/*-------definning Inputs------*/
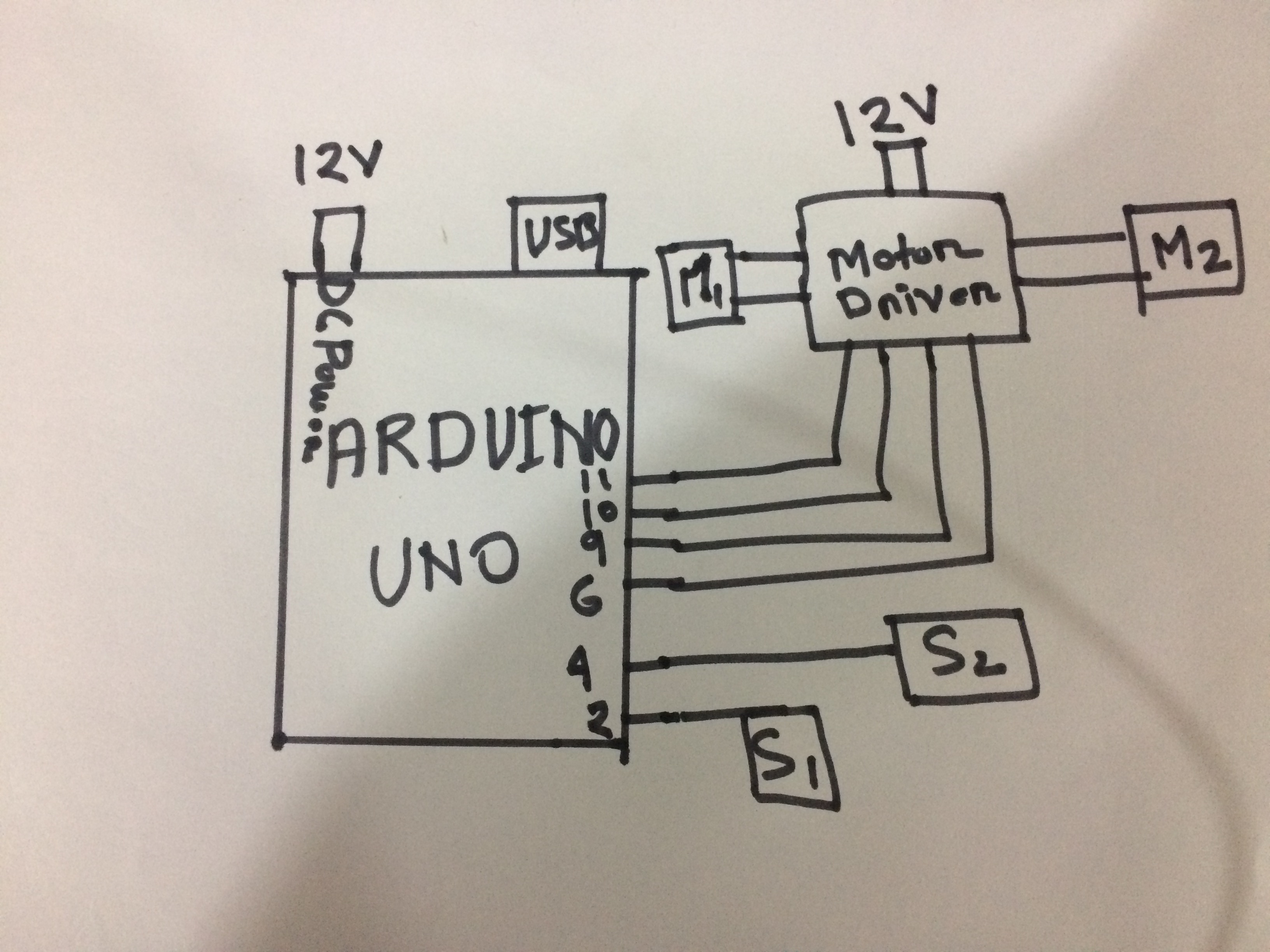
#define LS 2 // left sensor
#define RS 5 // right sensor
/*-------definning Outputs------*/
#define LM1 11 // left motor
#define LM2 10 // left motor
#define RM1 9 // right motor
#define RM2 6 // right motor
void setup()
{
pinMode(LS, INPUT);
pinMode(RS, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
}
void loop(){
if((digitalRead(LS)==LOW) && (digitalRead(RS)==LOW)) // Condition_1 stop
{
MoveForward();
}
if((digitalRead(LS)==HIGH) && (digitalRead(RS)==HIGH)) //CONDITION-2 FORWRD
{
Stop();
}
if((digitalRead(LS)==LOW) && (digitalRead(RS)==HIGH)) // RIGHT
{
TurnLeft();
}
if((digitalRead(LS)==HIGH) && (digitalRead(RS)==LOW))
{
TurnRight();
}
}
void MoveForward()
{
analogWrite(LM1, 50);
analogWrite(LM2, 0);
analogWrite(RM1, 50);
analogWrite(RM2, 0);
delay(20);
}
void TurnRight()
{
analogWrite(LM1, 0);
analogWrite(LM2, 60);
analogWrite(RM1, 60);
analogWrite(RM2, 0);
delay(30);
}
void TurnLeft()
{
analogWrite(LM1, 60);
analogWrite(LM2, 0);
analogWrite(RM1, 0);
analogWrite(RM2, 60);
delay(30);
}
void Stop()
{
analogWrite(LM1, 0);
analogWrite(LM2, 0);
analogWrite(RM1, 0);
analogWrite(RM2, 0);
delay(20);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)









_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.