sssThe project is about developing a pair of smart goggles that use sensors, wireless communication, and feedback mechanisms to assist blind or visually impaired individuals in detecting obstacles and navigating their surroundings. The goggles provide real-time feedback through vibrations, sounds, or voice guidance, allowing users to be more aware of their environment.
How does it works?
Sensors: The goggles are equipped with ultrasonic and IR sensors that detect obstacles in the user’s path. The sensors measure the distance between the user and nearby objects.
- Microcontroller: The onboard microcontroller processes the data from the sensors and determines the appropriate feedback.
- Feedback Mechanisms: Depending on the proximity of obstacles, the goggles provide haptic (vibration) or auditory (beeps or voice) feedback to alert the user.
- Bluetooth Communication: The goggles can connect to a smartphone via Bluetooth, enabling advanced features like voice commands or GPS navigation.
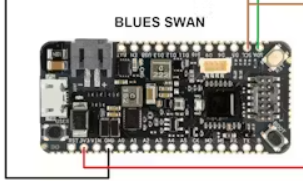
- Cloud Connectivity: Using Blues Wireless Notecard, the goggles can send data to the cloud for further processing or remote monitoring, allowing for features like remote assistance or advanced data analytics.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.