


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 2 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
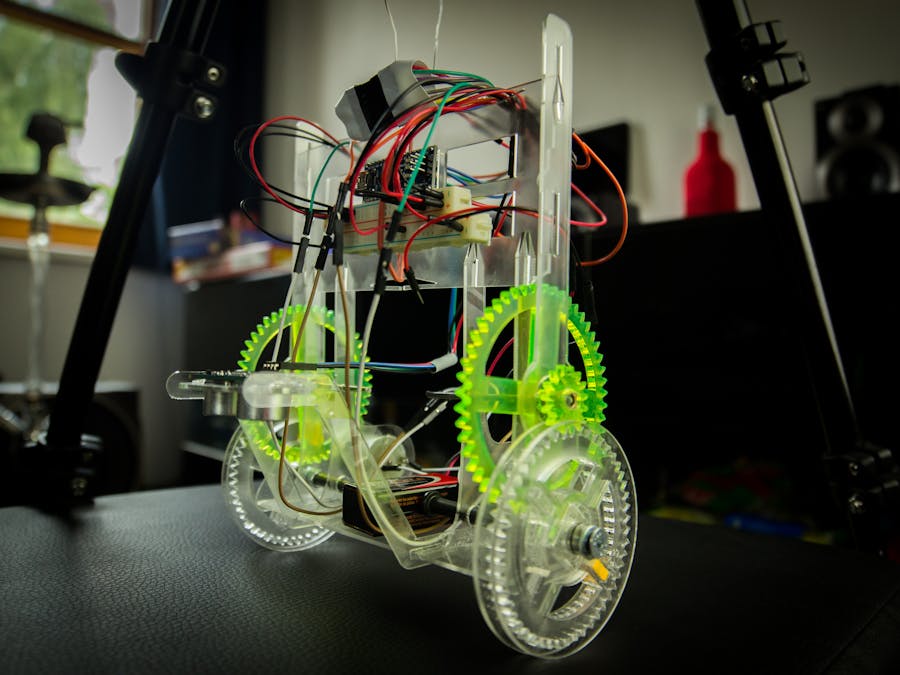
This was a project that I created for a class in Human Computer Interaction - Computer Vision at the HPI.
The task was to create an autonomous moving vehicle that finds the center of a projected light source, built exclusively from laser-cut parts and some given electronics.
sketches for the last iteration
I decided to create a self balancing robot because it's more agile and for the extra challenge that comes with it. It took a lot of iterations before I had a working prototype, especially because of gears and weight optimisations.
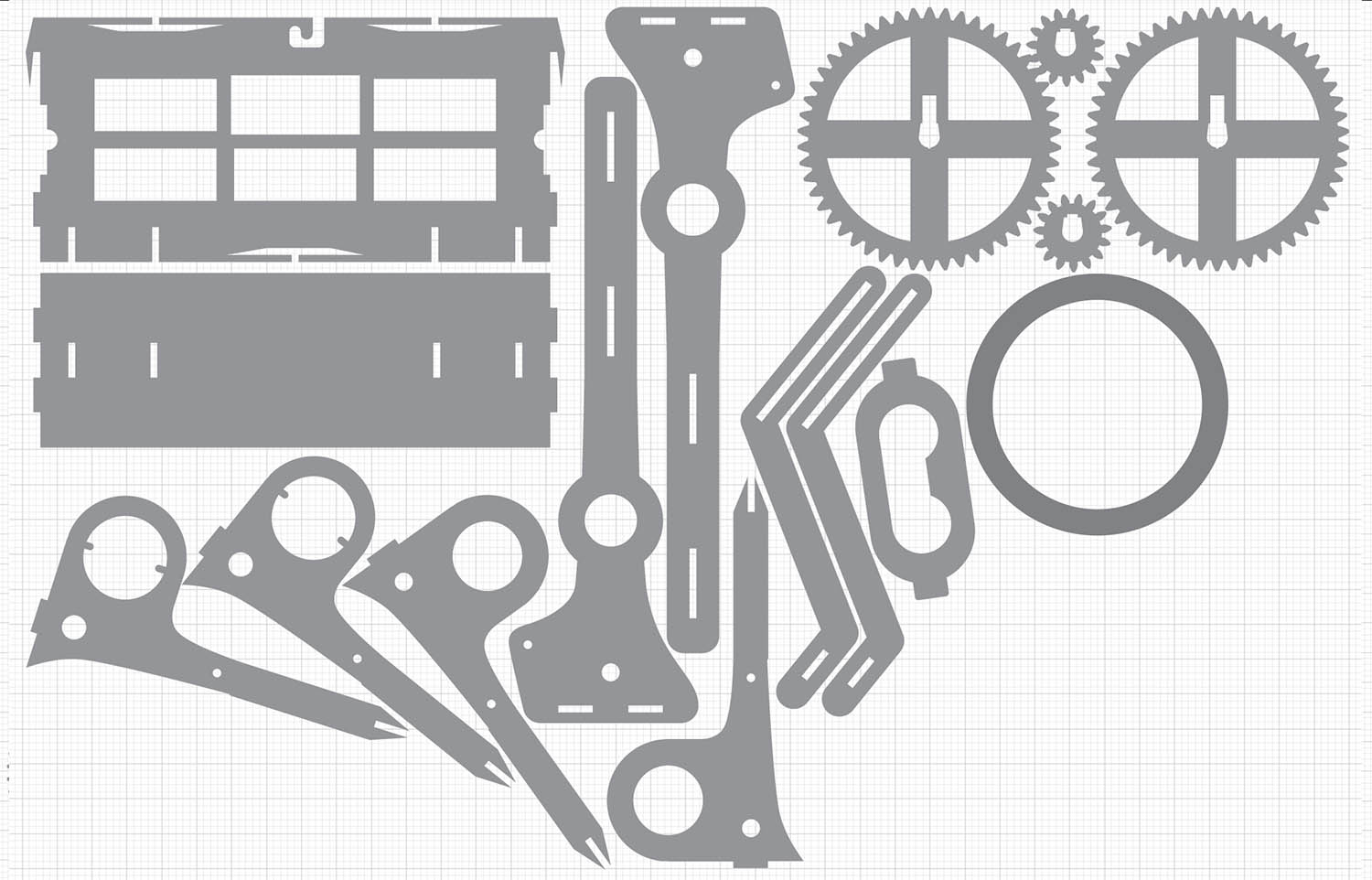
laser-cut parts for the first iteration
You can find some more impressions in the picture gallery.
We actually had a competition for all the projects that people created for this class, you can have a look at the different approaches in this short video.
Wiring schematic
File missing, please reupload.
#include <NewPing.h>
int internalLedPin = 13;
int externalLedPin = 12;
int potentiometerPin = A0;
int dc1EnablePin = 4;
int dc1Pin = 10;
int dc1ReversePin = 9;
int dc2EnablePin = 3;
int dc2Pin = 6;
int dc2ReversePin = 5;
int distanceTriggerPin = 8;
int distanceEchoPin = 7;
int maximumDistance = 5000;
int balancedDistanceOriginal = -1;
int balancedDistance = -1;
const int measuredDistancesCount = 10;
int measuredDistances[measuredDistancesCount];
int potentiometerValue = 512;
unsigned long timerLogLast = 0;
int timerLogDelta = 200;
unsigned long timerDistanceLast = 0;
int timerDistanceDelta = 10;
unsigned long timerDebugLast = 0;
int timerDebugDelta = 3000;
bool isTurningCW = true;
// magic numbers for power calculation
const float powerFactor0 = 0;
const float powerFactor2 = 0.00005;
NewPing sonar(distanceTriggerPin, distanceEchoPin, maximumDistance);
void setup() {
digitalWrite(internalLedPin, HIGH);
//pinMode(externalLedPin, OUTPUT);
pinMode(dc1EnablePin, OUTPUT);
pinMode(dc1Pin, OUTPUT);
pinMode(dc1ReversePin, OUTPUT);
pinMode(dc2EnablePin, OUTPUT);
pinMode(dc2Pin, OUTPUT);
pinMode(dc2ReversePin, OUTPUT);
pinMode(distanceTriggerPin, OUTPUT);
pinMode(distanceEchoPin, INPUT);
Serial.begin(9600);
}
void loop() {
unsigned long timerNow = millis();
// check sonar value
if (timerNow > timerDistanceLast + timerDistanceDelta) {
sonar.ping_timer(sonarCallback);
timerDistanceLast = timerNow;
// balance
double stableDistance = getAverageDistance(3);
if (stableDistance > balancedDistance + 1) {
//powerBothWheels(255);
} else if (stableDistance < balancedDistance - 1) {
//powerBothWheels(-255);
}
}
// debug
if (timerNow > timerDebugLast + timerDebugDelta) {
// change direction
if (isTurningCW) {
//powerBothWheels(-255);
} else {
//powerBothWheels(255);
}
isTurningCW = !isTurningCW;
Serial.println("Changing direction");
int powerValue = digitalToAnalog(potentiometerValue);
timerDebugLast = timerNow;
}
// log misc. stuff
if (timerNow > timerLogLast + timerLogDelta) {
// update potentiometer value
//potentiometerValue = analogRead(potentiometerPin);
potentiometerValue = 512;
balancedDistance = balancedDistanceOriginal + (map(potentiometerValue - 512, 0, 512, 0, 10));
Serial.print("Last distances: ");
Serial.print(getMeasuredDistancesAsString());
Serial.print(" Average distance: ");
Serial.print(getAverageDistance(10));
Serial.print(" Last power value: ");
Serial.println(calculatePowerValue());
timerLogLast = timerNow;
}
}
void sonarCallback() {
if (sonar.check_timer()) {
int currentMeasuredDistance = (sonar.ping_result / 24);
// shift all elemts of the array by -1
for (char i = 0; i < measuredDistancesCount - 1; i++) {
measuredDistances[i] = measuredDistances[i + 1];
}
// store the new distance at the end of the array
measuredDistances[measuredDistancesCount - 1] = currentMeasuredDistance;
// if no balanced distance has been set, use the current one
if (balancedDistanceOriginal < 0) {
balancedDistanceOriginal = currentMeasuredDistance;
balancedDistance = balancedDistanceOriginal;
}
// let LED indicate if balanced or not
int deltaFromBalanced = currentMeasuredDistance - balancedDistance;
if (deltaFromBalanced <= 1 && deltaFromBalanced >= -1) {
digitalWrite(internalLedPin, HIGH);
} else {
digitalWrite(internalLedPin, LOW);
}
int powerValue = calculatePowerValue();
powerBothWheels(powerValue);
} else {
// invalid distance measured
}
}
int calculatePowerValue() {
int powerValue = 0;
double lastMeasuredDistance = measuredDistances[measuredDistancesCount - 1];
//double lastMeasuredDistance = getAverageDistance(5);
double deltaFromBalanced = lastMeasuredDistance - balancedDistance;
// modify power value using pedometer (centered pedometer --> factor = 1)
//double factor = map(potentiometerValue, 0, 1023, 0, 200) / (double) 100;
double factor = 1;
if (lastMeasuredDistance - balancedDistance < 0) {
deltaFromBalanced = deltaFromBalanced * (-1);
}
// powerValue is this formular solved for x:
// deltaFromBalanced = powerFactor2 * x^2 + powerFactor1 * x + powerFactor0
powerValue = factor * sqrt((deltaFromBalanced - powerFactor0) / powerFactor2);
if (powerValue == 0) {
double stableDistance = getAverageDistance(5);
double stableDistanceDelta = stableDistance - balancedDistance;
powerValue = 0.5 * sqrt((stableDistanceDelta) / powerFactor2);
if (stableDistanceDelta > 0) {
powerValue = powerValue * (-1);
}
} else {
if (deltaFromBalanced < 0) {
powerValue = powerValue * (-1);
}
}
powerValue = min(255, powerValue);
powerValue = max(-255, powerValue);
if (lastMeasuredDistance - balancedDistance > 0) {
powerValue = powerValue * (-1);
}
return powerValue;
}
double getAverageDistance(int count) {
if (count > 10) {
count = 10;
}
double average = 0;
for (char i = measuredDistancesCount - 1; i >= 0 && i + count >= measuredDistancesCount; i--) {
average += measuredDistances[i];
}
average = average / count;
return average;
}
String getMeasuredDistancesAsString() {
String distanceArray = "[";
for (char i = 0; i < measuredDistancesCount; i++) {
distanceArray = distanceArray + " " + measuredDistances[i] + " ";
}
distanceArray = distanceArray + "]";
return distanceArray;
}
void powerBothWheels(int value) {
powerLeftWheel(value);
powerRightWheel(value);
}
// Left wheel
void powerLeftWheel(int value) {
if (value > 0) {
powerLeftWheelForwards(value);
} else if (value < 0) {
powerLeftWheelBackwards(value * (-1));
} else {
stopLeftWheel();
}
}
void powerLeftWheelForwards(int value) {
digitalWrite(dc1EnablePin, HIGH);
analogWrite(dc1Pin, value);
analogWrite(dc1ReversePin, 0);
}
void powerLeftWheelBackwards(int value) {
digitalWrite(dc1EnablePin, HIGH);
analogWrite(dc1Pin, 0);
analogWrite(dc1ReversePin, value);
}
void stopLeftWheel() {
digitalWrite(dc1EnablePin, LOW);
analogWrite(dc1Pin, 0);
analogWrite(dc1ReversePin, 0);
}
// Right wheel
void powerRightWheel(int value) {
if (value > 0) {
powerRightWheelForwards(value);
} else if (value < 0) {
powerRightWheelBackwards(value * (-1));
} else {
stopRightWheel();
}
}
void powerRightWheelForwards(int value) {
digitalWrite(dc2EnablePin, HIGH);
analogWrite(dc2Pin, value);
analogWrite(dc2ReversePin, 0);
}
void powerRightWheelBackwards(int value) {
digitalWrite(dc2EnablePin, HIGH);
analogWrite(dc2Pin, 0);
analogWrite(dc2ReversePin, value);
}
void stopRightWheel() {
digitalWrite(dc2EnablePin, LOW);
analogWrite(dc2Pin, 0);
analogWrite(dc2ReversePin, 0);
}
int digitalToAnalog(int digitalValue) {
return digitalValue / 4;
}




{kind=link}
Comments
Please log in or sign up to comment.