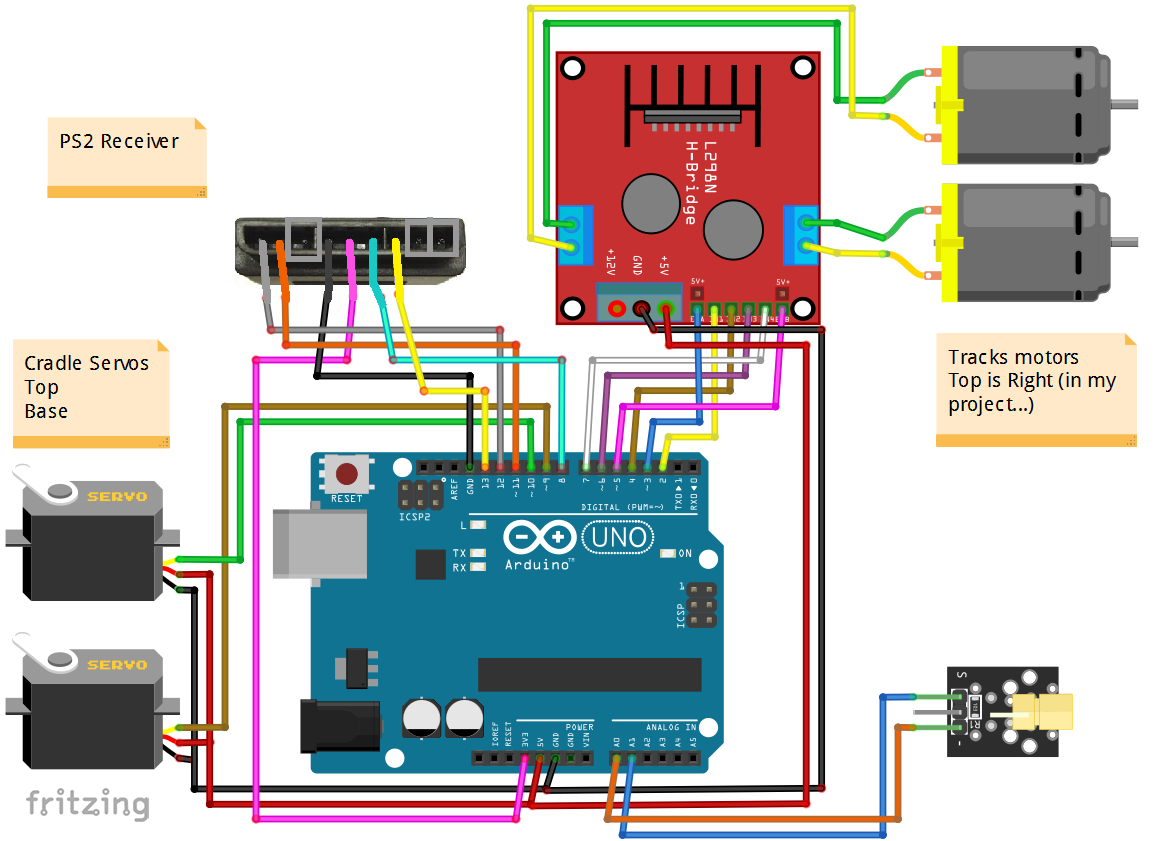
/* This code is for RC LASER tank / Self propelled LASER Turret
* Refer to www.SurtrTech.com or SurtrTech YouTube channel for more details
*/
#include <PS2X_lib.h> //Libraries needed PS2 Receiver and Servo
#include <Servo.h>
Servo Servo1; //Declaring cradle servos, Servo1 is the base
Servo Servo2;
PS2X ps2x; //Declaring the PS2X controller
int error = 0; //PS2X stuff to detect errors and type of controller
byte type = 0;
byte vibrate = 0; //vibration of the controller
int a,b;
//Motor A Right motor for my project
int in1 = 2;
int in2 = 4;
int EnA = 3; //I'm controlling the speed also
//Motor B
int in3 = 6;
int in4 = 7;
int EnB = 5;
void setup(){
Serial.begin(9600); //Serial monitor will help you to see values and know if your controls are detected or not
error = ps2x.config_gamepad(13,11,8,12, true, true); //setup pins and settings: GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error
type = ps2x.readType();
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(EnA, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(EnB, OUTPUT);
pinMode(A0,OUTPUT); //Those lines concern the LASER, I ran out of pins and I put A0 as GND
pinMode(A1,OUTPUT); //And the A1 provides 5v if I press the X button
digitalWrite(A0,LOW);
Servo1.attach(9);
Servo2.attach(10);
}
void loop(){
a=Servo1.read(); //Reading the previous servos positions is an important step so we can know where they should position next
b=Servo2.read();
ps2x.read_gamepad(false, vibrate); //read controller and set large motor to spin at 'vibrate' speed
vibrate = ps2x.Analog(PSAB_BLUE); //this will set the large motor vibrate speed based on
digitalWrite(A1,vibrate); //if the vibrate takes a value > threshold it will set the A1 (LASER) to high
Stop(); //As long as no stick is pushed we stop, otherwise move accordingly
//Forward sequence
if(255-ps2x.Analog(PSS_LY) > 130){ //This is how I detect that the stick is pushed up the value gotten should be 130-255
Serial.println("Forward"); //And the 255-... before is just to arrange values because it was inverted
Forward();
}
//Backward sequence
if(255-ps2x.Analog(PSS_LY) < 120){
Serial.println("Backward");
Backward();
}
//Right sequence
if(ps2x.Analog(PSS_LX) > 130){ //X Axis wasn't inverted that's why you don't see the 255-...
Serial.println("Right");
Right();
}
//Left sequence
if(ps2x.Analog(PSS_LX) < 120){
Serial.println("Left");
Left();
}
//Cradle Right
if(255-ps2x.Analog(PSS_RX) < 120){ //If the stick is pointed to the right
Serial.println("C Right"); //We read the current servo position (a=Servo1.read())
Serial.println(ps2x.Analog(PSS_RX)); //And we decrement '1'
a=a-1; //Then we write the new position which is a-1 you can change the '1' to higher to make it turn fast
Servo1.write(a);
//Cradle Left
}
if(255-ps2x.Analog(PSS_RX) > 130){
Serial.println("C Left");
Serial.println(ps2x.Analog(PSS_RX));
a=a+1;
Servo1.write(a);
}
//Cradle Up
if(255-ps2x.Analog(PSS_RY) < 120){
Serial.println("C Up");
Serial.println(ps2x.Analog(PSS_RY));
b=b+1;
Servo2.write(b);
//Cradle Down
}
if(255-ps2x.Analog(PSS_RY) > 130){
Serial.println("C Down");
Serial.println(ps2x.Analog(PSS_RY));
b=b-1;
Servo2.write(b);
}
delay(50);
}
void Forward(){
int F1 = map(255-ps2x.Analog(PSS_LY), 130, 255, 0, 255); //Changing the signal received from 130-255 to 0-255 to be able to write that value as PWM signal
digitalWrite(in1, LOW); //To control the speed
digitalWrite(in2, HIGH);
analogWrite(EnA,F1);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
analogWrite(EnB,F1);
Serial.println(F1);
}
void Backward(){
int F2 = map(255-ps2x.Analog(PSS_LY), 120, 0, 0, 255);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
analogWrite(EnA,F2);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
analogWrite(EnB,F2);
Serial.println(F2);
}
void Right(){
int F3 = map(255-ps2x.Analog(PSS_LX), 120, 0, 0, 255);
digitalWrite(in1, LOW); //Turning sequence that suited me I stop on track and turn the other
digitalWrite(in2, LOW); //You can turn them on different sides to make it turn fast
analogWrite(EnA,F3);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
analogWrite(EnB,F3);
Serial.println(F3);
}
void Left(){
int F4 = map(255-ps2x.Analog(PSS_LX), 130, 255, 0, 255);
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
analogWrite(EnA,F4);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
analogWrite(EnB,0);
Serial.println(F4);
}
void Stop(){
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
analogWrite(EnA,0);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
analogWrite(EnB,0);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.