serial.print(F("Image size: "));
Serial.print(bmpWidth);
Serial.print('x');
Serial.println(bmpHeight);
// BMP rows are padded (if needed) to 4-byte boundary
rowSize = (bmpWidth * 3 + 3) & ~3;
// If bmpHeight is negative, image is in top-down order.
// This is not canon but has been observed in the wild.
if(bmpHeight < 0) {
bmpHeight = -bmpHeight;
flip = false;
}
// Crop area to be loaded
w = bmpWidth;
h = bmpHeight;
if((x+w-1) >= tft.width()) w = tft.width() - x;
if((y+h-1) >= tft.height()) h = tft.height() - y;
// Set TFT address window to clipped image bounds
tft.setAddrWindow(x, y, x+w-1, y+h-1);
for (row=0; row<h; row++) { // For each scanline...
// Seek to start of scan line. It might seem labor-
// intensive to be doing this on every line, but this
// method covers a lot of gritty details like cropping
// and scanline padding. Also, the seek only takes
// place if the file position actually needs to change
// (avoids a lot of cluster math in SD library).
if(flip) // Bitmap is stored bottom-to-top order (normal BMP)
pos = bmpImageoffset + (bmpHeight - 1 - row) * rowSize;
else // Bitmap is stored top-to-bottom
pos = bmpImageoffset + row * rowSize;
if(bmpFile.position() != pos) { // Need seek?
bmpFile.seek(pos);
buffidx = sizeof(sdbuffer); // Force buffer reload
}
for (col=0; col<w; col++) { // For each column...
// Time to read more pixel data?
if (buffidx >= sizeof(sdbuffer)) { // Indeed
// Push LCD buffer to the display first
if(lcdidx > 0) {
tft.pushColors(lcdbuffer, lcdidx, first);
lcdidx = 0;
first = false;
}
bmpFile.read(sdbuffer, sizeof(sdbuffer));
buffidx = 0; // Set index to beginning
}
// Convert pixel from BMP to TFT format
b = sdbuffer[buffidx++];
g = sdbuffer[buffidx++];
r = sdbuffer[buffidx++];
lcdbuffer[lcdidx++] = tft.color565(r,g,b);
} // end pixel
} // end scanline
// Write any remaining data to LCD
if(lcdidx > 0) {
tft.pushColors(lcdbuffer, lcdidx, first);
}
Serial.print(F("Loaded in "));
Serial.print(millis() - startTime);
Serial.println(" ms");
} // end goodBmp
}
}
bmpFile.close();
if(!goodBmp) Serial.println(F("BMP format not recognized."));
}
// These read 16- and 32-bit types from the SD card file.
// BMP data is stored little-endian, Arduino is little-endian too.
// May need to reverse subscript order if porting elsewhere.
uint16_t read16(File f) {
uint16_t result;
((uint8_t *)&result)[0] = f.read(); // LSB
((uint8_t *)&result)[1] = f.read(); // MSB
return result;
}
uint32_t read32(File f) {
uint32_t result;
((uint8_t *)&result)[0] = f.read(); // LSB
((uint8_t *)&result)[1] = f.read();
((uint8_t *)&result)[2] = f.read();
((uint8_t *)&result)[3] = f.read(); // MSB
return result;
}




{kind=link}
Comments