


Hardware components | ||||||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
| ||||||
In this project I will show you how to easily build your own low-cost Arduino Mini CNC Plotter!
For X and Y axis we will use stepper motors and rails from two dvd/cd roms! Printing area will be max 4x4cm.
Because it works with serial communication you can also use a Bluetooth module (like HC-06) to print your stuff wirelessly through your computer Bluetooth connection!
I have used the code from this site, so I need to thank the Makerblog.at for sharing this to us.
You can visit my site www.ardumotive.com for more cool arduino projects!
Watch presentation video below and proceed to next step!
Don't be afraid to build it, is very easy! This tutorial is also made for beginners!
Let's get started!
Step 1: What you will needFor this project you will need:
Part list for beginners:
- Arduino uno
- Breadboard
- 2x L293D ICs Motor driver
- Mini Servo Motor
- 2x DVD/CD Drives
Part list for 'pro' :
- ATmega328p (with Arduino Bootloader)*
- 28 pin DIP IC Socket
- 16MHz Crystal Oscillator
- 2x 22pF and 1x 100nF capacitors
- 10K resistor
- USB to Serial adapter**
- 2x L293D ICs
- Mini Servo Motor
- 2x DVD/CD Drives
- Prototyping PCB Circuit Board Stripboard
- 4x 2pins Screw Terminal Connector (or 2x 4 pins Screw Terminal Connector)***
*You will need also an Arduino UNO board to program the ATmega328 micro possessor
**USB to Serial adapter will allow the circuit to communicate with the computer through the USB cable, just like Arduino uno does.
***Why to use screw terminal connectors? Because you don't want to solder and desolder cables from stepper motors until you find the correct working combination.
Tools (only for 'pro' part list):
- Screwdriver
- Soldering iron
- Solder
- Cutting tool (e.g. Dremel) (Optional for cutting plastic parts)
- Glue
First step to start building this cnc machine is to disassemble two dvd/cd drives and take off them the stepper motors. Use the screwdriver to open them and take off them the rails.
Next step is to choose our base for this CNC machine. I used one surface from remaining dvd 'garbage' stuff.
Finally we will need to find something to attach the one of the stepper-rails vertically to our construction. (you will understand what I mean in our next step) Watch the above image.
Step 3: X and Y axisIn first image above you will see the Y axis of our CNC machine. Attach it on your surface, in this part you will need some screws and nuts.
In second image you will see the X and Y axis. The X axis is attached to two plastic parts that I took from remaining 'garbage' stuff. I cut it to fit the construction.
This is an easy procedure. Just make sure to put the Y axis straight to CNC base and the X axis vertically in this (90 degrees).
Step 4: The Z axisThat's the most difficult part of our construction.
You will need something to attach it on X axis, a flat surface. On that surface you will attach the servo motor (Z axis) and the pen base. Pen (or pencil) must be able to move up and down with the help of servo motor.
Watch the above image to understand what you need to do to duild Z axis.
Tip! Use your imagination ;)
Step 5: Paper baseNow you will have to attach a wood (or plastic) surface on Y axis (5x5cm will be fine).
On this you will put the paper piece to print your texts or images!
Remember, printing area is 4x4cm.
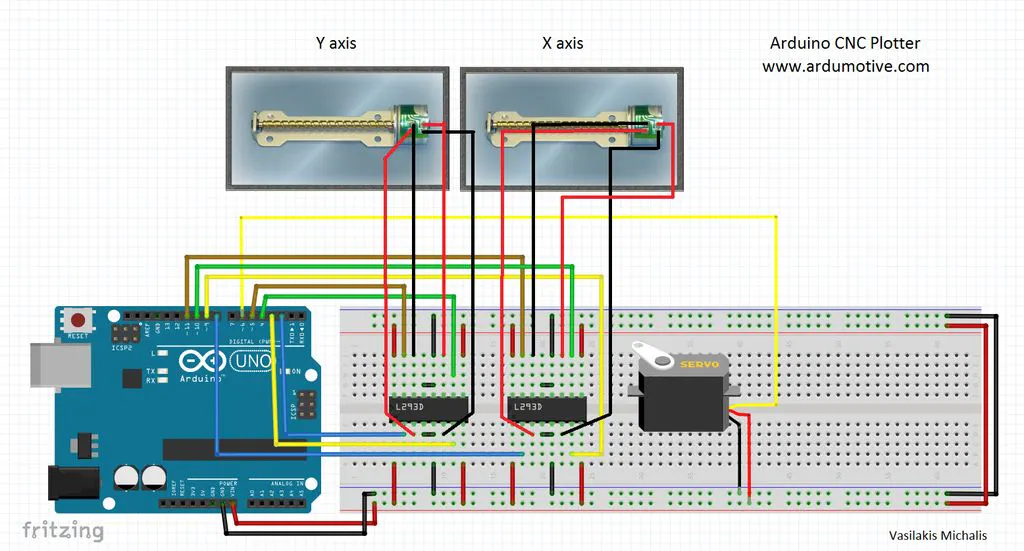
Step 6: The CircuitNow that we have our contraction ready, it's time to build the circuit and test stepper motors (X and Y axis).
Watch the above image with breadboard circuit schematic.
Steppers motors wiring is something that need patient. On next step you will find a 'testing' code for x and y axis. If yours steppers doesn't work properly you must find correct working combination by changing the cables between them and the L293D ICs.
On mine cnc, X axis motor connection are: L293 A: Pins 1 and 3 & B: 2 and 4, but on Y axis motor connection are A: 1 and 2 & B: 3 and 4.
Step 7: Testing X and Y axis movementHere is the X and Y axis testing code embedded using codebender!
For X axis:
For Y axis:
If you see any movement here that means that the stepper motors wiring is correct!
If you don't, try to change the cables...
Step 8: Uploading the CNC codeHere is the main CNC code embedded using codebender!
In this part you will see your pen goes up. If don't, change penUp and penDown variables that controlling the servo motor.
Press the "Run on Arduino" button and program your board from your browser!
Step 9: The GCTRL programNow we are ready to print our first image! To do this we will use the gctrl.pde processing program. This program sends 'gcode' images to the cnc plotter.
What is gcode?
Gcode is a file with X,Y and Z coordinates. Header of this file is set to:
- M300 S30.00 (Servo down)G1 X10.00 Y10.00 F2500.00
- G1 X20.00 Y10.00 F2500.00
- M300 S50.00 (Servo up)
Download Processing from here, now donwload and open GCTRL.pde application.
Click the "play" icon/button to start the program.
Update!You can use gctrl.exe, find files on 'gctrl exe for windows.zip' file.
~Watch the above image~
Now press 'p' and select your Arduino serial port.
Press 'g' and select the 'drawing.gcode' file
(If something goes wrong, press 'x' to stop the plotter)
Step 10: Make your own gcode files!Show All Items
To make gcode files that are compatible with this cnc machine you have to use the Inkscape.
Inkscape is professional quality vector graphics software which runs on Windows, Mac OS X and Linux. It is used by design professionals and hobbyists worldwide, for creating a wide variety of graphics such as illustrations, icons, logos, diagrams, maps and web graphics. Inkscape uses the W3C open standard SVG (Scalable Vector Graphics) as its native format, and is free and open-source software.
Download and install Inkscape from here (Important: download 0.48.5 version)
Now you need to install an Add-on that enables the export images to gcode files. This add on can be found here with installation notes.
Setup Inkscape for first use
Open the Inkscape, go to File menu and click "Document Properties". See the 1st image above and make the changes, make sure to change first to "cm". Now close this window.
We will use the area within 4 to 8 cm. See the 2nd image above.
How to print texts
Put text, change font to Times New Roman and size to 22. Now click on cursor icon and center the text like the 3rd image above. Select Path from menu and "Object to Path".
How to print images
This is more difficult than texts. Images must have a transparent background. Drag and drop the arduino logo image (download it from files) in Inkscape. Click ok to the next window. Now you have to re-size the image to fit our printing area, see the 4th image above. Click Path from menu and "Trace Bitmap".
Make changes as the 5th image above. Click ok and close the window. Now, move the gray scale image, and delete the color one behind it. Move the grey image to the correct place again and click from Path menu "Object to path". The 6th image above show how to delete image outline.
Export as gcode
Final, go to file menu, click save as and select .gcode. Click ok on next window. That's it! Ready to go! Use the gctrl.pde app to print the gcode file on your new Arduino CNC Plotter!
I will make a video on next days about this procedure because it's little complicated. It took me a lot of time to understand how it's working...
Step 11: Well done!You have successfully completed this tutorial and you have your own CNC Plotter on your desk!
I would like to see photos of your CNC.
I hope you liked this, let me know in the comments.


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.