


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
Ich veranstalte seit vielen Jahren Robotik Workshops für Schüler die etwa 12-15 Jahre alt sind und i.d.R. noch keine Berührung mit dem Thema hatten. So ein Workshop dauert ein ganzes Wochenende. Am erstem Tag wird ein kleines Roboterfahrzeug zusammengebaut (Chassis, Aktorik, Sensorik, Controllerboard) und eine Funktionsprüfung vorgenommen. Am zweitem Tag geht es an die Programmierung, wobei die Schüler kleine Aufgaben lösen und spielerisch die Möglichkeiten erkunden. Am Ende sind alle in der Lage selbstständig einen einfachen Linienfolger zu programmieren. Die Schüler nehmen ihren Roboter dann mit, und können zu Hause weitermachen und die Möglichkeiten erforschen.
Bisher setzte ich als Controllerboard eine Eigenentwicklung ein, möchte diese aber durch den Calliope mini ersetzen. Das bedeutet zwar hier und da Einschränkungen in der Funktionalität. Aber für eigene Experimente, Veränderungen und Erweiterungen auch mehr Möglichkeiten. Vor allem will ich die Zusammenarbeit mit dem Schulbuchverlag und den Austausch mit einer größeren Community als positiv hervorheben.
Aktuell bin ich dabei, das Ganze zu testen, damit bereits der nächste Workshop mit Calliope stattfinden kann.
Ich stelle das hier als Projekt vor, um Verbesserungsvorschläge, Ideen und weitere Anregungen zu erhalten.
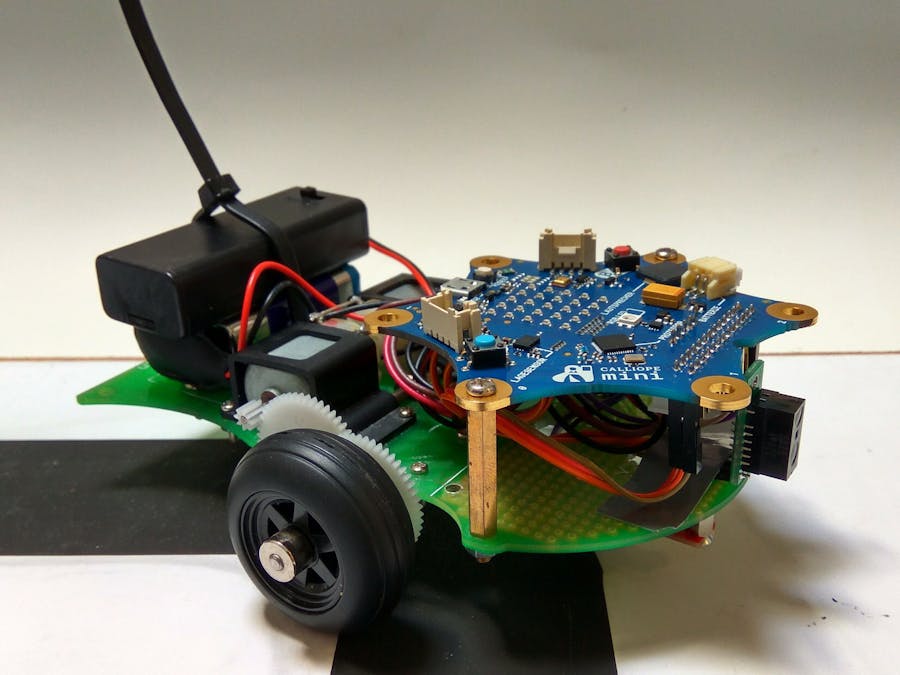
Das Chassis und der Calliope Controller passen gut zusammen. Die Stromversorgung erfolgt getrennt für den Callipe und die Motoren. Einmal durch den beim Calliope mini mitgelieferten Batteriekasten und für die Motoren durch eine 9V Blockbatterie. Ein Ein IR Reflexkoppler an C17 fungiert als Helligkeitssensor für die Linienverfolgung. Ein optischer Kollisionssensor an C1 löst bei einem Objekt in 5cm Entfernung aus. C16 vom Grove Port A1 ist freigehalten damit von dort ggf. ein Grove Relais auch die Rückwärtsfahrt ermöglichen kann.
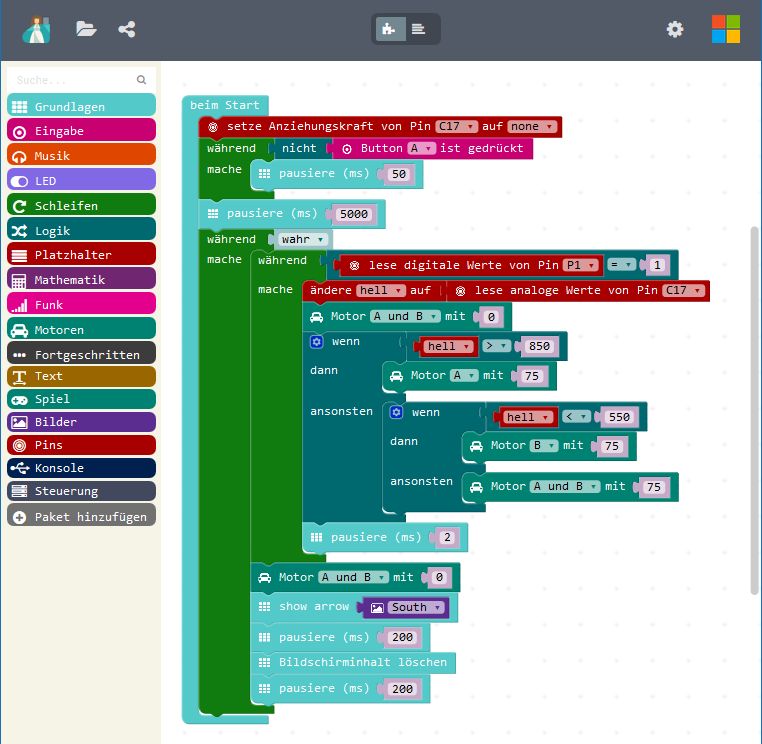
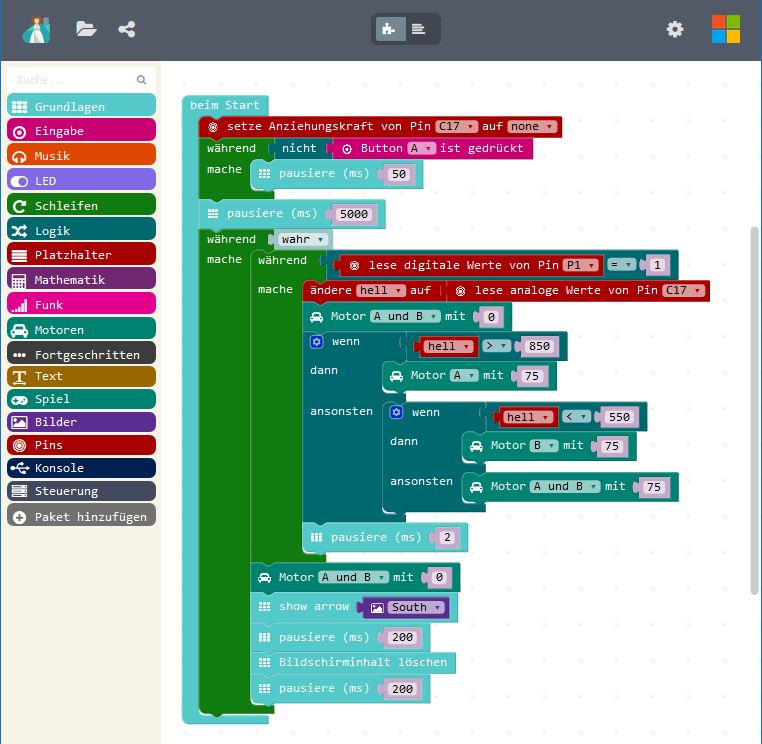
Der Algorithmus für einen Linienfolger ist relativ einfach gehalten und funktioniert zuverlässig.
Funktionsweise:
Das Beispielprogramm wartet auf einen Tastendruck bei A und startet das Fahrzeug, dass sich dann an der Grenzlinie zwischen Schwarz und Weiß bewegt. Das wird solange gemacht, bis ein Hindernis erkannt wird. Auf dem Calliope LED Feld wird durch einen blinkenden Pfeil angezeigt, dass das Hindernis aus dem Weg geräumt werden soll. Wenn das geschehen ist, kann die Fahrt fortgesetzt werden. Das Ganze kann durch einen Druck auf die Reset-Taste wieder in den Startzustand zurückgesetzt werden.
Motoren
Stromversorgung: Die Motoren sind zwar 3V Motoren aber die Motorstromversorgung ist trotzdem mit einer 9V Blockbatterie richtig dimensioniert, da in der Firmware des Calliope die PWM Dauer durch zwei geteilt wird und es ja auch Spannungsabfälle am Motortreiber gibt.
Wenn der Calliope mini Bot längere Zeit (Wochen) ausgeschaltet ist, sollte die Blockbatterie abgenommen werden, da diese sich im Laufe von Monaten entleert.
Anschlüsse
Den Anschluss der Motoren über die 5polige Erweiterungsleiste des Calliope mini ist mit einem gewinkelten Steckverbinder realisiert worden.
Hier wird die Motorbatterie und beide Motoren angeschlossen. Die Steckverbindung ermöglicht es, das Calliope Board einfach von der Motorhardware zu trennen.
Für eine übersichtliche Verkabelung sollten die Leitungen auf eine passende Länge gekürzt und dann an die Motoren und den Batteriehalter angelötet werden.


{kind=link}
Comments
Please log in or sign up to comment.