// it is pretty inefficient, but gets the job done, I challenge you to make it more efficient!
//*IMPORTANT CHANGES IN VERSION 2: LEDs 4 and 5 have been moved to pins 7 and 8 respectively; Buttons 1 and 2 have been moved to pins 12 and 13 respectively. This is to make wiring easier.
#include <Servo.h>
Servo servo1; //Servos
Servo servo2;
Servo servo3;
const int LED1 = 2; //LEDs
const int LED2 = 3;
const int LED3 = 4;
const int LED4 = 7;
const int LED5 = 8;
const int button1 = 12; //Buttons
const int button2 = 13;
int button1Presses = 0; //Button values
boolean button2Pressed = false;
const int pot1 = A0; //Potentimeters
const int pot2 = A1;
const int pot3 = A2;
int pot1Val; //Potentimeter values
int pot2Val;
int pot3Val;
int pot1Angle;
int pot2Angle;
int pot3Angle;
int servo1PosSaves[] = {1,1,1,1,1}; //position saves
int servo2PosSaves[] = {1,1,1,1,1};
int servo3PosSaves[] = {1,1,1,1,1};
void setup() {
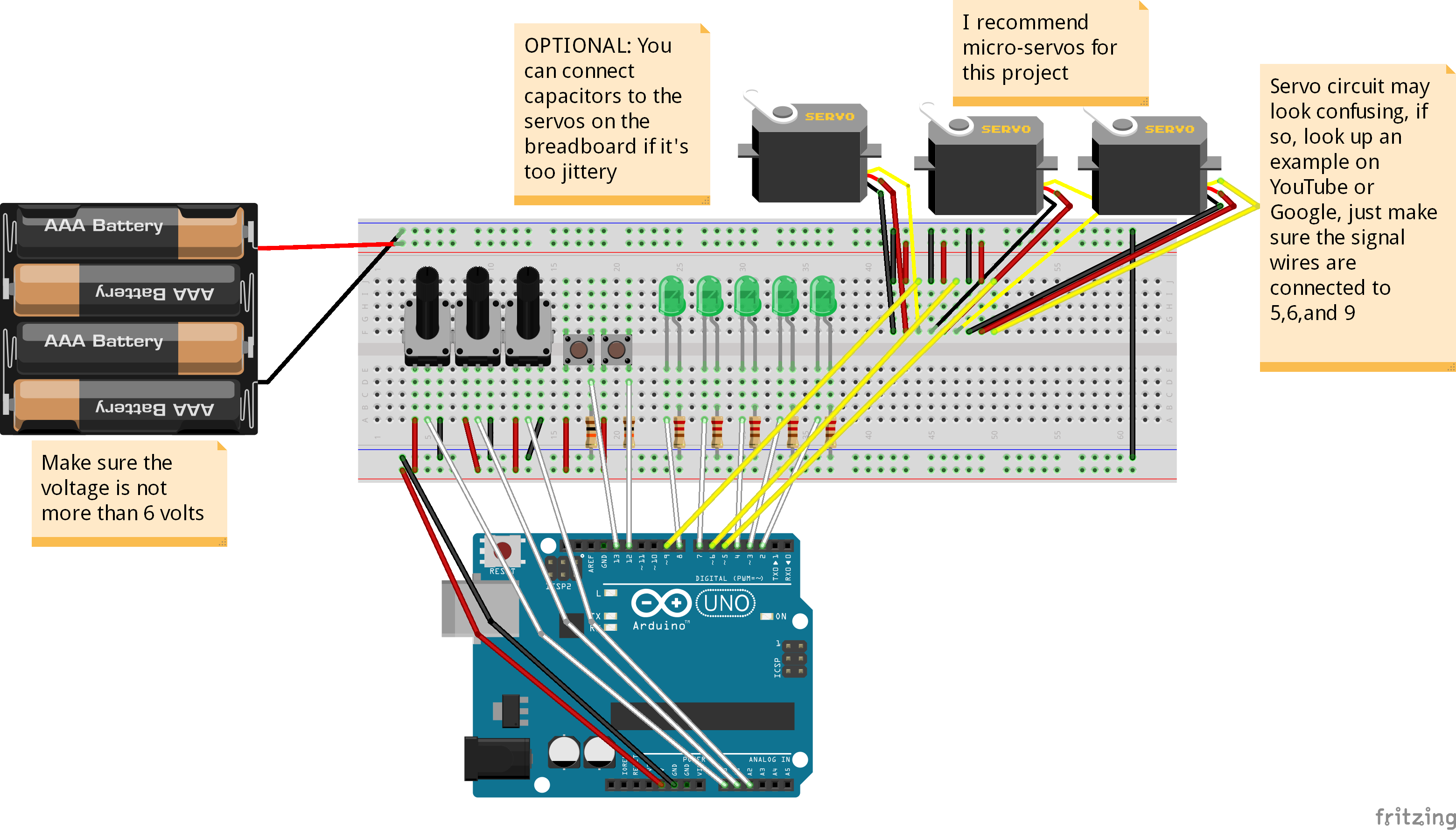
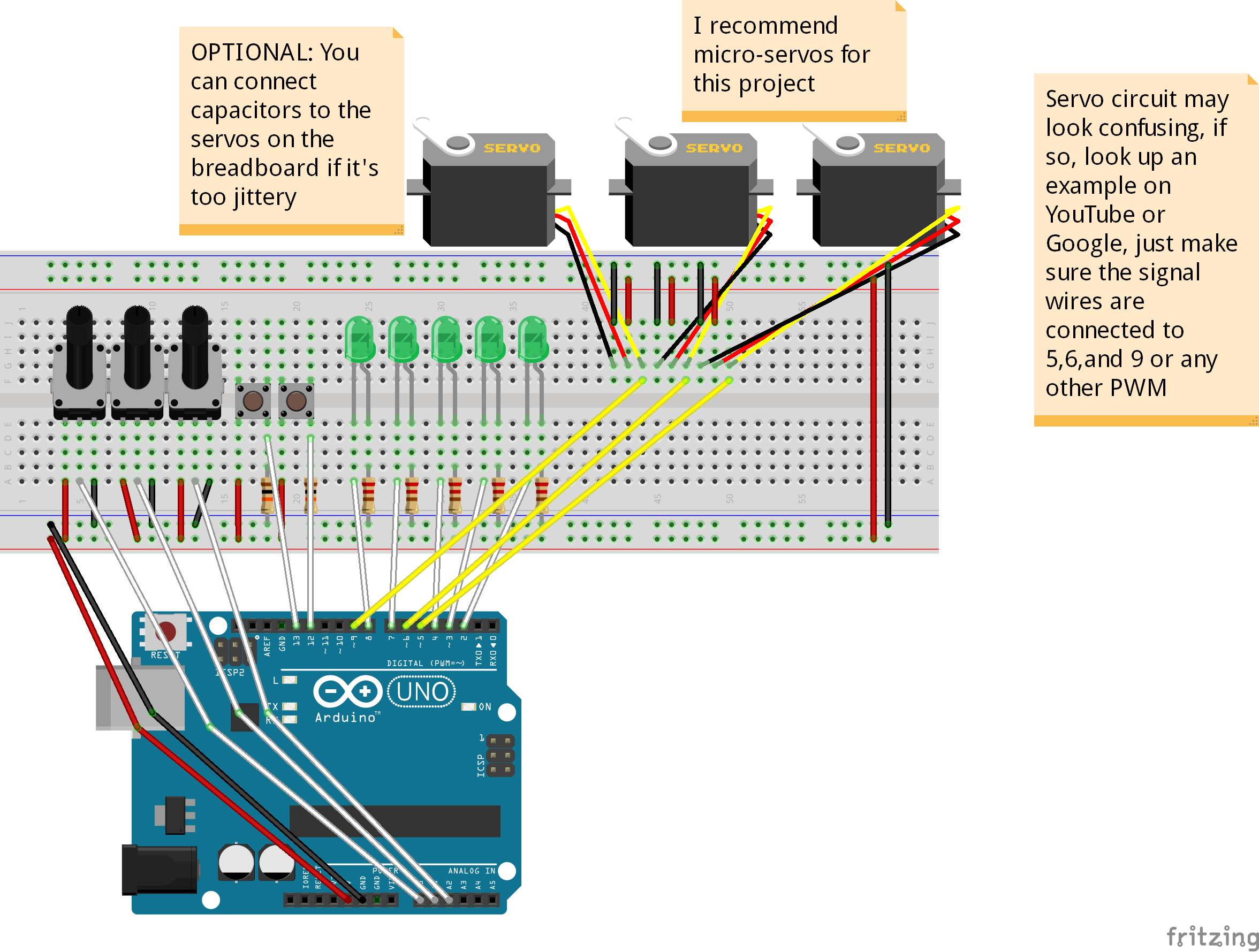
servo1.attach(5); // Set up everything and will run once; attach servos and define the pin modes
servo2.attach(6);
servo3.attach(9);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED5, OUTPUT);
pinMode(button1, INPUT);
pinMode(button2, INPUT);
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
pot1Val = analogRead(pot1); // This will read the values from the potentimeters and store it...
pot1Angle = map(pot1Val, 0, 1023, 0, 179); // ... and this will map the values from the potentiometers to values the servos can use and store it for later use
pot2Val = analogRead(pot2);
pot2Angle = map(pot2Val, 0, 1023, 0, 179);
pot3Val = analogRead(pot3);
pot3Angle = map(pot3Val, 0, 1023, 0, 179);
servo1.write(pot1Angle); // These will make the servos move to the mapped angles
servo2.write(pot2Angle);
servo3.write(pot3Angle);
if(digitalRead(button1) == HIGH){ // This will check how many times button1 is pressed and save the positions to an array depending on how many times it is pressed; switch/case works like a if statement
button1Presses++;
switch(button1Presses){
case 1:
servo1PosSaves[0] = pot1Angle;
servo2PosSaves[0] = pot2Angle;
servo3PosSaves[0] = pot3Angle;
digitalWrite(LED1, HIGH);
Serial.println("Pos 1 Saved");
break;
case 2:
servo1PosSaves[1] = pot1Angle;
servo2PosSaves[1] = pot2Angle;
servo3PosSaves[1] = pot3Angle;
digitalWrite(LED2, HIGH);
Serial.println("Pos 2 Saved");
break;
case 3:
servo1PosSaves[2] = pot1Angle;
servo2PosSaves[2] = pot2Angle;
servo3PosSaves[2] = pot3Angle;
digitalWrite(LED3, HIGH);
Serial.println("Pos 3 Saved");
break;
case 4:
servo1PosSaves[3] = pot1Angle;
servo2PosSaves[3] = pot2Angle;
servo3PosSaves[3] = pot3Angle;
digitalWrite(LED4, HIGH);
Serial.println("Pos 4 Saved");
break;
case 5:
servo1PosSaves[4] = pot1Angle;
servo2PosSaves[4] = pot2Angle;
servo3PosSaves[4] = pot3Angle;
digitalWrite(LED5, HIGH);
Serial.println("Pos 5 Saved");
break;
}
}
if(digitalRead(button2) == HIGH){ // Pretty self-explnatory here
button2Pressed = true;
}
if(button2Pressed){ // if the boolean button2Press is true, then the servos will run though all their saved positions
for(int i = 0; i < 5; i++){
servo1.write(servo1PosSaves[i]);
servo2.write(servo2PosSaves[i]);
servo3.write(servo3PosSaves[i]);
Serial.println(" potentimeter Angles: ");
Serial.println(servo1PosSaves[i]);
Serial.println(servo2PosSaves[i]);
Serial.println(servo3PosSaves[i]);
delay(1050);
}
}
delay(300);
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




{kind=link}
{kind=link}

Comments
Please log in or sign up to comment.