



Hardware components | ||||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
My seven year old wanted to make a robot to pick up rubbish, this is the result.
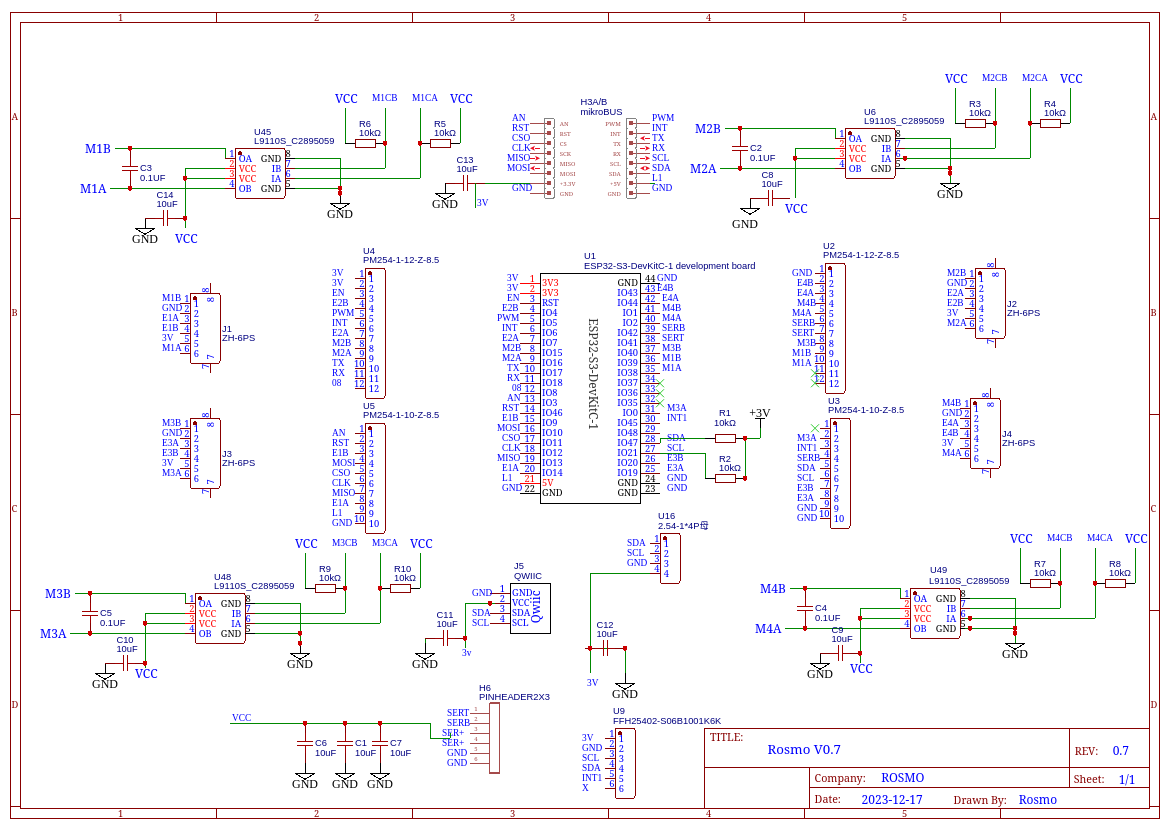
A low-cost wheeled robot chassis for those looking to experiment with the Robot Operating System 2 (ROS 2) or MicroBlocks: the open source Rosmo, designed to be buildable without soldering or access to a 3D printer.
The Rosmo is a two- or four-wheeled robot chassis driven by an Espressif ESP32-S3 module connected to two or four motors with encoders and powered by a low-cost USB power bank. Its base configuration is designed for simplicity and affordability, but it's easily extendible: there's support for Mecanum wheeles, OLED "eyes, " and sensors including inertial measurement units (IMUs), time-of-flight (ToF) distance sensors, and LIDAR modules, along with a MikroBUS socket and a Qwiic socket for more. Support for custom add-on daughterboards, with proposed expansions including an ESP32-S3 camera module
The hardware is designed to be programmed in two ways, with more to follow. For beginners, there's support for the MicroBlocks block-based visual coding environment, which is currently working but awaiting motor encoder configuration.
The platform also supports a fork of the Linorobot2 firmware, providing compatibility with the Robot Operating System 2 (ROS 2).
See project website for more >



{kind=link}
Comments
Please log in or sign up to comment.