


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
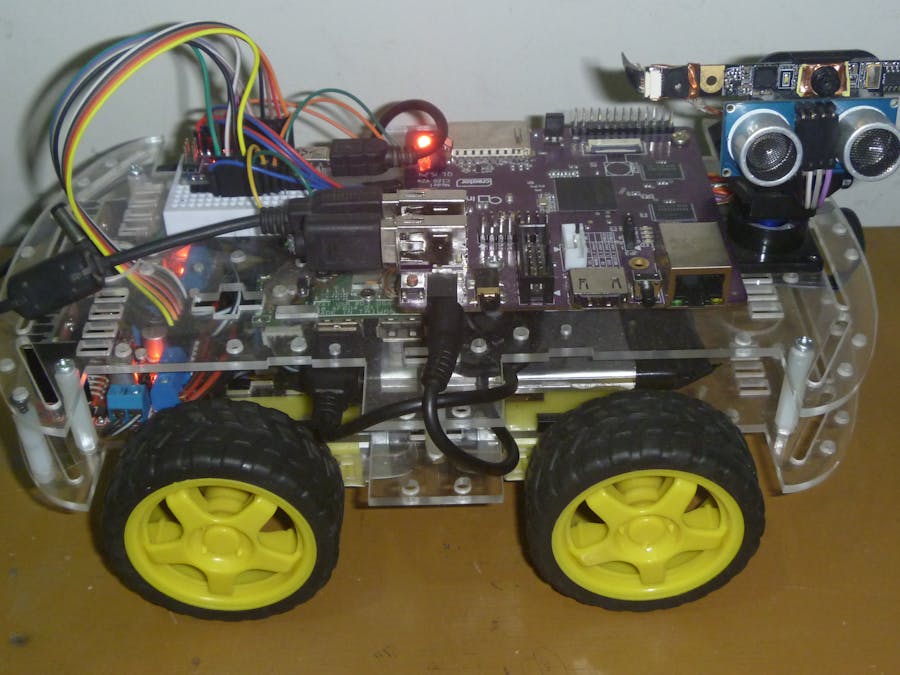
It is a car that tracks your face, if I'm away he comes!
You need to have installed this (Ci20):
- Opencv
- Python
- Serial port fix permissions
I used the distro Debian 8 install & download
I used:
- Old laptop camera (recycled)
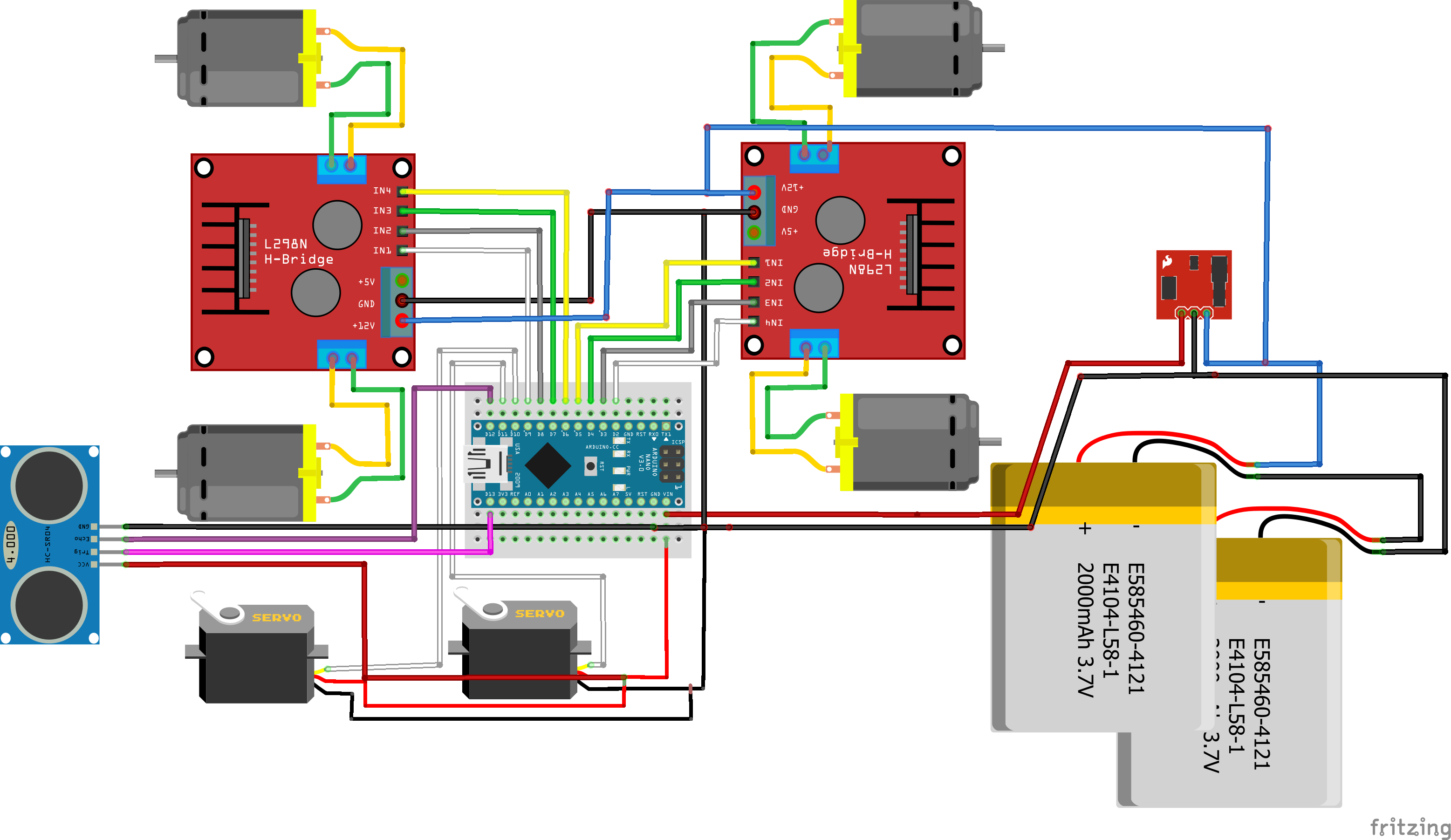
- Ultrasonic ranging module HC - SR04
- x2 Battery 3.7v 4000mah (recycled old laptop)
- x2 Servo
- DC-DC converter
- Arduino nano
- Robot base kit
- x2 L298d
For installation use the following commands in the terminal.
To update linux.
sudo apt-get update # Fetches the list of available updates
sudo apt-get upgrade # Strictly upgrades the current packages
sudo apt-get dist-upgrade # Installs updates (new ones)
OpenCV. It is the version 2.4.9.1 is not up to date, but it works fine.
sudo apt-get install libopencv-dev python-opencv
If you want to compile OpenCV from the source , I found this tutorial.
Install PySerial.
sudo apt-get install python python-serial
We change the serial port permissions, if you used the USB or a native.
sudo chown ci20:ci20 /dev/ttyUSB0 #Serial port USB from Arduino
sudo chown ci20:ci20 /dev/ttyS1 #Serial port native in Ci20
Runs the python script (changes the zero if you have more than one video source, this selects the source).
sudo python facetrackingcar.py 0
To improve performance slightly, the image captured is not displayed if you want to see, you must search and uncomment this lines.
#cv.ShowImage("result", img)
#cv.NamedWindow("result", 1)
#cv.DestroyWindow("result")
You need to have the haarcascade_frontalface_alt.xml file in the same directory as the scrip.
Video for only tracking camera in Windows
Demo video on Ci20
Feedback and improvements are welcome.
#!/usr/bin/python
"""
This program is demonstration for face and object detection using haar-like features.
The program finds faces in a camera image or video stream and displays a red box around them,
then centers the webcam via two servos so the face is at the center of the screen
Based on facedetect.py in the OpenCV samples directory
"""
import sys
from optparse import OptionParser
import serial
import cv2.cv as cv
import time
# Parameters for haar detection
# From the API:
# The default parameters (scale_factor=2, min_neighbors=3, flags=0) are tuned
# for accurate yet slow object detection. For a faster operation on real video
# images the settings are:
# scale_factor=1.2, min_neighbors=2, flags=CV_HAAR_DO_CANNY_PRUNING,
# min_size=<minimum possible face size
min_size = (20, 20)
image_scale = 2
haar_scale = 1.2
min_neighbors = 2
haar_flags = cv.CV_HAAR_DO_CANNY_PRUNING
max_pwm = 180
min_pwm = 1
midScreenWindow = 20 # acceptable 'error' for the center of the screen.
panStepSize = 1 # degree of change for each pan update
tiltStepSize = 1 # degree of change for each tilt update
servoPanPosition = 90 # initial pan position x
servoTiltPosition = 45 # initial tilt position y
panGpioPin = 2 # arduino pan servo ID (NOT pin number)
tiltGpioPin = 1 # arduino tilt servo ID (NOT pin number)
var =0;
def detect_and_draw(img, cascade):
gray = cv.CreateImage((img.width,img.height), 8, 1)
small_img = cv.CreateImage((cv.Round(img.width / image_scale),
cv.Round (img.height / image_scale)), 8, 1)
# convert color input image to grayscale
cv.CvtColor(img, gray, cv.CV_BGR2GRAY)
# scale input image for faster processing
cv.Resize(gray, small_img, cv.CV_INTER_LINEAR)
cv.EqualizeHist(small_img, small_img)
midFace = None
if(cascade):
t = cv.GetTickCount()
# HaarDetectObjects takes 0.02s
faces = cv.HaarDetectObjects(small_img, cascade, cv.CreateMemStorage(0),
haar_scale, min_neighbors, haar_flags, min_size)
t = cv.GetTickCount() - t
if faces:
for ((x, y, w, h), n) in faces:
# the input to cv.HaarDetectObjects was resized, so scale the
# bounding box of each face and convert it to two CvPoints
pt1 = (int(x * image_scale), int(y * image_scale))
pt2 = (int((x + w) * image_scale), int((y + h) * image_scale))
cv.Rectangle(img, pt1, pt2, cv.RGB(255, 0, 0), 3, 8, 0)
# get the xy corner co-ords, calc the midFace location
x1 = pt1[0]
x2 = pt2[0]
y1 = pt1[1]
y2 = pt2[1]
midFaceX = x1+((x2-x1)/2)
midFaceY = y1+((y2-y1)/2)
midFace = (midFaceX, midFaceY)
#cv.ShowImage("result", img)
return midFace
def move(servo, angle):
'''Moves the specified servo to the supplied angle.
Arguments:
servo
the servo number to command, an integer from 1-4
angle
the desired servo angle, an integer from 0 to 180
(e.g.) >>> servo.move(2, 90)
... # "move servo #2 to 90 degrees"'''
if (min_pwm <= angle <= max_pwm):
ser.write(chr(255))
ser.write(chr(servo))
ser.write(chr(angle))
else:
print "Servo angle must be an integer between 0 and 180.\n"
if __name__ == '__main__':
ser=serial.Serial(port='/dev/ttyUSB0',baudrate=115200,timeout=1)
#ser=serial.Serial(port='/dev/ttyS0',baudrate=115200,timeout=1)
#ser=serial.Serial(port='COM14',baudrate=115200,timeout=1)
# parse cmd line options, setup Haar classifier
parser = OptionParser(usage = "usage: %prog [options] [camera_index]")
parser.add_option("-c", "--cascade", action="store", dest="cascade", type="str", help="Haar cascade file, default %default", default = "./haarcascade_frontalface_alt.xml")
(options, args) = parser.parse_args()
cascade = cv.Load(options.cascade)
if len(args) != 1:
parser.print_help()
sys.exit(1)
input_name = args[0]
if input_name.isdigit():
capture = cv.CreateCameraCapture(int(input_name))
cv.SetCaptureProperty(capture, cv.CV_CAP_PROP_FRAME_WIDTH, 320)
cv.SetCaptureProperty(capture, cv.CV_CAP_PROP_FRAME_HEIGHT, 240)
else:
print "We need a camera input! Specify camera index e.g. 0"
sys.exit(0)
# cv.NamedWindow("result", 1)
if capture:
frame_copy = None
move(panGpioPin, servoPanPosition)
move(tiltGpioPin, servoTiltPosition)
while True:
start = time.time()
frame = cv.QueryFrame(capture)
if not frame:
cv.WaitKey(0)
break
if not frame_copy:
frame_copy = cv.CreateImage((frame.width,frame.height),
cv.IPL_DEPTH_8U, frame.nChannels)
if frame.origin == cv.IPL_ORIGIN_TL:
cv.Copy(frame, frame_copy)
else:
cv.Flip(frame, frame_copy, 0)
midScreenX = (frame.width/2)
midScreenY = (frame.height/2)
midFace = detect_and_draw(frame_copy, cascade)
if midFace is not None:
midFaceX = midFace[0]
midFaceY = midFace[1]
#Find out if the X component of the face is to the left of the middle of the screen.
if(midFaceX < (midScreenX - midScreenWindow)):
#Update the pan position variable to move the servo to the right.
servoPanPosition += panStepSize
print str(midFaceX) + " > " + str(midScreenX) + " : Pan Right : " + str(servoPanPosition)
#Find out if the X component of the face is to the right of the middle of the screen.
elif(midFaceX > (midScreenX + midScreenWindow)):
#Update the pan position variable to move the servo to the left.
servoPanPosition -= panStepSize
print str(midFaceX) + " < " + str(midScreenX) + " : Pan Left : " + str(servoPanPosition)
else:
print str(midFaceX) + " ~ " + str(midScreenX) + " : " + str(servoPanPosition)
servoPanPosition = min(servoPanPosition, max_pwm)
servoPanPosition = max(servoPanPosition, min_pwm)
move(panGpioPin, servoPanPosition)
#Find out if the Y component of the face is below the middle of the screen.
if(midFaceY < (midScreenY - midScreenWindow)):
if(servoTiltPosition <= 90):
#Update the tilt position variable to lower the tilt servo.
servoTiltPosition -= tiltStepSize
print str(midFaceY) + " > " + str(midScreenY) + " : Tilt Down : " + str(servoTiltPosition)
#Find out if the Y component of the face is above the middle of the screen.
elif(midFaceY > (midScreenY + midScreenWindow)):
if(servoTiltPosition >= 1):
#Update the tilt position variable to raise the tilt servo.
servoTiltPosition += tiltStepSize
print str(midFaceY) + " < " + str(midScreenY) + " : Tilt Up : " + str(servoTiltPosition)
start = 1;
end = 1;
else:
print str(midFaceY) + " ~ " + str(midScreenY) + " : " + str(servoTiltPosition)
servoTiltPosition = min(servoTiltPosition, max_pwm)
servoTiltPosition = max(servoTiltPosition, min_pwm)
move(tiltGpioPin, servoTiltPosition)
else:
# end measuring time
end = time.time()+0.1
var += 0.1
# getting elapsed time
time_elapsed = int(end - start + var)
# printing information
print 'time elapsed:\t{}'.format(time_elapsed)
print 'var:\t{}'.format(var)
if time_elapsed == 20:
move(3, servoTiltPosition)
servoPanPosition = 90
servoTiltPosition = 45
var=0;
if cv.WaitKey(1) >= 0: # 1ms delay
break
#cv.DestroyWindow("result")
#include <Servo.h>
#define MA_1 2
#define MA_2 3
#define MB_1 4
#define MB_2 5
#define MC_1 6
#define MC_2 7
#define MD_1 8
#define MD_2 9
#define SERVOX_PIN 11
#define SERVOY_PIN 10
#define trigPin 13
#define echoPin 12
// User input for servo and position
Servo servoy;
Servo servox;
int x = 90, prevX;
int y = 45, prevY;
int userInput[3]; // raw input from serial buffer, 3 bytes
int startbyte; // start byte, begin reading input
int servo; // which servo to pulse?
int pos; // servo angle 0-180
int i; // iterator
int State = LOW;
unsigned long previousMillis = 0 , val = 100;;
const long interval = 100;
bool scana = false;
unsigned long currentMillis;
void setup() {
inicializate();
currentMillis = millis();
}
void loop() {
// Wait for serial input (min 3 bytes in buffer)
if (Serial.available() > 2) {
// Read the first byte
startbyte = Serial.read();
// If it's really the startbyte (255) ...
if (startbyte == 255) {
// ... then get the next two bytes
for (i = 0; i < 2; i++) {
userInput[i] = Serial.read();
}
// First byte = servo to move?
servo = userInput[0];
// Second byte = which position?
pos = userInput[1];
// Packet error checking and recovery
if (pos == 255) {
servo = 255;
}
// Assign new position to appropriate servo
switch (servo) {
case 1:
servoy.write(pos); // move servo1 to 'pos'
break;
case 2:
servox.write(pos);
range(pos);
break;
case 3:
scan(45);
scan(65);
break;
default:
break;
}
}
}
}
void scan(int val) {
while (Serial.available() == 0) {
servoy.write(val);
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis;
servox.write(pos);
if (State == LOW ) {
pos += 1;
if (pos == 130) {
State = HIGH;
}
}
else {
pos -= 1;
if (pos == 40) {
State = LOW;
break;
}
}
}
}
}
long distancia() {
long duration, distance;
digitalWrite(trigPin, LOW); // Added this line
delayMicroseconds(2); // Added this line
digitalWrite(trigPin, HIGH);
delayMicroseconds(10); // Added this line
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration / 2) / 29.1;
return distance;
}
void range(int pos) {
if ((pos >= 80 ) & (pos <= 100)) {
moves();
}
else if ((pos >= 100 ) & (pos <= 180)) {
left();
delay(10);
Stop();
}
else if ((pos >= 1 ) & (pos <= 80)) {
right();
delay(10);
Stop();
}
}
void moves() {
long distance, previusdistance;
distance = distancia();
if (val <= 80) {
reverse();
delay(50);
Stop();
}
else if (val >= 140) {
forward();
delay(50);
Stop();
}
if (distance >= previusdistance) {
val = (distance - previusdistance);
}
else if (distance <= previusdistance) {
val = (previusdistance - distance);
}
previusdistance = distance;
}
void inicializate() {
Serial.begin(115200);
pinMode(MA_1, OUTPUT);
pinMode(MA_2, OUTPUT);
pinMode(MB_1, OUTPUT);
pinMode(MB_2, OUTPUT);
pinMode(MC_1, OUTPUT);
pinMode(MC_2, OUTPUT);
pinMode(MD_1, OUTPUT);
pinMode(MD_2, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
servox.attach(SERVOX_PIN);
servoy.attach(SERVOY_PIN);
}
void forward() {
digitalWrite(MA_1, HIGH);
digitalWrite(MA_2, LOW);
digitalWrite(MB_1, HIGH);
digitalWrite(MB_2, LOW);
digitalWrite(MC_1, HIGH);
digitalWrite(MC_2, LOW);
digitalWrite(MD_1, HIGH);
digitalWrite(MD_2, LOW);
}
void reverse () {
digitalWrite(MA_1, LOW);
digitalWrite(MA_2, HIGH);
digitalWrite(MB_1, LOW);
digitalWrite(MB_2, HIGH);
digitalWrite(MC_1, LOW);
digitalWrite(MC_2, HIGH);
digitalWrite(MD_1, LOW);
digitalWrite(MD_2, HIGH);
}
void right() {
digitalWrite(MA_1, LOW);
digitalWrite(MA_2, HIGH);
digitalWrite(MB_1, LOW);
digitalWrite(MB_2, HIGH);
digitalWrite(MC_1, HIGH);
digitalWrite(MC_2, LOW);
digitalWrite(MD_1, HIGH);
digitalWrite(MD_2, LOW);
}
void left() {
digitalWrite(MA_1, HIGH);
digitalWrite(MA_2, LOW);
digitalWrite(MB_1, HIGH);
digitalWrite(MB_2, LOW);
digitalWrite(MC_1, LOW);
digitalWrite(MC_2, HIGH);
digitalWrite(MD_1, LOW);
digitalWrite(MD_2, HIGH);
}
void Stop() {
digitalWrite(MA_1, LOW);
digitalWrite(MA_2, LOW);
digitalWrite(MB_1, LOW);
digitalWrite(MB_2, LOW);
digitalWrite(MC_1, LOW);
digitalWrite(MC_2, LOW);
digitalWrite(MD_1, LOW);
digitalWrite(MD_2, LOW);
}
void StopH() {
digitalWrite(MA_1, HIGH);
digitalWrite(MA_2, HIGH);
digitalWrite(MB_1, HIGH);
digitalWrite(MB_2, HIGH);
digitalWrite(MC_1, HIGH);
digitalWrite(MC_2, HIGH);
digitalWrite(MD_1, HIGH);
digitalWrite(MD_2, HIGH);
}
#! /usr/bin/env python
"""\
Scan for serial ports. Linux specific variant that also includes USB/Serial
adapters.
Part of pySerial (http://pyserial.sf.net)
(C) 2009 <cliechti@gmx.net>
"""
import serial
import glob
def scan():
"""scan for available ports. return a list of device names.
pvergain@houx:~/PDEV1V160_CodesRousseau/Soft/PC/test_boost/serialport/pyserial$ python scanlinux.py
Found ports:
/dev/ttyS0
/dev/ttyS3
/dev/ttyS2
/dev/ttyS1
/dev/ttyACM0
/dev/serial/by-id/usb-id3_semiconductors_MEABOARD_00000000-if00
"""
return glob.glob('/dev/ttyS*') + glob.glob('/dev/ttyUSB*') + glob.glob('/dev/ttyACM*') + glob.glob('/dev/serial/by-id/*')
if __name__=='__main__':
print "Found ports:"
for name in scan():
print name






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.