


Hardware components | ||||||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
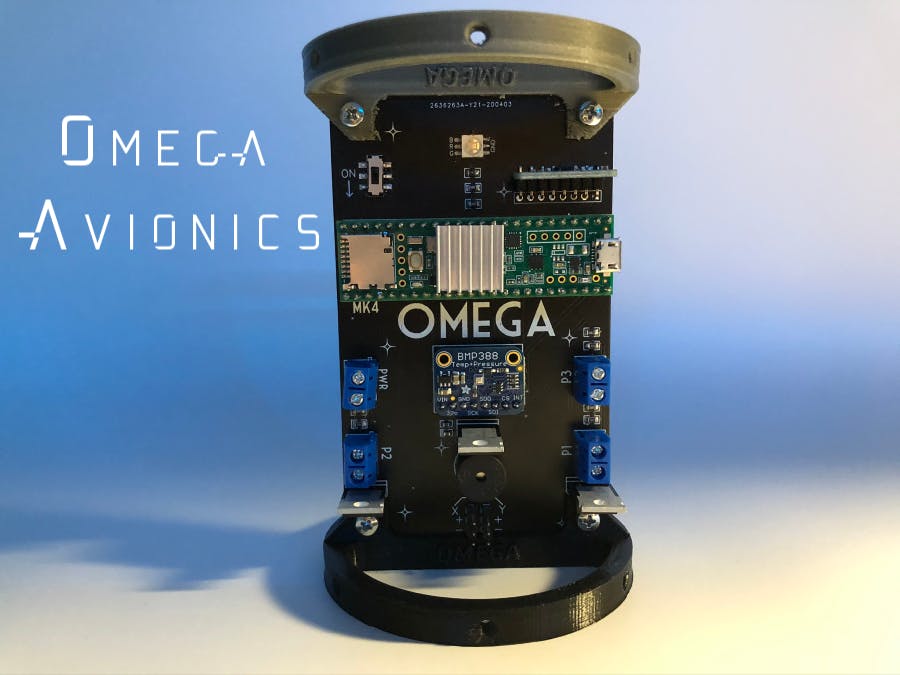
Hey Everyone! I have been working on this project for 9 months now and I am finally ready to open source the flight computer!!! If you would like to build one and you need help contact me on my website: https://deltaspacesystems.wixsite.com/rockets
The kit to build the computer is on my website along with instructions.
// 2020 Delta Space Systems //
float PIDX, PIDY, errorX, errorY, previous_errorX, previous_errorY, pwmX, pwmY;
#include <Wire.h>
#include <Kalman.h> // Source: https://github.com/TKJElectronics/KalmanFilter
#include <Servo.h>
#define RESTRICT_PITCH // Comment out to restrict roll to 90deg instead - please read: http://www.freescale.com/files/sensors/doc/app_note/AN3461.pdf
Servo servoY;
Servo servoX;
Kalman kalmanX; // Create the Kalman instances
Kalman kalmanY;
double accX, accY, accZ;
double gyroX, gyroY, gyroZ;
int desired_angleX = 193;//servoY
int desired_angleY = -18; // servoX
double gyroXangle, gyroYangle; // Angle calculate using the gyro only
double kalAngleX, kalAngleY; // Calculated angle using a Kalman filter
int ledblu=2;
int ledgrn=5;
int ledred=6;
int buzzer=21;
uint32_t timer;
uint8_t i2cData[14]; // Buffer for I2C data
float pidX_p=0;
float pidX_i=0;
float pidX_d=0;
float pidY_p=0;
float pidY_d=0;
/////////////////PID CONSTANTS/////////////////
double kp=0.16;//3.55
double ki=0;//2.05
double kd=0.045;//2.05
///////////////////////////////////////////////
int State = 0;
void setup() {
pinMode(ledblu, OUTPUT);
pinMode(ledgrn, OUTPUT);
pinMode(ledred, OUTPUT);
pinMode(buzzer, OUTPUT);
servoY.attach(30);
servoX.attach(29);
Serial.begin(115200);
Wire.begin();
#if ARDUINO >= 157
Wire.setClock(400000UL); // Set I2C frequency to 400kHz
#else
TWBR = ((F_CPU / 400000UL) - 16) / 2; // Set I2C frequency to 400kHz
#endif
i2cData[0] = 7; // Set the sample rate to 1000Hz - 8kHz/(7+1) = 1000Hz
i2cData[1] = 0x00; // Disable FSYNC and set 260 Hz Acc filtering, 256 Hz Gyro filtering, 8 KHz sampling
i2cData[2] = 0x00; // Set Gyro Full Scale Range to 250deg/s
i2cData[3] = 0x00; // Set Accelerometer Full Scale Range to 2g
while (i2cWrite(0x19, i2cData, 4, false)); // Write to all four registers at once
while (i2cWrite(0x6B, 0x01, true)); // PLL with X axis gyroscope reference and disable sleep mode
while (i2cRead(0x75, i2cData, 1));
if (i2cData[0] != 0x68) { // Read "WHO_AM_I" register
Serial.print(F("Error reading sensor"));
while (1);
}
delay(100); // Wait for sensor to stabilize
while (i2cRead(0x3B, i2cData, 6));
accX = (int16_t)((i2cData[0] << 8) | i2cData[1]);
accY = (int16_t)((i2cData[2] << 8) | i2cData[3]);
accZ = (int16_t)((i2cData[4] << 8) | i2cData[5]);
#ifdef RESTRICT_PITCH // Eq. 25 and 26
double roll = atan2(accY, accZ) * RAD_TO_DEG;
double pitch = atan(-accX / sqrt(accY * accY + accZ * accZ)) * RAD_TO_DEG;
#else // Eq. 28 and 29
double roll = atan(accY / sqrt(accX * accX + accZ * accZ)) * RAD_TO_DEG;
double pitch = atan2(-accX, accZ) * RAD_TO_DEG;
#endif
kalmanX.setAngle(roll); // Set starting angle
kalmanY.setAngle(pitch);
gyroXangle = roll;
gyroYangle = pitch;
timer = micros();
digitalWrite(ledgrn, HIGH);
servoX.write(93);
servoY.write(103);
delay(1000);
digitalWrite(ledgrn, LOW);
digitalWrite(buzzer, HIGH);
digitalWrite(ledred, HIGH);
servoX.write(107);
delay(200);
digitalWrite(buzzer, LOW);
servoY.write(123);
delay(200);
digitalWrite(ledred, LOW);
digitalWrite(buzzer, HIGH);
digitalWrite(ledblu, HIGH);
servoX.write(93);
delay(200);
digitalWrite(buzzer, LOW);
servoY.write(103);
delay(200);
digitalWrite(ledblu, LOW);
digitalWrite(buzzer, HIGH);
digitalWrite(ledgrn, HIGH);
servoX.write(80);
delay(200);
digitalWrite(buzzer, LOW);
servoY.write(83);
delay(200);
servoX.write(93);
delay(200);
servoY.write(103);
delay(500);
}
void loop() {
/* Update all the values */
while (i2cRead(0x3B, i2cData, 14));
accX = (int16_t)((i2cData[0] << 8) | i2cData[1]);
accY = (int16_t)((i2cData[2] << 8) | i2cData[3]);
accZ = (int16_t)((i2cData[4] << 8) | i2cData[5]);
gyroX = (int16_t)((i2cData[8] << 8) | i2cData[9]);
gyroY = (int16_t)((i2cData[10] << 8) | i2cData[11]);
gyroZ = (int16_t)((i2cData[12] << 8) | i2cData[13]);;
systemstateabort();
pidcompute();
}
void pidcompute () {
double dt = (double)(micros() - timer) / 1000000; // Calculate delta time
timer = micros();
#ifdef RESTRICT_PITCH // Eq. 25 and 26
double roll = atan2(accY, accZ) * RAD_TO_DEG;
double pitch = atan(-accX / sqrt(accY * accY + accZ * accZ)) * RAD_TO_DEG;
#else // Eq. 28 and 29
double roll = atan(accY / sqrt(accX * accX + accZ * accZ)) * RAD_TO_DEG;
double pitch = atan2(-accX, accZ) * RAD_TO_DEG;
#endif
double gyroXrate = gyroX / 131.0; // Convert to deg/s
double gyroYrate = gyroY / 131.0; // Convert to deg/s
#ifdef RESTRICT_PITCH
// This fixes the transition problem when the accelerometer angle jumps between -180 and 180 degrees
if ((roll < -90 && kalAngleX > 90) || (roll > 90 && kalAngleX < -90)) {
kalmanX.setAngle(roll);
kalAngleX = roll;
gyroXangle = roll;
} else
kalAngleX = kalmanX.getAngle(roll, gyroXrate, dt); // Calculate the angle using a Kalman filter
if (abs(kalAngleX) > 90)
gyroYrate = -gyroYrate; // Invert rate, so it fits the restriced accelerometer reading
kalAngleY = kalmanY.getAngle(pitch, gyroYrate, dt);
#else
// This fixes the transition problem when the accelerometer angle jumps between -180 and 180 degrees
if ((pitch < -90 && kalAngleY > 90) || (pitch > 90 && kalAngleY < -90)) {
kalmanY.setAngle(pitch);
kalAngleY = pitch;
gyroYangle = pitch;
} else
kalAngleY = kalmanY.getAngle(pitch, gyroYrate, dt); // Calculate the angle using a Kalman filter
if (abs(kalAngleY) > 90)
gyroXrate = -gyroXrate; // Invert rate, so it fits the restriced accelerometer reading
kalAngleX = kalmanX.getAngle(roll, gyroXrate, dt); // Calculate the angle using a Kalman filter
#endif
pwmX = max(pwmX, (desired_angleX - 20));
pwmY = max(pwmY, (desired_angleY - 20));
pwmX = min(pwmX, (desired_angleX + 20));
pwmY = min(pwmY, (desired_angleY + 20));
errorX = kalAngleX - desired_angleX;
errorY = kalAngleY - desired_angleY;
pidX_p = kp*errorX;
pidX_d = kd*((errorX - previous_errorX)/dt);
pidY_p = kp*errorY;
pidY_d = kd*((errorY - previous_errorY)/dt);
pidX_i = ki*errorX*dt;
previous_errorX = errorX;
previous_errorY = errorY;
PIDX = pidX_p + pidX_i + pidX_d;
PIDY = pidY_p + pidY_d;
pwmX = -1*((PIDX * 5.8) + 90);
pwmY = ((PIDY * 5.8) + 90);
servowrite();
}
void servowrite () {
servoX.write(pwmX);
servoY.write(pwmY);
}
void systemstateabort() {
if (kalAngleX > 40 || kalAngleY > 40){
digitalWrite(ledgrn, LOW);
digitalWrite(ledblu, HIGH);
//digitalWrite(buzzer, HIGH);
}
}
/* Copyright (C) 2012 Kristian Lauszus, TKJ Electronics. All rights reserved.
This software may be distributed and modified under the terms of the GNU
General Public License version 2 (GPL2) as published by the Free Software
Foundation and appearing in the file GPL2.TXT included in the packaging of
this file. Please note that GPL2 Section 2[b] requires that all works based
on this software must also be made publicly available under the terms of
the GPL2 ("Copyleft").
Contact information
-------------------
Kristian Lauszus, TKJ Electronics
Web : http://www.tkjelectronics.com
e-mail : kristianl@tkjelectronics.com
*/
const uint8_t IMUAddress = 0x68; // AD0 is logic low on the PCB
const uint16_t I2C_TIMEOUT = 1000; // Used to check for errors in I2C communication
uint8_t i2cWrite(uint8_t registerAddress, uint8_t data, bool sendStop) {
return i2cWrite(registerAddress, &data, 1, sendStop); // Returns 0 on success
}
uint8_t i2cWrite(uint8_t registerAddress, uint8_t *data, uint8_t length, bool sendStop) {
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
Wire.write(data, length);
uint8_t rcode = Wire.endTransmission(sendStop); // Returns 0 on success
if (rcode) {
Serial.print(F("i2cWrite failed: "));
Serial.println(rcode);
}
return rcode; // See: http://arduino.cc/en/Reference/WireEndTransmission
}
uint8_t i2cRead(uint8_t registerAddress, uint8_t *data, uint8_t nbytes) {
uint32_t timeOutTimer;
Wire.beginTransmission(IMUAddress);
Wire.write(registerAddress);
uint8_t rcode = Wire.endTransmission(false); // Don't release the bus
if (rcode) {
Serial.print(F("i2cRead failed: "));
Serial.println(rcode);
return rcode; // See: http://arduino.cc/en/Reference/WireEndTransmission
}
Wire.requestFrom(IMUAddress, nbytes, (uint8_t)true); // Send a repeated start and then release the bus after reading
for (uint8_t i = 0; i < nbytes; i++) {
if (Wire.available())
data[i] = Wire.read();
else {
timeOutTimer = micros();
while (((micros() - timeOutTimer) < I2C_TIMEOUT) && !Wire.available());
if (Wire.available())
data[i] = Wire.read();
else {
Serial.println(F("i2cRead timeout"));
return 5; // This error value is not already taken by endTransmission
}
}
}
return 0; // Success
}
OmegaSoft-1.2.ino
C/C++Yay, after about 2 weeks i finished up my new flagship software. It now features the full PID controller as apposed to just PD. Also it has a launch detection mode so it knows when launch has occurred, and it is using a raw gyro so no more nasty accelerometer readings!
/* Delta Space Systems
Version 1.2
May, 8th 2020*/
#include <SD.h>
#include <SPI.h>
#include <Servo.h>
#include<Wire.h>
//#include <KalmanFilter.h>
const int MPU=0x68;
int16_t AcX,AcY,AcZ,Tmp,GyX,GyroY,GyroZ;
double PIDX, PIDY, errorX, errorY, previous_errorX, previous_errorY, pwmX, pwmY, gyroXX, gyroYY;
int desired_angleX = 0;//servoY
int desired_angleY = 0;//servoX
int servoX_offset = 100;
int servoY_offset = 100;
int servoXstart = 80;
int servoYstart = 80;
float servo_gear_ratio = 5.8;
double accAngleX;
double accAngleY;
double yaw;
double GyroX;
double gyroAngleX;
double gyroAngleY;
double pitch;
int ledblu = 2; // LED connected to digital pin 9
int ledgrn = 5; // LED connected to digital pin 9
int ledred = 6; // LED connected to digital pin 9
int mosfet = 24;
Servo servoX;
Servo servoY;
int pyro1 = 24;
int buzzer = 21;
double dt, currentTime, previousTime;
float pidX_p = 0;
float pidX_i = 0;
float pidX_d = 0;
float pidY_p = 0;
float pidY_i = 0;
float pidY_d = 0;
int pos;
double kp = 0.15;
double ki = 0.0;
double kd = 0.0;
int state = 0;
//KalmanFilter kalman(0.001, 0.003, 0.03);
void setup(){
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
Serial.begin(9600);
servoX.attach(29);
servoY.attach(30);
pinMode(mosfet, OUTPUT);
pinMode(ledblu, OUTPUT);
pinMode(ledgrn, OUTPUT);
pinMode(ledred, OUTPUT);
pinMode(buzzer, OUTPUT);
pinMode(pyro1, OUTPUT);
startup();
}
void loop() {
previousTime = currentTime;
currentTime = millis();
dt = (currentTime - previousTime) / 1000;
accAngleX = (atan(AcY / sqrt(pow(AcX, 2) + pow(AcZ, 2))) * 180 / PI) - 0.58; // AccErrorX ~(0.58) See the calculate_IMU_error()custom function for more details
accAngleY = (atan(-1 * AcX / sqrt(pow(AcY, 2) + pow(AcZ, 2))) * 180 / PI) + 1.58; //
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU,12,true);
AcX=Wire.read()<<8|Wire.read();
AcY=Wire.read()<<8|Wire.read();
AcZ=Wire.read()<<8|Wire.read();
GyroX=Wire.read()<<8|Wire.read();
GyroY=Wire.read()<<8|Wire.read();
GyroZ=Wire.read()<<8|Wire.read();
datadump();
launchdetect();
}
void accel_degrees () {
double prevgyroX = GyroZ;
double prevgyroY = GyroY;
//converting angular acceleration to degrees
gyroAngleX += (((GyroZ + prevgyroX) / 2)* dt); // deg/s * s = deg
gyroAngleY += (((GyroY + prevgyroY) / 2)* dt);
//complimentary filter
double OrientationX = 0.94 * gyroAngleX + 0.06 * accAngleX;
double OrientationY = 0.94 * gyroAngleY + 0.06 * accAngleY;
//divided by 32.8 as recommended by the datasheet
pitch = OrientationX / 32.8;
yaw = OrientationY / 32.8;
pidcompute();
}
void servowrite() {
servoX.write(pwmX);
servoY.write(pwmY);
}
void pidcompute () {
previous_errorX = errorX;
previous_errorY = errorY;
errorX = pitch - desired_angleX;
errorY = yaw - desired_angleY;
//Defining "P"
pidX_p = kp*errorX;
pidY_p = kp*errorY;
//Defining "D"
pidX_d = kd*((errorX - previous_errorX)/dt);
pidY_d = kd*((errorY - previous_errorY)/dt);
//Defining "I"
pidX_i = ki * (pidX_i + errorX * dt);
pidY_i = ki * (pidY_i + errorY * dt);
PIDX = pidX_p + pidX_i + pidX_d;
PIDY = pidY_p + pidY_i + pidY_d;
pwmX = ((PIDX * servo_gear_ratio) + servoX_offset);
pwmY = ((PIDY * servo_gear_ratio) + servoY_offset);
servowrite();
}
void startup () {
digitalWrite(ledgrn, HIGH);
servoX.write(servoXstart);
servoY.write(servoYstart);
delay(1000);
digitalWrite(ledgrn, LOW);
digitalWrite(buzzer, HIGH);
digitalWrite(ledred, HIGH);
servoX.write(servoXstart + 20);
delay(200);
digitalWrite(buzzer, LOW);
servoY.write(servoYstart + 20);
delay(200);
digitalWrite(ledred, LOW);
digitalWrite(buzzer, HIGH);
digitalWrite(ledblu, HIGH);
servoX.write(servoXstart);
delay(200);
digitalWrite(buzzer, LOW);
servoY.write(servoYstart);
delay(200);
digitalWrite(ledblu, LOW);
digitalWrite(buzzer, HIGH);
digitalWrite(ledgrn, HIGH);
servoX.write(servoXstart - 20);
delay(200);
digitalWrite(buzzer, LOW);
servoY.write(servoYstart - 20);
delay(200);
servoX.write(servoXstart);
delay(200);
servoY.write(servoYstart);
delay(500);
}
void launchdetect () {
if (AcX > 17000) {
state = 1;
}
if (state == 1) {
accel_degrees();
}
}
void datadump () {
Serial.println(AcX);
Serial.print(AcZ);
}

16 projects • 214 followers
Hey I am Cole, the lead engineer at Delta Space Systems!
Youtube Channel: https://www.youtube.com/channel/UC7Nhgj_PVCtroPXHMhdku-g




{kind=link}
Comments