

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
| ||||||
| ||||||
| ||||||
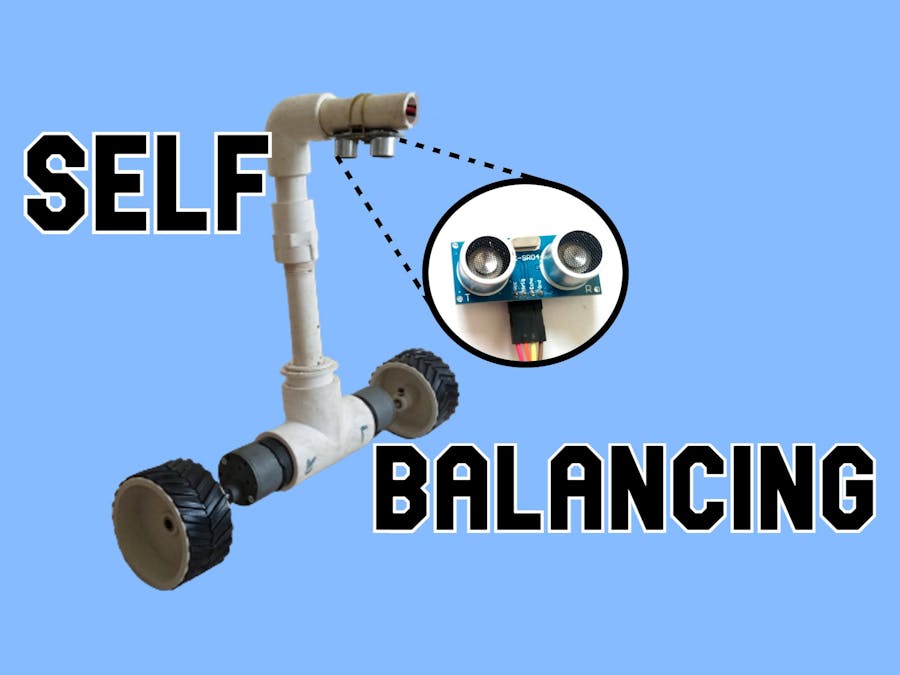
This is a wheeled self-balancing robot. Powered by Arduino UNO and balanced by ultrasonic sensor. It is able to balance itself vertically.
Geared DC MotorWe will be using two geared dc motors to power this robot.
Attaching Wheels to Geared DC MotorNow we will attach wheels to the shafts of the motors.
PVC T-JointThis is a T-joint for PVC pipe. We will be using it to hold the motors. The wires will come out from the top hole.
Wiring Motors Through T-jointBefore fixing the motor in this pipe, we have to wire them. We will be passing 4 wires from the top hole. Splitting at two ends, 2 wires for each motor.
Pulling Wires Through Top HoleWe will pull the wire from T-joint back so that the motors will be in their place.
Fixing Motors in PlaceNow we have fixed the motor in the T-joint.
Adding Pipes in Top Hole to Mount Ultrasonic SensorWe have added some pipes at the wire end of the T-Joint. We will mount the sensor on it later.
Circuit SchematicHere is the Circuit Schematic. We have used L2938 H bridge motor driver IC to rotate motors in both directions.
Concept of the Self Balancing RobotThe concept for this self-balancing robot is simple. Here we have an ultrasonic sensor. Which measures its distance from the obstacle in front of it.
if the distance is greater than the fixed distance then the robot will move forward and if the distance is less, then the robot will move reverse. to compensate for its fall.
Wiring Ultrasonic Sensor With Arduino for Self Balancing RobotThe ultrasonic sensor has 4 pins, which are trigger, echo, power, and ground. 4 wires are connected from the pins to the microcontroller.
Watching the Robot Balance ItselfNow, the robot is placed vertically on the ground. And it seems like, it is balanced. It is moving continuously to keep itself balanced.
But, it is also getting some support from the wires, which I am holding in my hand.
It is oscillating back & forth continuously, these oscillations need to be damped. So, the robot will be balanced and stand at a point without any movement.
Issues & Resolutions in Self Balancing RobotIf it falls beyond a particular point, then it won't be able to recover itself.
These motors require a lot more power to be fast and responsive.
And while testing, the second H-bridge of the L293D got fried. So, I didn't get the chance to control it via PID.
To truly make it balanced, we could have used the MPU-6050 Inertial measurement unit. Instead, we used this cheap ultrasonic sensor.
CAD Design of the Self Balancing RobotThis is the CAD, design of the wheeled self-balancing robot. Here we can see two motors, connected with two wheels. These motors are mounted in the PVC T-joint. a vertical PVC pipe is attached to T-joint. An ultrasonic sensor is attached to the pipe. Pointing downwards.
ConclusionBut, somehow we managed to make it balanced a little bit. We are happy with the results.




Comments